苹果采摘机机构设计与仿真毕业论文
2020-04-05 10:49:41
摘 要
苹果作为消费品在市场中,鲜果占到的比率大约是90%,而对其加工后的产品仅仅占10%。而且中国的苹果种植面积在世界上总的种植面积中占到40%左右,完全可以说在苹果的生产和消费市场上,中国具有举足轻重的地位。所以,对于我国苹果的生产而言,及时采摘和运输及相关的后处理就显得非常重要。但随着我国的经济水平的提高,劳动力成本也随之提高,苹果采摘的人工费用使得苹果产业的经济性降低。
苹果采摘的时间集中,也就是具有季节性,所以需要在短时间投入大量的人力、物力。并且苹果生长位置不规律,现阶段我国的苹果生产仍然大部分需要人工采摘。所以,苹果的采摘工作作为苹果生产中最费时、费力并且耗费成本最大的一个难题,其所占的成本超过了整个苹果生产一般以上。故而,研发一种高效、低成本、适合现阶段苹果栽培模式的采摘机,对于我国苹果产业发展具有重要的现实意义。
本课题旨在拟设计一种苹果采摘机的机构部分,主要内容包括以下部分:
(1)基于果树的种植特点,设计采摘机的机构部分,分析各个部分的传动方案和确定具体的尺寸、伺服电机的型号等。
(2)基于creo2.0软件,建立设计的采摘机的三维模型。
(3)在软件ADAMS软件环境下,对采摘机进行运动和动力学仿真,分析电机选型的正确性。
关键词:苹果采摘机;结构设计;运动学仿真
Abstract
Apple as a consumer product in the market, the ratio of fresh fruit is about 90%, and its processed products account for only 10%. Moreover, China's apple planting area accounts for about 40% of the total planted area in the world, and it can be said that China plays a decisive role in Apple's production and consumer markets. Therefore, for the production of apples in China, timely picking and transportation and related post-processing are very important. However, with the improvement of China’s economic level, labor costs have also increased. The labor costs of apple picking have made the economics of the Apple industry lower.
The time for picking apples is concentrated, that is, they are seasonal. Therefore, a lot of manpower and material resources need to be invested in a short period of time. And the growing position of apples is not regular. At this stage, most of the apple production in China still needs manual picking. Therefore, Apple's picking work is one of the most time-consuming, laborious and costly problems in Apple's production, and its cost exceeds that of Apple's production. Therefore, the development of an efficient, low-cost picking machine suitable for the current apple cultivation model has important practical significance for the development of the apple industry in China.
This topic aims to design an organization part of an apple picking machine. These contents mainly include the following parts:
(1) Based on the planting characteristics of fruit trees, the mechanism part of the picking machine is designed, the transmission scheme of each part is analyzed, and the specific dimensions and the model of the servo motor are determined.
(2) Based on creo2.0 software, a three-dimensional model of the designed picking machine was established.
(3) Under the environment of software ADAMS software, the movement and dynamics simulation of the picking machine is performed to analyze the correctness of motor selection.
Keywords: apple picker; structural design; kinematics simulation
目录
摘要 I
Abstract II
第一章 绪论 1
1.1课题的来源 1
1.2课题研究的意义和目的 1
1.3国内外研究现状 2
1.3.1国外果园采摘机研究现状 2
1.3.2国内果园采摘机研究现状 3
1.4本文主要研究内容 4
第二章 苹果采摘机的机构方案 5
2.1机构介绍 5
2.2末端执行器方案 6
2.3采摘机械臂方案 6
2.3.1各轴传动方案 8
2.4本章小结 9
第三章 机构具体设计及建模 10
3.1末端执行器设计 10
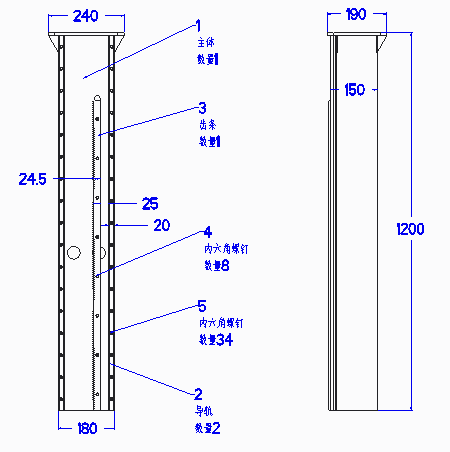
3.2水平轴设计 11
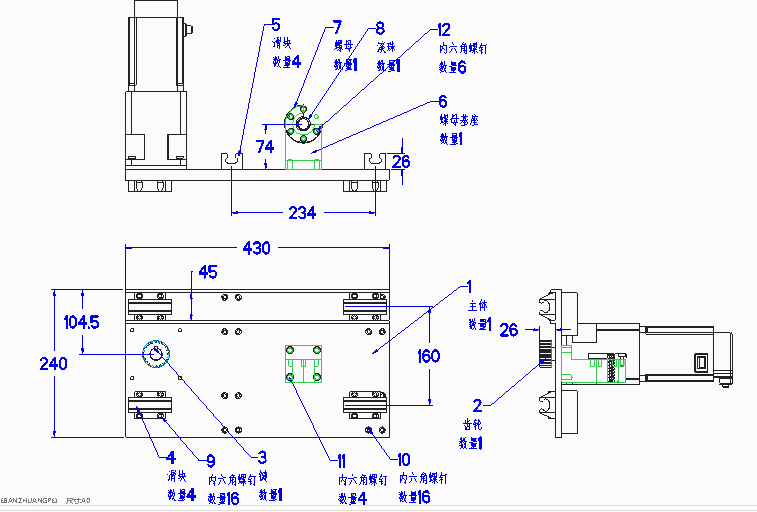
3.3连接板设计 12
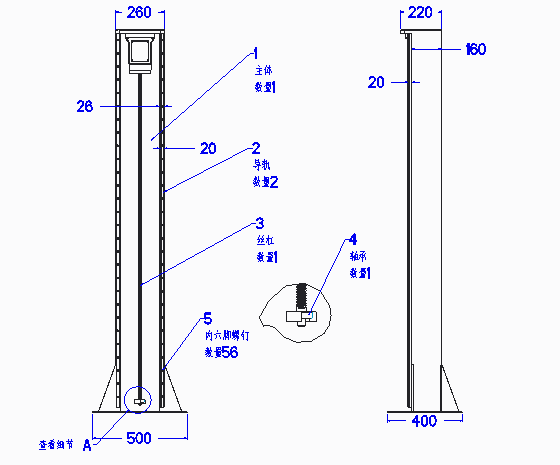
3.4垂直轴设计 14
3.5电机选型 15
3.6本章小结 16
第四章 采摘机机构仿真 17
4.1前言 17
4.2模型的导入 17
4.3模型的定义和创建约束 17
4.4力的加载和结果分析 18
4.5本章小结 20
第五章 环境影响及经济性分析 21
5.1环境影响分析 21
5.2经济性分析 21
第六章 总结和展望 23
6.1全文总结 23
6.2展望 23
参考文献 24
致谢 25
第一章 绪论
1.1课题的来源
随着中国经济的飞速发展,我国的农业产业也得到了长足的进步。为了增加苹果产业的竞争力,使其更好地服务于中国特色社会主义的市场经济,设计和研发一款苹果采摘机也成为亟待解决的课题。
现阶段,我国苹果的栽培方式向着规范化的方向发展,更利于苹果采摘的机械化。这预示着,对于苹果产业,繁重的的人工采摘即将被机械采摘所取代。本文正是在这一背景下产生,并对社会进步具有着积极的意义。
1.2课题研究的意义和目的
改革开放以来,我国的水果生产有了长足进步,但也面临着许多问题亟待解决。例如,大部分的水果生产还比较分散,大部分的工作基本靠人工完成,尤其是水果的采摘环节,最为费时、费力。对于长在果树上的水果尤为如此,劳动工人需要借助梯子才能完成采摘作业。
相比于其他的农业产品,水果采摘的工人劳动强度较高。现阶段,我国的水果产业还达不到机械化水平。所以如何提高水果生产的机械化水平,是现阶段水果生产的关键。
基于此,相比于设计六自由度或者结构更复杂的苹果采摘机,研制一款自由度较少的采摘机。其优点是成本更低、结构更简单、运行更加稳定、维护更方便。缺点是灵活性比较低,也就是无法避较大的障碍物。但通过对果树的培养可以使其利于采摘并克服以上缺陷。综上,设计一种结构简单的三自由度苹果采摘机更具有实用意义。
在查阅了大量的国内外对于苹果采摘机的相关文献后,其中的采摘机大多数还是以较为复杂的采摘机械臂,其结构类似于现在广泛用于汽车制造业和轻工业的机械臂。但是,考虑到苹果采摘机的工作环境较差,采用上述的机械臂结构就显现出一些缺陷。它的结构较为复杂,应用于室外环境必然造成维护困难。同时,复杂的结构对于控制系统也提出了更高的要求,也需要花费更高的成本,降低了经济性。
与此同时,矮化栽培成为主流。在栽培过程中,果树枝条被修剪的更加简洁,也就是减少了在采摘过程中遇到的障碍。
上面的形式表明,未来的苹果采摘机的重点将不是如何实现采摘机的避障,而是在规范化的栽培模式下如何尽量提高采摘效率和降低成本的问题。也就是说,关键的问题是研制出一种成本较低,广大的果农能够支付得起,将在果园中广泛应用的,商品化的苹果采摘机。
本文的目的是设计和研究一款采摘机的机构部分,这种采摘机要求具有结构简单、效率较高的特点,从而减轻广大的苹果采摘工人的劳动量。以机械化生产解放出他们的双手的同时,大大的提高生产效率。
1.3国内外研究现状
1.3.1国外果园采摘机研究现状
对于水果的采摘机械的研究,欧美国家起步较早。大约在上个世纪的中叶就完成了大部分水果生产的机械化,包括水果采摘、运输、后加工等一些列生产活动。现阶段,国外对于水果采摘的研究主要方向是水果采摘的智能化,也就是使苹果采摘机像人一样,能自动识别果实的位置和成熟度,并且准确定位。
众所周知,苹果采摘机的采摘方式有以下三种:撞击式、摇振式、切割式。而现阶段,国外的采摘机不是以上三种方式,而是采用机械臂末端的抓取装置,固定苹果,并且依靠扭转的力量将苹果采摘下来。这种方式对于控制技术、定位技术、识别技术都提出了较高的要求,这种形式显然不适合我国现状。
下面将以时间为轴简要介绍国外水果采摘的发展历程:
由于摇振式的机械结构较为简单,19世纪40年代的中叶,国外的采摘机主要以摇振式为主,这种采摘机适合于采摘胡桃、杏、枣和苹果等。大约于上世纪中叶,摇振式的采摘技术达到成熟,在各国的水果生产中得到了广泛的应用。这种采摘机的动力来源主要是拖拉机等机车。
而到了大约1960年,采摘机经过了进一步的发展成熟,摇振式的采摘机的动力来源和传动形式变得多种多样。其中有代表性的是:气动摇振机、惯性摇振机等。但是由于摇振式的采摘机固有的缺陷,这种采摘机容易损伤果实,所以并不适合于苹果这种需要运输、储藏的鲜果。同时期,为了提高采摘机的工作效率,国外也研制出了液压为动力的平台车,这种车可以实现升降并且配合采摘工人的适用采摘的工具。
从1970开始,对于水果采摘而言,国外不光研制水果采摘机,而且开始考虑果树的合理种植、修剪,使其更加利于采摘的机械化。在这一时期,切割式的采摘机应运而生。例如,日本研制出了一款适合于山地果园采摘任务的采摘机,这种采摘机重心较低、行走稳定,故而可以攀爬坡度较大的丘陵山地。
而随着第三次工业革命的兴起,计算机和信息技术也应用到了采摘机。几乎同一时期,水果采摘机器人的研究也如火如荼的开始了。世界上首台采摘机器人诞生于1983年。从这以后的几十年间,世界上的多个国家都成功的研制出了采摘机器人。由于采摘机器人更接近人工采摘,故而采摘机器人的使用范围更广,包括西瓜、菠萝、葡萄、苹果等。
例如,图1.1所示的番茄采摘机器人,是日本松下公司研究制造。这款采摘机的最大特点是可以在夜间工作,也就是可以24小时无间断工作,这就大大的提高了采摘的效率。

图1.1 番茄采摘机器人
1.3.2国内果园采摘机研究现状
不同于国外的相对于成熟的采摘机的研究,国内的水果采摘机的研究起步不久,成果较少。在水果采摘机研究伊始,也没有与采摘机械化相适应的大范围、规范化栽培的果园。虽然经过了10多年的努力,我国的果园采摘仍然没有达到机械化水平,更不要提采摘机器人的应用。最近几年,研制出的采摘机器人由于反应速度、识别率、采摘率等还有待提高,并不能走出实验室。
虽然国内的水果采摘机的起步较晚,但是发展速度较快。下面将就我国的果园采摘机的发展进行简要介绍:
我国的水果采摘机研究始于上世纪70年代左右。这一时期的研发成果主要以果园内的辅助机械为主,还没有达到自动采摘的水平。主要有手持式的采果器、振动式的采果机、气囊式的采果器。这些辅助机械适用于山楂、苹果等果实。虽然这些半自动化的采摘机能够较好的保护果实不被损伤,故而适用性较广泛,但是效率较低。
从20世纪80年代开始,国内出现了切割式的水果采摘机。水果采摘的机械化进程有所进展,在一部分的果园内实现了机械化采摘。这种发展的不平衡问题仍值得我们考虑,广大的果农是否能支付的起昂贵的采摘机的成本。
到了21世纪,近几年我国对于水果采摘机器人的研究也有一定的进展。有些研究机构也能制造出样机,但仍然没有成熟的产品能投入市场。
 如图1.2所示是我国自主研制的一种苹果采摘机器人,它的特点是机械臂的自由度较多,结构较为复杂。
如图1.2所示是我国自主研制的一种苹果采摘机器人,它的特点是机械臂的自由度较多,结构较为复杂。
图1.2 苹果采摘机
1.4本文主要研究内容
鉴于前人研究状况,本文设计的苹果采摘机整体方案较为简单,主要由采摘末端执行器和采摘机械臂两大部分组成,论文的主要工作如下:
(1)设计了末端执行器模块,包括切割装置,驱动切割装置的传动装置。
(2)设计了采摘机械臂模块由三部分组成:水平轴、垂直轴、连接板。其中水平轴连接末端执行器和连接板;垂直轴连接连接板和采摘机主体;连接板连接水平轴和垂直轴,是实现采摘机械臂上下和左右运动的核心部件。
(3)运用实体建模软件cero2.0进行了模型的建立;对苹果采摘机的虚拟样机模型进行仿真分析,包括建立虚拟样机,进行模型检验,由仿真结果得出:选择的伺服电机型号满足要求,苹果采摘机能够实现采摘功能。
第二章 苹果采摘机的机构方案
2.1机构介绍
现阶段,我国的苹果采摘机的研究起步不久,还没有大规模的进入市场,苹果采摘机的方案也没有规范可以遵循。本文中的苹果采摘机方案是在能实现基本功能的前提下,并依照结构简单、降低成本、易于制造加工的原则下构思并确定。
苹果的采摘方式多种多样,但是大致上可以分成以下两种形式:振遥式、机械臂采摘式。
振遥式:摇振式的采摘机技术比较成熟,在摇振时,需要多大的力度和角度,已经有规范可以遵循。而摇振式苹果采摘机的工作过程是:首先,在摇振力的振动下把果实震落,果实掉落在用布等柔性材料做成的网兜内,之后将树枝、树叶等清理掉。但摇振式的苹果采摘机有以下缺陷:首先,果树上的苹果采摘率较低,需要人工的第二次采摘,这就大大影响了效率;同时,苹果在掉落过程中,相互之间会有磕碰,造成果实受损,不利于鲜果的保存和运输。
机械臂采摘式:这种方式是在模仿人的劳动过程。首先,应用识别技术,采摘机对果实进行定位,并且判定其是否成熟。之后,采摘机的末端执行器或者通过抓取之后的扭转力,或者通过切割的方式,将果实采摘下来。这种采摘方式跟人工采摘相似,故而对苹果果实损伤较小。
为保证苹果不受损伤,本设计的苹果采摘机拟采用机械臂采摘式。苹果采摘机的设计核心就是机构部分的设计。本文主要是对苹果采摘机的机构部分进行设计。
苹果采摘机机构部分由末端执行器模块、采摘机械臂模块(包括水平轴、连接板、垂直轴三部分)两部分组成。
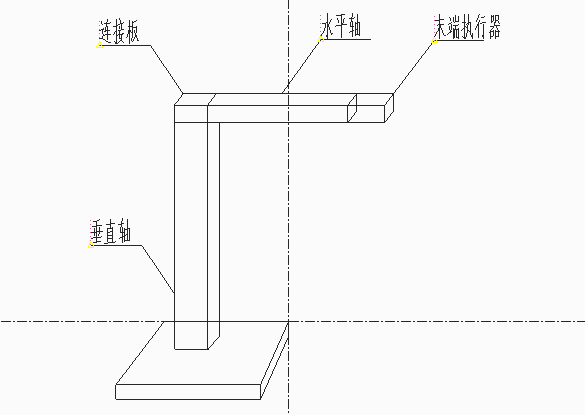 机构部分总体如图2.1所示。
机构部分总体如图2.1所示。
图2.1 采摘机机构方案总图
2.2末端执行器方案
末端执行器的主要功能是采摘果实,对于机械臂式的苹果采摘机,末端执行器主要有扭转式和剪切式。
扭转式:顾名思义,实现苹果与果树分离的力是机械手施加给苹果的扭转力矩。首先,机械臂实现机械手的定位,之后机械手以大小适中的力捏住苹果果实,机械手在伺服电机驱动下扭转,苹果果柄折断,实现果、树分离。但扭转式的末端执行器也就是机械手抓取苹果的力度很难控制,力度太小苹果抓握不稳,力度太大对苹果有损伤。机械手的造型设计也比剪切式的末端执行器困难。
剪切式:首先,机械臂实剪切装置的定位,之后剪切装置将苹果果柄剪断,从而实现果、树分离。这种方式主要有两个特点:首先,由于使用剪刀对苹果果柄进行切割,所以切割的力度容易满足,并且剪刀的动力来源灵活,既可以是人手的拉力,也可以是伺服电机驱动:其次,剪刀的设计建模相比机械手,更加简便,并且便于进一步的加工和制造。
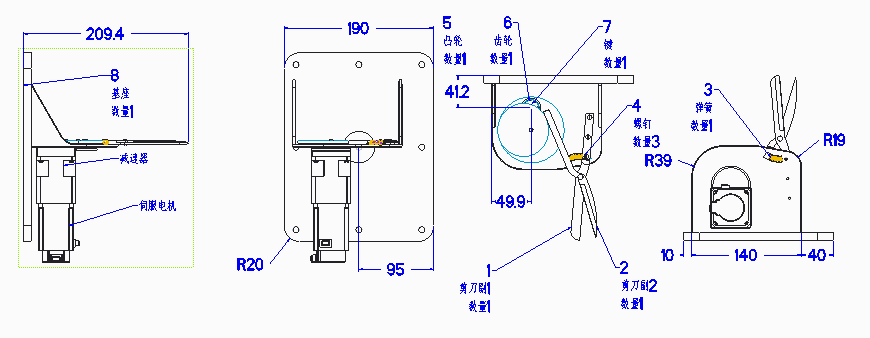
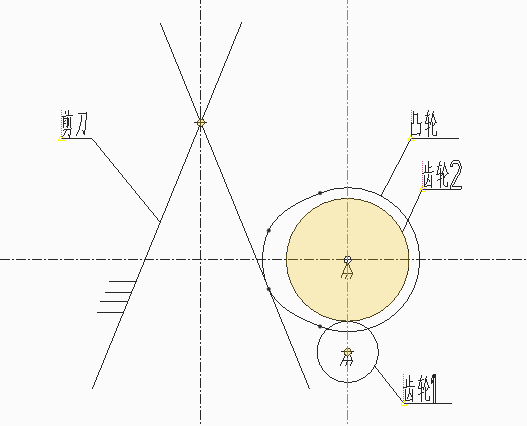 综上,苹果采摘机末端执行器的机构方案选择剪切式,动力由伺服电机驱动。末端执行器的传动方案如图2.2所示。
综上,苹果采摘机末端执行器的机构方案选择剪切式,动力由伺服电机驱动。末端执行器的传动方案如图2.2所示。
图2.2 末端执行器方案
2.3采摘机械臂方案
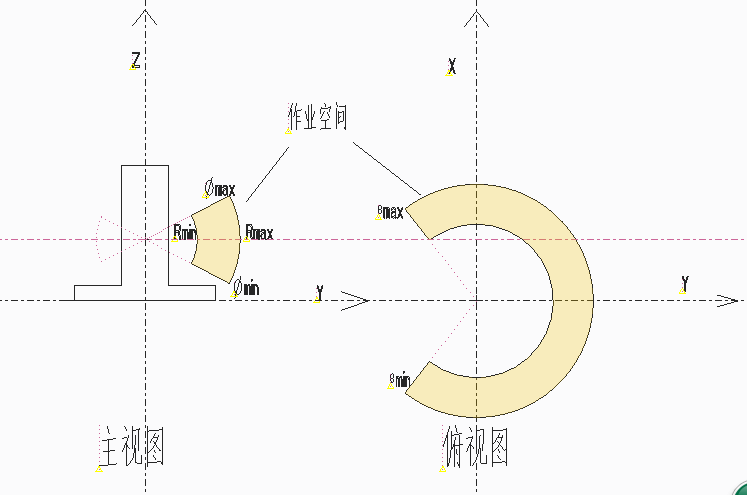
按照坐标方式,采摘机的机械臂方案可以大致分为直角坐标、圆柱坐标、极坐标三种形式。
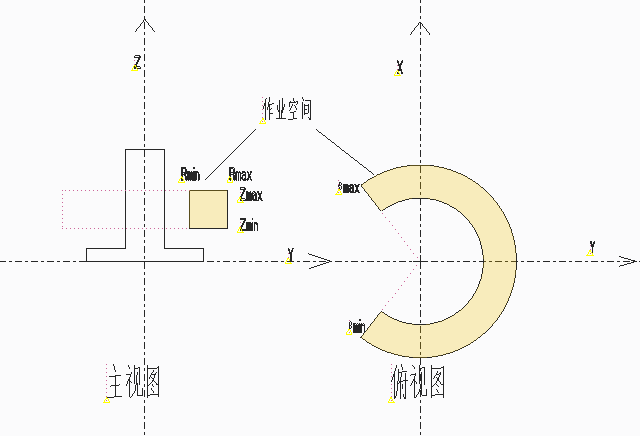
直角坐标式: 这种方式的采摘机由三个移动轴组成,并且三个轴空间内相互垂直。虽然自由度少,但末端执行器的定位精度高,这种机构的结构简单,作业效率相对较高。直角坐标方式采摘机的作业空间相对于极坐标方式的大,但是占地面积较大,并且灵活性相对较差。结合以上特点,直角坐标式的适合大范围、规范化栽培的果实。
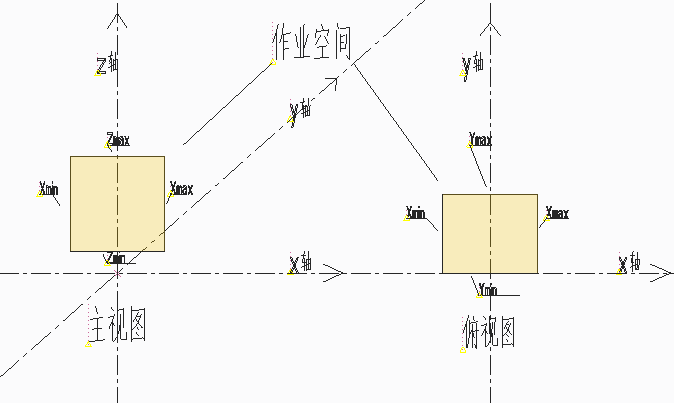 直角坐标式采摘机的作业空间如图2.3所示。
直角坐标式采摘机的作业空间如图2.3所示。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: