紧凑型自主水下航行器的开发与设计:Zeno AUV外文翻译资料
2021-12-27 22:28:45

英语原文共 6 页
紧凑型自主水下航行器的开发与设计:Zeno AUV
J. Gelli1,2,A。Meschini1,2,N。Monni3,M。Pagliai1,2,A。Ridolfi1,2,L。Marini3,B。Allotta1,2,3
1佛罗伦萨大学 - 工业工程系(DIEF) 意大利,佛罗伦萨。电子邮件:a.ridolfi@unifi.it
2 海洋环境校际综合系统中心(ISME) - www.isme.unige.it
3 MDM 团队 S.r.l,佛罗伦萨大学分支,意大利,佛罗伦萨
摘要:本文介绍了一种应用于考古的紧凑轻型自主水下航行器(AUV)的机电设计; 该航行器被命名为Zeno(芝诺环境航海运营商),淡水和洪水灾民的保护者,是在欧洲项目ARCHEOSUb的框架内开发的; 并给出了AUV规范,导航设备和有效载荷。 描述了航行器的主要特征,特别关注其系统结构,推进系统和结构设计。 Zeno AUV目前正在组装中,其首次测试计划于2018年夏季进行。
copy;2018,IFAC(国际自动控制联合会)由Elsevier Ltd.主办。保留所有权利。
关键词:自主水下航行器,海洋机器人系统,水下文化遗产,水下机器人,设计工
1.介绍
新型紧凑型AUV(自主水下航行器)已在ARCHEOSUb(用于文化遗产发现保护和原位评估的自主水下机器人和传感系统)(图1中的标识)欧洲项目中开发。最近,对水下项目的兴趣以及专用于监测的AUV的发展正在增长(Allotta等人(2015b)),(Bingham等人(2010),(Johnson-Roberson等人(2017)).ARCHEOSUb项目的目标是紧接着前期完成的项目(例如ARROWS(2015),THESAURUS(2012))去开发产品和服务,以此来实现新的水下文化遗产遗址的发现以及对新的和现有的产品和服务进行探测,保存,保护和增强。在各种技术成果当中,正在发展1着一种紧凑的高性能AUV,能够在典型活动(ARCHEOSUb(2017))的所有阶段满足考古学家的要求。这项工作是由佛罗伦萨大学的工业工程部门和佛罗伦萨大学的官方衍生公司MDM Team S.r.l.共同执行的。与最常见的AUV不同,该航行器的设计具有更紧凑和更少的鱼雷形状(例如REMUS-100 AUV(Kukulya等人(2010)),Fograve;lagaAUV(Alvarez等人(2009)),SPARUS II AUV (Carreras等人(2015))和Matsya 5.0(Mittal等人(2017)))。
图1. ARCHEOSUb项目标识
本文介绍了有关名为Zeno(Zeno Environment Nautical Operator,图2中可见一个渲染)的AUV设计的工作,包括其机电组成,船用导航传感器和有效载荷,其安排如下: 第2节描述了项目所涉及的最终用户(主要是考古学家)的要求,最后是航行器的主要特征; 第3节涉及系统架构和电气硬件的设计和开发; 第4节重点介绍AUV推进系统; 第5节说明了结构设计工作的发展步骤; 最后第6节说明了针对海上首次实验测试的未来步骤。
图2. Zeno AUV渲染
2.用户要求
参与ARCHEOSUb项目的考古学家建议Zeno规范旨在满足未来的考古任务(在意大利和以色列)并基于终端用户以往的经验。航行器要求的特性如下:
- 可达深度:100-120米;
- 航行纵向速度:最大可达速度4 节,工作速度2 节;
- 最大航行速度:所有方向最高可达1.5节;
- 自主性要求:未充电可操作大约1小时;
- 重量:35千克,以便由两个人处理和轻松运输;
- 有效载荷:涵盖光学和声学;
- 灵活性:已搭建多种商业有效载荷的连接和外壳;
- 可用电压:24V,12V,5V;
- 尺寸:AUV必须小。
关于最后的要求,关于体长的第一个想法是它不超过1000毫米并呈现扁平形状;经过多次考虑并根据航行器规范(如自主性和要求的设备和有效载荷)以及合作伙伴建议,航行器保持在最大尺寸1000x800x200mm内。
表1. Zeno AUV的最终特性
|
名称 |
Zeno |
|
航行器种类 |
自主水下航行器 |
|
材料 |
铝和碳纤维 |
|
可达深度 |
100 米 |
|
电机数量 |
8 |
|
最大航行纵向速度 |
4节 |
|
工作航行纵向速度 |
2节 |
|
自主性 |
无需给电池充电可运行2小时 |
|
电源 |
14,8 V |
|
可用电压 |
24 V, 12 V 和 5V |
|
最大航行速度 |
1.5 节 |
|
尺寸 |
1000x800x200( 225天线)mm |
|
重量 |
35 千克 |
按照考古学家的要求,Zeno AUV的最终特征总结在表1中; 在航行器中选取包括导航和通信设备以及有效载荷的内容在表2中报告。在没有这些有效载荷的情况下,提供等效的重量以保证航行器的浮力。
表2. Zeno 自主水下航行器设备和有效负载
|
导航和通信 |
MEMS IMU(微机电系统惯性测量单元) 深度传感器 回声测深仪 全球定位系统 无线调制解调 无线网络 单轴FOG(光纤陀螺仪)(可选) DVL(多普勒速度仪)(可选) 声学调制解调器(可选) |
|
光学和声学有效负载 |
前置相机 垂直相机 照明器LED(发光二极管) 2D(平面)前视声纳 侧扫声纳 |
在不同的操作条件下(例如AUV模式或远程操作)是可以执行不同类型的任务的。 在遥控操作模式中,航行器可以通过脐带电缆向无线发射器浮标供电。在任何情况下,航行器的电源都由船用电池提供。当需要高导航精度时,航行器可以配备DVL(多普勒速度记录)和单轴FOG(光纤陀螺仪)。
3.系统架构设计
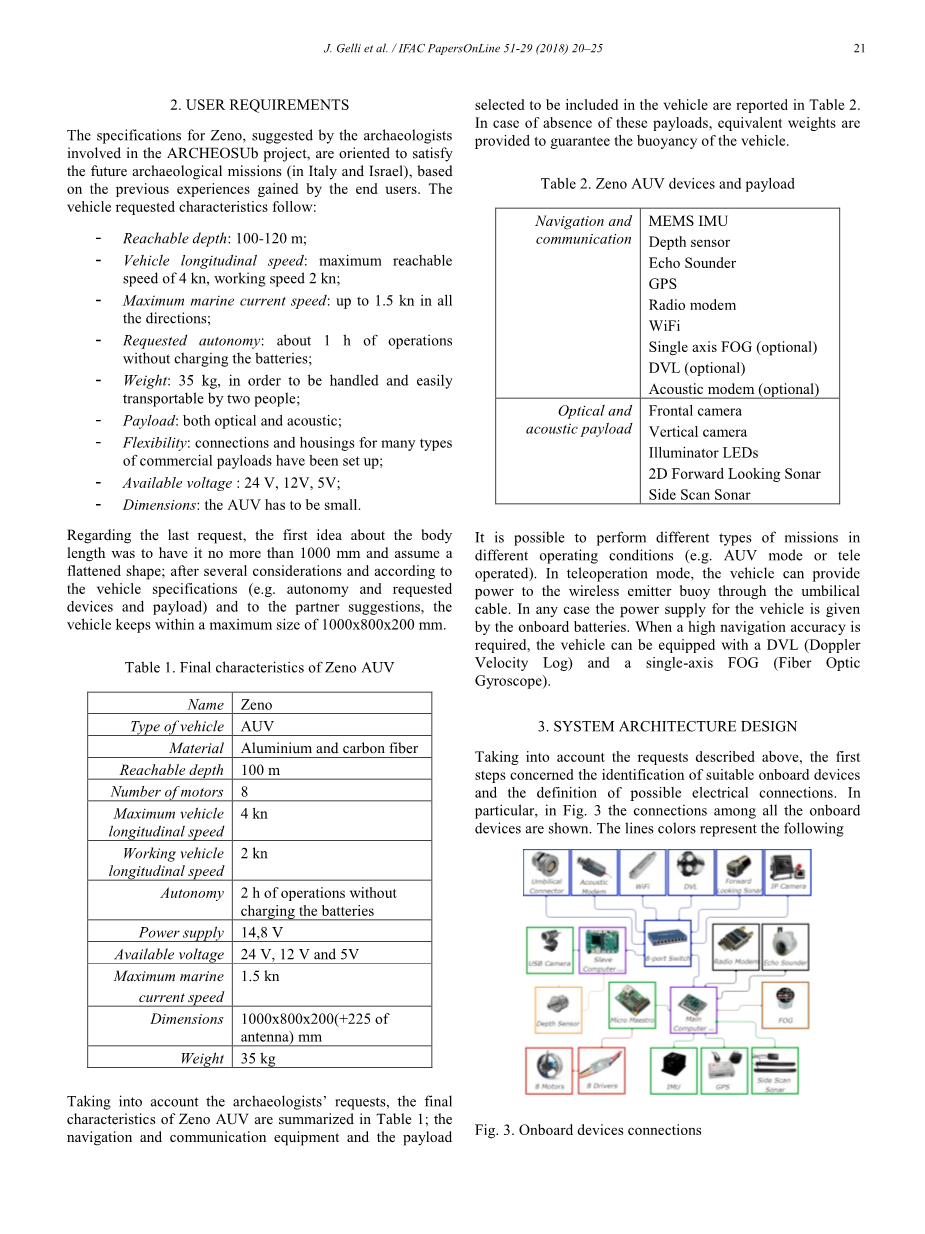
考虑到上述要求,第一步涉及适当船用设备的识别和可能电连接的定义。特别在图3中展示出了所有船用设备之间的连接。线条颜色代表以下连接:蓝色代表以太网,绿色代表USB,黑色代表RS-232,棕色代表RS-422,橙色代表I2C,红色代表伺服命令。
图3.船上设备连接
图文注释:
Umbilical Connector 脐带连接器
Acoustic Modem 声学调制解调器
WiFi 无线网络
DVL 多普勒速度仪
Forward Looking Sonar 前视声呐
IP Camera 互联网协议相机
USB Camera 通用串行总线相机
Slave Computer 下位机
8-port Switch 八端口交换机
Radio Modem 无限调制解调器
Echo Sounder 回声测深仪
Depth Sensor 深度传感器
Micro Maestro 微型大师
Main Computer 主机
FOG 搭载玻璃面板上的柔性电路板
8 Motors 8个发动机
8 Drivers 8个驱动器
IMU 惯性测量单元
GPS 全球定位系统
Side Scan Sonar 侧扫声呐
最初要求的AUV自主性约为1小时。为了评估其可行性,很有必要对所需的船用能量进行评估。考虑最简单的航行器配置,对所需功率的初步估计如下:对于活动PC约40W,推进250W,通信30W,应急设备,导航等;据此,必须考虑约300W或更多,即每小时任务需300Wh的能量。所选的电池模块由4芯电池,Tattu 22000mAh 14.8V 25C 4S1P Lipo电池组和NA插头组成。 325.6Wh的单个模块适合执行约1小时的任务。
图4.船用设备电源
各组分的电压值如图4所示; 由于电池的额定电源电压为14.8 V,因此引入了一些DC / DC(进行高低压直流间转换的装置)来创造其他电源。
图5. Zeno AUV内部布局(从上方看)
图文注释:
Battery Housing 电池外壳
Motors 发动机
Forward Looking Sonar 前视声呐
Main Housing 主外壳
Vertical Camera 垂直相机
Frontal Camera 前置相机
Echo Sounder 回声测深仪
DVL 多普勒速度仪
Illuminator LED 照明灯发光二极管
航行器部件布局的选择源于需要实现一种尽可能轻便和紧凑的航行器,同时满足其将要运行的所有装置和传感器的全部功能; 在图5中,展示出了Zeno AUV的最终内部布局俯视图,特别是可以看到电池组,主壳体,八个电动机和有效载荷。
在透明环境下电子装置外壳的内部布局,连接器和天线的细节如图6所示。主电子装置外壳和电池外壳是防水的。
图6.船用电子设备主壳体的内部布局
图文注释:
Main Electronics 主电子设备
Acoustic Modem 声学调制解调器
Antenna 天线
Custom Connector 固定连接器
Cable Glands 电缆接头
4.推进系统
推进系统已经被构想和开发以实现主动控制航行器的全部六个自由度(DOFs)(三个平移和侧倾,俯仰和偏航角),它由八个致动器组成:四个侧向推进器和四个垂直推进器。 由于适当的平衡,Zeno AUV在淡水和海水中的阳性率不超过0.5%,以减少必要的增加。
为了评估推进器的正确尺寸,T200 Blue Robotics,需要采纳开发过的前期项目的经验(Allotta等人(2015a)),(Allotta等人(2017))。 为了控制AUV的所有自由度,六个推进器是必要和充分的(Fossen(1994)); 但是由于以下原因,它被选择包括八个推进器:
- 关于航行器自由度的冗余,为了最大限度地自由控制倾转,俯仰和偏航,并保证悬停能力;
- 减小航行器的轴向尺寸:设计约束是使用四个推进器用于航行纵向截面的位移,其他推力器用于垂直位移。为了尽可能保持俯仰控制,如果仅使用一个垂直推进器,则必须将其精确地放在航行器重心的轴上,以避免俯仰和滚动运动未知的变化;由于存在2D前视声纳,DVL,前置摄像头和相关电缆,航行器将具有过大的轴向尺寸,因此放置两个或三个推进器。因此,选择四个垂直推进器时,相对于重心对称布置并位于中平面上,以给予航行器最大的机动性;
- 确保每个推进器相对于输入和输出水流处于最大位置清晰/自由,避免流动不良引起的动能泄漏来最大化其效率(Carlton(2007))。因此,四个矢量推进器(横向推进器)尽可能位于外部,同时保持有限的尺寸;
- 为了满足考古学家的要求,即使存在不可忽视的海流,考古学家要求尽可能以最大功率在所有作业条件下工作。
5.结构设计
图7. Zeno AUV内部透视图
Zeno AUV的当前内部形状如图7所示。三个主要结构部件是防水电气外壳,防水电池模块,两者均采用Al Anticorodal型6082 T6和采用碳纤维的主框架。浮力泡沫在闭孔PVC(聚氯乙烯)泡沫塑料中,位于碳片之间和壳体周围(图7中褐色部分);此外,在航行器中设置了其他可能的浮力元件的连接点。资料编号:[3296]



