四轮独立驱动电动汽车的横向和纵向运动协调控制外文翻译资料
2021-12-18 22:59:10
英语原文共 9 页
四轮独立驱动电动汽车的横向和纵向运动协调控制
摘要:对于四轮独立电动车电动车,可通过分配四轮电动机的驱动力和再生制动转矩来控制车辆纵向和横向运动。为了满足驾驶员操控需求,并且保持车辆横向稳定性,本文提出了一种分层控制系统。在上层,运用了非线性模型预测控制,以解决非线性多输入多输出,过驱动问题。该控制器基于具有非线性轮胎模型的非线性三自由度模型,将轮滑作为虚拟控制输入。在底层,车轮轮滑动通过PID控制器操纵,以产生独立电动机的驱动和再生制动转矩。所提出的控制器在具有四种典型工况的硬件在环系统中进行了测试,包括恒速,加速,减速和低路面附着系数四种情况情况,以模拟不同的驾驶员命令。结果表明,能够满足驾驶员的纵向和横向运动控制要求。
关键字:车辆运动控制,非线性模型预测控制,四轮独立驱动车辆
一、前言
车辆纵向和横向运动控制与车辆操纵和稳定性有关。车辆纵向运动由动力系统和制动系统控制,其关键因素是扭矩/驱动力控制。例如,在加速情况下,动力系统控制器根据加速踏板传感器信号决定输出转矩。横向运动控制要复杂得多。在正常情况下,它由驾驶员转向命令控制。但是,在侧偏角大,横摆角速度大的危急情况下,应通过主动安全控制系统操纵横向运动,否则车辆会失去稳定性。一个众所周知的主动安全控制系统是ESC(电子稳定控制系统),其已被证实可以防止无数次事故并挽救无数生命。对于发动机驱动的车辆,ESC的一种常见方法是通过差速制动器根据车辆状态产生额外的横摆力矩以调节车辆横向运动。虽然它是一种操纵车辆横向运动的有效方式,但它也会干扰车辆的纵向运动,因为额外的制动力使车辆减速的同时,车轮滑动量大,这使得驾驶员失去车辆纵向运动的可控性。除了被动的和不舒服的减速之外,它还可能在某些特定的交通情况下引发潜在事故。
基于动力传动系特性,通过分配四轮独立驱动车辆每个车轮的电动机转矩,可以改善上述车辆运动控制的缺点。4WIMD电动汽车最近引起了很多关注,其包括轮毂电机驱动和轮边电机驱动。独立驱动和再生制动,可以提高车辆的能效和操控性能,特别是对于车辆动力学稳定性控制。虽然独立电机驱动车辆有许多好处,但车辆运动控制仍然很复杂。第一个问题是车辆动力学的非线性,包括车辆纵向,横向和横摆动力学的耦合,以及非线性轮胎的纵向和横向特性。第二个问题是所谓的过度驱动问题,因为四个控制输入(四个车轮上的扭矩)大于要控制的状态。因此必须根据指工况分配扭矩。
为解决上述控制问题,独立车轮电机驱动车辆的运动控制系统可大致分为两类。第一种是分层结构,其中控制器通常设计为两层。上层是用虚拟控制输入控制车身动力学,例如纵向力和横摆力矩。下层是将这些虚拟控制输入转化为四个车轮上的扭矩。在文献10中,上层控制器是基于线性单轨车辆模型设计的,用于跟踪参考横摆率并使侧滑角为0。在文献14中,上层控制器由三部分组成,它们是从多维查找表确定的静态前馈控制器,使用线性单轨道模型的动态前馈控制器和PID形式的反馈控制器。在文献15中,上层控制器是一个考虑模外动态和干扰的滑模控制器。在文献16中,MPC(模型预测控制)控制器应用于基于线性车辆模型的上层实现,其中横向速度,横摆率,偏航角和最大车轮滑移作为模型状态,并且纵向力,横向力和横摆力矩的调节作为控制输入。上述所有参考文献都设计了下级控制器,通过优化将横摆力矩分配给电机转矩,以最大限度地减少控制工作量并同样利用每个轮胎的附着力。比较分层控制结构,另一种控制器直接用线性或非线性车辆动力学模型计算扭矩。在文献17中,基于以横摆力矩作为控制输入的LPV模型设计了鲁棒增益调度Hinfin;。在文献18中,面向控制的模型包括非线性轮胎模型和车轮滑移动力学,MPC用于计算电机转矩。然而,因为车轮分别同时驱动和制动,车轮打滑源于制动情况,并且不适用于4WIMD车辆控制。对于上述两种结构,通常简化了为控制器设计的车辆动力学模型。特别是,对于轮胎模型,可以考虑线性模型或仅考虑横向特征模型。众所周知,线性模型仅仅适合于在小的车轮滑移和滑移角下的纵向和横向轮胎工况。线性模型恰好适用于纯纵向和纯侧向轮胎情况。在车辆转弯情况下,轮胎处于组合状态,其中轮胎侧向力也受到纵向车轮滑移的影响,纯侧滑非线性模型不再准确。
本文利用4WIWD电动车,在极限转弯工况下,四个电动机可分别同时控制制动和行驶模式,调整车辆动力学,设计了一个协调的纵向和横向车辆运动控制器。跟踪参考纵向速度和参考横摆率。为便于比较,发动机车辆的侧偏稳定性控制可采用差动制动或主动差动两种方式。该控制器是分层的。上层设计用于控制纵向速度和横摆角速度去靠近标准。与文献10、14-18不同,该控制模型具有高度非线性,耦合了车身动力学和轮胎非线性模型。考虑了轮胎纵向力和横向力之间的非线性关系和约束。为了合理解决4WIMD电动车的动态特性,当各个电机处于制动和驱动的时候,控制系统为其选择合适的模式,车轮滑动作为虚拟控制的输入,避免了车轮滑动模型在制动和驱动之间来回切换。该控制器采用非线性模型预测控制(NMPC)方法,解决了具有非线性和过驱动的控制问题。对于NMPC来说,最重要的问题是其在实时应用非线性优化中的计算复杂度。本文选择并使用了一种实时可实现的NMPC算法。由于MPC的广泛应用,一些实时MPC算法和工具箱已经开发出来,应用范围从缓慢的化工过程控制到快速的实时控制。著名的显式MPC及其相关的多参数工具箱(MPT)离线计算显式控制器(分段线性型),通过在线检查表计算控制输入,使其实时工作。但该方法需要将非线性控制模型转换为分段线性模型,这就需要大量的存储空间来节省显式控制器。此外,在车辆动力学控制中,纵向速度和横摆角速度的追踪是一个跟踪问题。显式MPC要求用户预先设置这些引用区域,这将增加控制性能的稳定性。还有其他实时MPC算法,如mu;AO-MPC, jMPC工具箱,等等。在比较了一系列实时MPC算法后,选择了GRAMPC算法。该算法用C语言编写,采用高效的投影梯度算法和自适应线性搜索策略,适用于非线性系统,在高性能的嵌入式系统中,在线非线性优化可以在毫秒内完成。该控制系统的下层是利用前馈控制器和反馈PID控制器控制车轮滑动,跟踪虚拟控制输入。在硬件在环(HIL)仿真中对所提出的控制系统进行了评估。
本文结构如下。第二部分介绍了用于控制器设计的非线性车辆模型和轮胎模型。第三部分介绍了车辆动力学控制器。第四部分介绍了HIL仿真平台,并讨论了在几种情况下基于仿真的控制性能。第五部分为结论部分。
二、面向控制的车辆和车轮动力学模型
在车辆纵向和横向运动控制系统设计中,需要以电机力矩为输入,以车辆状态为输出的控制模型。在本节中,控制模型的描述分为三个部分。
A.非线性车辆动态模型
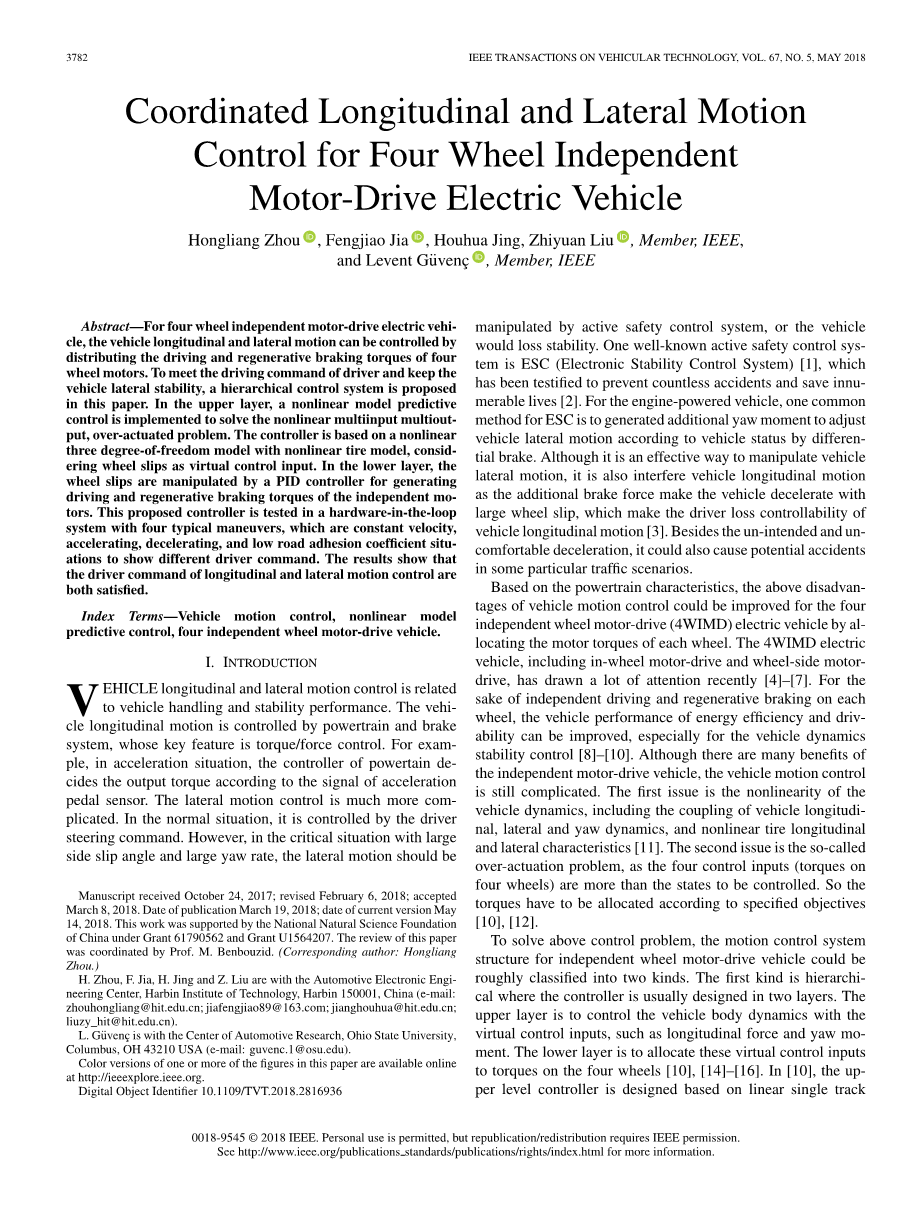
车辆纵向、横向、横摆动力学,忽略俯仰、横摇动力学,4WIMD电动汽车模型如图1所示。该模型为3自由度(DoF),vx、vy和r分别为车辆的纵向速度、横向速度和横摆角速度。Fxi,Fyi,alpha;i(i=1,2,3,4)是轮胎纵向,横向力和车轮侧偏角。delta;是前轮转向角,beta;是车身侧偏角。lf、lr、d分别为前轮轴、后轮轴到车辆重心的距离和车轮的距离。非线性车辆动力学模型如式(1)所示,其中m为车辆质量,Jz为车辆横摆惯性矩。
B.车轮动态模型
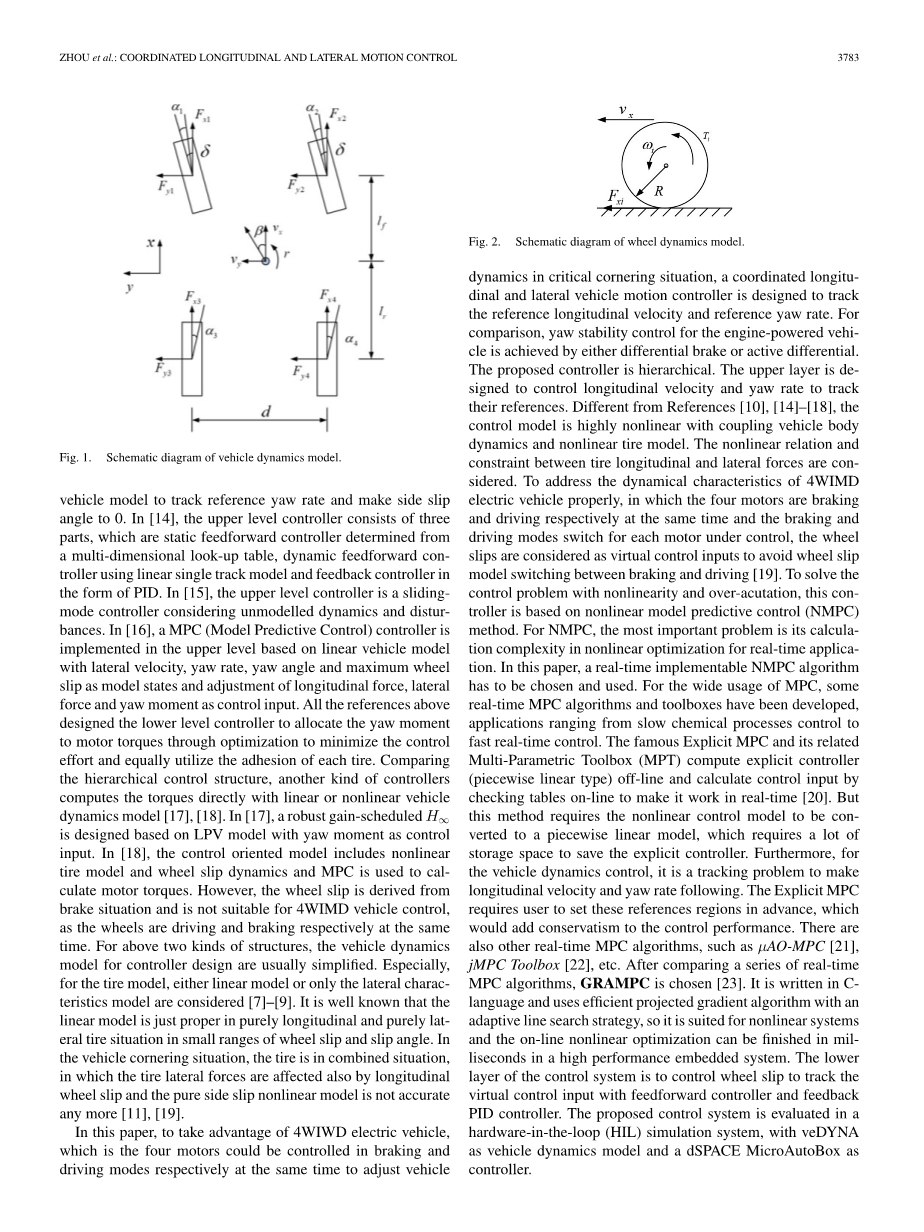
车轮动态图2所示和特征曲线为(3),omega;i (i=1,2,3,4)是车轮转动速度,R为车轮有效半径,Jw是车轮转动惯量,Ti电动机转矩(Tigt;0时为电动机驱动转矩,Tilt;0时为电机再生制动转矩)。
在(3)式中,Fxi取决于车轮纵向滑动,式(4)计算得到。当电机在驱动模式下,and 。当电机在再生模式下,和。
C.轮胎非线性模型
众所周知,轮胎是高度非线性的,有许多模型来描述它的非线性。其中大部分都不适合控制器的设计。例如,著名的Magic轮胎公式是一个半经验的轮胎模型,它的精度很好,但是它太复杂了。Magic轮胎公式及其变化在车辆动力学仿真中得到了广泛的应用。Dugoff轮胎模型是另一种基于曲线拟合的经验模型,但该模型是根据车轮情况进行切换的,因此仍难以用于控制器的设计。本文选择的轮胎模型是Burckhardt轮胎模型,它也是一个经验模型,描述了纯轮胎滑移和复合轮胎滑移情况下的非线性和约束。轮胎纵向和横向力由式(5)计算,其中Fti为纵向和横向力的组成,Fzi为轮胎的竖向荷载,c1、c2、c3为参数。sRes为组合摩擦效率,由式(6)计算。
纵向力和横向力计算为(7),当最大横向力小于正常轮胎纵向力时,在横向力上加系数ks(0.9~0.95)。为详细介绍Burckhardt轮胎模型,图3为组合胎面滑移情况下的纵向力和横向力,干沥青路面Fzi=3650N,c1=1.2801,c2 =23.99,c3=0.52。
三、协调纵向和横向运动控制系统
A.控制对象
对于常规车辆,纵向运动控制和横向运动控制分别用于驱动/制动控制和稳定性控制。最重要的车辆横向运动控制系统是横摆稳定性控制,简称ESC。为了保持车辆转弯时的稳定性,当车辆的横摆动力学不能遵循驾驶员的转向指令时,就会启动横摆稳定性控制动作,即转向过度或转向不足状态。对于传统的发动机动力总成车辆,横摆稳定性控制采用差动制动实现,如下图所示:
1)转向不足情况:制动前轮和内后轮,降低发动机扭矩,增加车辆横摆角速度。
2)过度转向工况:制动前轮(外前轮制动扭矩大于内前轮制动扭矩),降低发动机扭矩,降低车辆横摆角速度。
当一个或多个车轮制动和发动机扭矩降低时,车辆迅速减速。在大多数情况下,这是一种能够接受的方法,使车辆脱离不稳定工况。然而,在某些特定的场景中,它是危险的。例如,如图4所示,在繁忙的高速公路上,当启动差速器制动,以避免前面有障碍物时,标记为a的车辆会被旁边车道上标记为B的高速车辆追尾。发动机车辆和只有一个电机的电动车是无法避免的。
利用电机转矩分布式控制的优点,车辆纵向和横向运动的协调控制可以在4WIMD车辆上实现,满足了驾驶员纵向和横向操控的物理极限。这就是本文提出的控制系统的目标。
为了实现上述控制目标,首先要设计车辆的纵向和横向运动基准。对于纵向运动控制,传统车辆纵向运动控制是基于动力总成输出扭矩的。近年来,随着交通信息的不断丰富和智能车辆的不断发展,一些基于速度分布的纵向控制系统应运而生。根据技术发展趋势,本文的纵向运动控制是通过控制车辆来跟踪预定的速度曲线,由加速度踏板传感器和车辆状态得到如图5所示。动力系统图是根据动力系统参数和驾驶性能要求进行标定的。参考速度vxr的计算是基于输出扭矩、车辆参数和电流速度。
在车辆横向运动参考中,选择横摆角速度作为车辆转弯速度的指标。参考横摆角速度rr由速度和转向角计算,如式(8)所示,其中rd和rmax分别为无约束参考的横摆角速度和最大横摆角速度,如式(9)和式(10)所示。rd计算的是车辆线性单轨模型的稳态,该模型仅考虑轮胎侧向力与线性模型,因此4WIMD电动汽车与发动机驱动汽车的rd值近似为。
Cf和Cr轮胎侧向刚度,mu;是道路附着系数, g是重力加速度。由式(9)可知,rd受线性轮胎侧力模型参数cf和cr的影响。通常有两种方法进行测试和计算:
1)从车轮滑转的小范围角度考虑, Cf和Cr的偏导数alpha;i供参考,在图6的橙色线表示。
2)考虑车轮滑移角的大范围,得到Cf和Cr为Fyi从最小到最大的斜率,如图6中的黄线所示。
如图6所示,上述两种方法得到的轮胎侧向刚度系数相差较大,分别为1.45times;105N/rad和2.97times;104 N/rad。为解决轮胎侧向刚度系数变化对参考横摆角速度的影响,两个转弯情况(delta;=10°和delta;=5°)与车辆参数选择计算rd低频=1.45m, lr=1.51mm=2100公斤,vx=80km/h,如右所示的图6。这些参数是从典型的电动汽车中选取的。虽然Cf和Cr在很大范围内(接近5倍),但每种情况下的参考横摆角速度是相似的。本文采用上述两种方法中Cf和Cr的平均值。
备注1:除了横摆角速度,许多论文还针对车辆横摆稳定性控制beta;或稳态线性单轨车辆模型。beta;是一个关键的车辆状态指示指标,beta;太大表示车辆转向过度,在r太大表示车辆滑移。但这是结果,而不是原因。根据车辆运动学 ,其中 是惯性坐标下的横向加速度,受限于mu;g,得到。考虑(9)和(10),r<s
资料编号:[4545]</s



