线性水动力荷载模型外文翻译资料
2022-07-18 22:46:57
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
2.4.2 对比其他水动力模型
我研究过在章节2.4.1中的现实的线性水动力荷载模型。但是其他的水动力公式都是照惯例的用于离岸范围上。最常见的两个方法就是频率领域表示法和莫里森表示法。
2.4.2.1 频率领域表示法
频率领域表示法是最与在我们课上和书上学习到的海洋水动力学知识最契合的。举个例子,频率领域表示法是在Ref.【22】和【74】中被强调最多的的公式,而Ref.【22】和【74】则是在海洋工程学科中最普遍的教科书。频率领域水动力问题利用了与现实的线性水动力方程相同的假设。尽管会有一些附加条件。入射波必须以单一的振幅、频率和方向传播(入射波必须还是规则波),而且平台运动必须随着入射波按照一个频率晃动。
2.4.2.2 莫里森表示法
莫里森表示法被广泛应用于有底部固定的离岸风涡轮机的分析。尽管有些应用错误,但它同样可以直接用于对岸上的浮式风涡轮机的分析。莫里森表示法与切片理论互相协调作用,可以直截了当的用来计算线性波荷载和非线性粘黏拖曳力荷载,大多是为了细长的垂直水面划割并且延伸至海平面的圆柱体。在水动力切片理论中,就像风涡轮机气态动力学中的BEM理论,结构被分成一系列的元素和薄片,这里的两个量纲的特性(在莫里森水动力中的附加质量和粘黏拖曳力因素)被用于计算出在结构上的所有三个量纲的荷载。
2.4.3 水动力计算步骤汇总
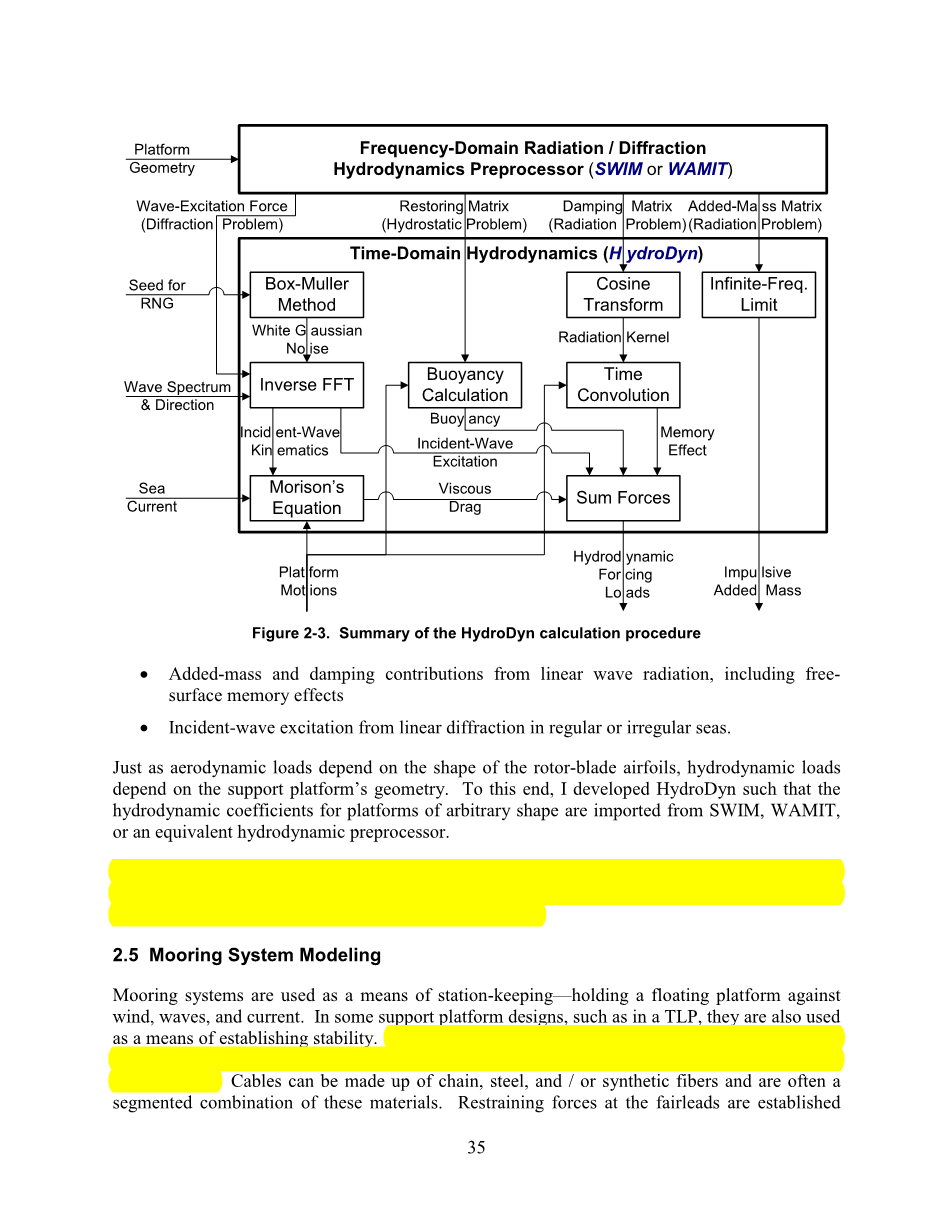
一系列的水动力方程的出现创造出了充满概念和方程的“奇幻森林”。在2.4.1和2.4.2章节中,我进入这片森林仔细钻研这些概念与方程,但是有时是很难透过树木去观察森林的。所以为了方便大家观察到这整片森林,我展示了将所有信息整合在一起的图表2-3.
总的来说,水动力解释了:
·线性水静力学恢复
·从入射波运动而来的非线性粘黏拖曳力,海水水流,平台运动
·附加质量和阻尼是从线性波辐射产生的,包括自由面记忆效应产生的。
·入射波激励是从在规律或不规律的海水中的线性绕射产生的。
就像气动力荷载要依靠转动叶片的螺旋桨的外形产生一样,水动力荷载也是依靠支撑平台的几何形状的。为此我研究了时域水动力学来使任意形状的平台的水动力因素能取自于SWIM,WAMIT或者与之相等的水动力预处理器。
水动力不是导致非线性陡坡效应和/或破碎波,VIV和冰海上的荷载的原因。他同时不能解释二阶干湿交替和二阶波浪漂移,缓慢漂移和总和频率激励。
2.5 锚固系统模型
锚固系统被用作帮助浮式平台抵抗风,浪和水流稳定住站台的一种手段。在一些支撑平台的设计中,比如TLP,它们同时被用于建立稳定性。一个锚固系统是由有一定数量的与浮式支撑平台导缆器连接处相接的和另一端锚固在海床的缆绳组成的。缆绳是由铁链,钢铁和/或合成纤维组成的,而且经常是它们这些材料的部分组合。在导缆器上的抑制力是由于锚固绳上的张力产生的。张力大小取决于支撑平台的浮力,在水中缆绳的重力,缆绳的弹力,粘性分离效应,和锚固系统的几何对称布局。为了适应不稳定的环境荷载,导缆器会随着支撑平台的移动而移动,而这时,在导缆器的抑制力也会随着缆绳张力的改变而改变。这意味着揽绳是有一定的顺应调节能力。
如果锚固系统顺应调节能力本来就是线性的,而且锚固惯性和阻尼可以忽略不计,那么从所有系泊揽绳(取自于Eq.)而来的附加在支撑平台上的总荷载就会是
此处的是线性化的重建模型的组成部分,且这个重建模型来自于系泊缆绳【之前在Eq.(2-24)提到的】而且是作用在处于固定位置的支撑平台上的整个锚固系统的第i个组成部分。对于悬链系泊锚绳,指的是在导缆器上的且来自于不在海底的揽绳的重量。对于处在中性浮力状态下的悬链式系泊锚绳,将会是零。对于拉紧的系泊锚绳,是当支撑平台没有固定位置时,从在水池里的多余浮力而来的预张力,包括了在水中的缆绳的重量的作用。是系泊锚绳的弹性刚度和由水下缆绳重量产生且取决于锚固系统的布局的几何刚度共同作用的结果。
但是通常上,锚固系统的动力学状态一般不能用线性关系表达。相反,非线性才是力与位移关系的常态。锚固的动力学通常包括了非线性滞后作用,此处的能量将会因为锚绳跟着支撑平台在平衡位置附近摇晃而消散。
因为我发现了SML的动态缆绳模组【50】与我的需求不匹配,所以我开发了准静态模块来模拟在浮式平台锚固系统中的非线性重建荷载。除了要对缆绳对接,我还将我的锚固系统模型与FAST和ADAMS进行对接。
我的模组还能够模拟一排同性紧绷或者松弛的悬链式系泊缆绳。它能说明在流体中的表面重量、弹性拉伸、每条缆绳在海底的摩擦,但是要忽略每条缆绳的弯曲刚度。不过因为我的准静态模组是完全与FAST和ADAMS相结合的,它也能说明整个锚固系统的非线性几何对称重建过程。通过“准静态”,我认为如果在已知给定任意时刻平台的导缆器位置,假设每根缆线处于静力平衡状态的条件下,我的锚固系统模块能计算出每个系泊锚绳内部的张力和配置。利用因流体力学在平台上产生的张力和附加荷载和因空气动力学在涡轮机产生的荷载,FAST或ADAMS解决了系统其余部分(平台、塔、机舱和叶片)加速运动的动力学方程。接下来,FAST或ADAMS将立即整合计算以在下一次的步骤中取得新的平台和导缆器位置,重复这个过程。
很明显,这个准静态方法也忽略了锚固系统的惯性和阻尼,这个锚固系统在不同的情况下可能会很重要,可能也没有多大作用。为了验证这个方法,我采用了在第三章节展示过的系统质量资料,来计算验证一个典型的锚固系统的质量是一个典型的涡轮机和浮式平台的总质量的百分之八。通过与航海设施工程服务中心的博士R.Zueck先生对话,锚固系统大约有四分之一的惯性对于浮式平台的动力学反应很重要。百分之八的四分之一就只是百分之二了,这表明了在分析这些涡轮机或者平台配置时忽略锚固系统的惯性是可行的。忽略锚固系统的阻尼也是一个保守的方法。
图表2-4是我的准静态锚固系统模型的计算步骤的平面图。在锚固系统里的每一条锚绳都被单独的分析了。用户必须细化相对于或固定在导缆器上的每条缆绳的导缆器位置和相对于或固定在惯性参考系的每条缆绳的锚位置。对于每条系泊缆绳,未拉伸的总和长度L、在水中单位长度的视重w、拉伸刚度EA,海底静态摩擦系数等必须考虑进去。因为每条缆绳都存在浮力,且w与单位长度质量有关,可通过公式计算:
系泊缆绳的特性
(L,w,EA,Cb)
系泊Xibolansheng系泊缆绳来自有道词典结果
tank
n. 坦克;水槽;池塘vt. 把hellip;贮放在柜内;打败vi. 乘坦克行进
点击可查看其他翻译结果,或修改结果
以下为该句多个翻译结果:
平台位置
锚固模型重建
计算锚绳的配置和张力 锚的张力
图表2-4 我的锚固系统模型计算步骤的总结
这里的rho;是水的密度,g是重力加速度常量,是锚绳的有效直径。由于我将模型制作成仅限用于模拟同性缆绳,所以我通过使用一个有相同的重量和刚度的加权平均值(重量依据每一节未伸长的绳索长度)的同性绳索来代替多节绳索(比如铁链,电缆和一系列的铁链段)。
每个系泊锚绳都是在以锚为原点的坐标系来分析的。这个坐标系的z轴是垂直的,x轴则定为从锚到导缆器的固定位置的水平段线。图表2-5详细说明了一个典型的锚绳分析。当锚固系统模型被用于求解支撑平台的位移时,模型首先将每个导缆器的位置从全球框架转换成本地系统来取得它相对于锚的位置,。
我充分利用了悬挂在两点的弹性锚绳的解析公式,悬挂在自己的重量(在液体中)。我推导了这个解析公式,它之后的步骤与之前在Ref.【22】展示过的类似,这里我就不在简述了。(不过这个推导并不是与它完全相同的,因为Ref.【22】并没有解释海床相互作用,也没有解释那些锚上的角度为非零的紧绷锚绳。)这个推导要有一个前提,那就是系泊锚绳的拉伸刚度EA要远远大过于锚绳在任何位置时的静水压力。在当地坐标系系统中,解析公式将会给出,依照拥有两个未知量的的两个非线性等式,这两个未知量对应为在导缆器上的的系泊缆绳的水平张力分量和垂直张力分量。(这个有效的张力被定义为实际的缆绳张力加上静水压力。)当没有任何部分的缆绳在海床底时,解析公式将为如下:
依照双曲正弦的逆推导,可以将公式(2-35)等价为:
公式(2-35)的右边式子的第一项为悬挂绳的弧长投影在x和z轴上(即使是紧绷的锚绳也会有类似悬挂绳那样的下垂)。公式(2-35)的右边式子的第二项为系泊锚绳在水平和垂直方向上的伸长。当临近锚的部分的锚固缆绳躺在海床底时,有两个未知量的等式的解析公式将会不同,
公式(2-37a)的右边式子的前两项为躺在海床底的系泊锚绳的未伸长的部分:
(2-38)
在公式(2-35)中为零。
公式(2-37a)的右边式子的包含的最后一项,对应于被静摩擦影响的的躺在海底的系泊锚绳的伸长部分。海床底的静摩擦可以被简单的理解为每单位长度的拖曳力。需要MAX函数解决在锚有或没有张力时的情况。详细的说,如果锚的张力为正时结果为零,因为海床底的摩擦力太小以致于不能克服系泊锚绳的水平张力;相反的,当锚的张力为零时MAX函数的结果不为零。当一部分躺在海床底的系泊锚绳长度足够让海床底的摩擦力完全克服系泊缆绳的水平分力时,这个情况将会发生。
在公式(2-37)中的剩余项在形式上与公式(2-35)类似,在各项的信息上相同。但是他们要比公式(2-35)更为简便,因为一条松弛的悬挂绳索总是会与海底触底点上相切。
在给定锚绳的特征值()和导缆器相对于锚的位置()的前提下,我的锚固模型系统运用了牛顿迭代法来计算非线性公式(2-35)和(2-37)中的导缆器上的有效张力。在牛顿迭代法中的雅克比行列式被用于求解在公式(2-37)和(2-35)中的解析偏导数。我的锚固系统模型给公式(2-35)和(2-37)定值时必须要被用作于计算步骤的一部分。公式的运算方式会有轻微的不同因为要避免一些数量问题(如当为零时,分母为零)。
我的锚固系统模型要使用从先前的时间步骤取得的作为之后的牛顿迭代法的初步假设。当模型开始运作时,我使用了初始量被记录在Ref.【79】中的:
和
这里的无量纲悬挂参数取决于系泊锚绳的最初配置:
注意公式(2-39)(2-40)与那些在Ref.【79】给定的值有些细微的区别,因为我的解析公式与注释不同。
一旦在导缆器上的有效张力得出,那么对在导缆器上的锚固缆绳上的有效张力的水平分量和垂直分量的定值将会很简单。(在图表2-5中描绘的蓝箭头就是在锚上的有效张力的水平和垂直分量—他们不是在锚上的反作用力。)从系泊锚绳的外力平衡可以很容易推导出:
和
当没有任何系泊锚绳躺在海床底时:
和
当有部分系泊锚绳躺在海床底时。尽管他们不会影响到浮式风涡轮系统的动态响应,但是锚的有效张力可以通过我的锚固系统模型计算出来而且从模拟中成为可用的输出。
然后我的锚固系统模型能解决系泊缆绳的配置和有效应力。重申一遍,这些参数的值并不会影响浮式风涡轮系统的动态响应,但是他们是从模拟中可用的输出。当没有任何一部分的系泊锚绳躺在海床底时,求解锚到锚绳上给定一点的水平距离x和垂直距离z的公式和求解锚绳上定点的有效张力的公式将如下:
这里的s指的沿着系泊缆绳从锚到定点的未伸长的弧长。公式(2-43)和(2-35)的相似之处很明显。与公式(2-37)类似,海床底相互作用力的公式会更加复杂:
正如图表2-4展示的,在我的准静态锚固系统模型的最后计算是对所有系泊锚绳施加在支撑上的总荷载的计算。也就是在公式(2-7)中的。这个锚固系统重建荷载可通过首次将导缆器上的张力从它的当地坐标系位置转变为全球位置并将所有系泊缆绳的张力总和时求得。
2.6 将所有整合
在近海的浮式风涡轮系统的先前研究和频率领域研究的缺点激发了我对能模拟完全耦合气态流体伺服弹性响应的模型的建模软件的开发。我通过对计算理论和陆地上的风涡轮和离岸的Oamp;G分析软件的杠杆作用开发了这项技术。
陆上风电工厂接受了AeroDyn[55,67]和MSC的快速[39]的气态伺服弹性涡轮模拟能力。ADAMS与A2AD[20,54]和AeroDyn之间的交互作用[48]和WAMIT[58],在离岸的Oamp;G工业中普遍使用。我通过开发模块来处理时域流体动力学(HydroDyn)和准静态锚固系统响应,建立了这些仿真能力之间的接口。图2-6总结了模块及其接口。
湍流风的流入由外部计算机程序TurbSim[36]规定,而确定性风流入(在图2-6中没有展示)是由外部计算机程序IECWind[56]规定的。以AeroDyn和ADAMS为例,对气动和重力载荷、控制和保护系统的行为以及风力涡轮机的结构动力学进行了研究。后者的贡献包括转子、传动系统和塔的弹性,以及支持平台的运动
全文共5617字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[9103],资料为PDF文档或Word文档,PDF文档可免费转换为Word



