自主帆船的建造与控制外文翻译资料
2021-12-14 22:48:49

英语原文共 12 页
自主帆船的建造与控制
Henning Seeberg Stenersen
*挪威科技大学工程控制论系,挪威特隆赫姆NO-7491
(电子邮件:henning.stenersen@gmail.com)
摘要:一艘小型自主帆船已经被成功设计,建造和测试了。只需使用风帆作为推进力,它就能够在没收有来自用户的进一步输入的情况下航行可行的预定轨道。航海物理学通过 导航,控制和指导来驯服。该船配备了灵活而强大的硬件,可用于计算机控制。该硬件收集测量值,运行执行器并执行高级和低级控制算法。一个帆船的控制分配方案已经被提出了。该计划确保在所有可行的航行点上取得进展,并且已经被证明在测试中是有效的。控制器使用该方案来关闭航向环路,然后通过航点跟踪器关闭位置环路。
关键词:自主航行,自主控制,嵌入式系统,路径规划,传感器,自动移动机器人,自动驾驶汽车。
1.引言
与无人机,ROV或AUV等现场机器人相比,机器人航行领域的研究很少。根据世界机器人帆船锦标赛(2014年世界机器人帆船锦标赛),还没有人设法用帆船机器人穿越大西洋。 2011年,据称科学出版物(Stelzer和Jafarmadar。(2011))没有很好地涵盖自动帆船装饰。
然而,近年来,对现场的几个方面进行了一些研究,如:硬件设计,系统开发,碰撞避免,路径规划,钻机设计,控制器,建模,稳定性和电源管理(Alexander Schlaefer(2011),Finnis) (2012),Fabrice Le Bars(2013))。许多自主帆船的原型存在于那里。这些原型使用各种各样的船设计,被使用的帆船和控制系统设计。
将规则和常用说法从水手转移到控制器的想法并不是一个新想法。 Abril J.(1997),Stelzer R.(2007)和Y.Briere(2009)已经尝试使用模糊控制器来实现这些规则。
这些都做了真实的实验,显示了工作成果。该过程中的控制分配方案也是基于航海实践的经验,但该方法与模糊控制器不同。本文提出的工作首先是个人,被视为一个有趣,具有挑战性和相关的需要解决的问题。以前的工作已经在(Stenersen(2015))中进行过。然而,自主帆船可能有一些有趣的应用。一艘自主帆船可以被建造,不仅可以利用风作为推进力,而且可以为其内部系统获取能量。因此,它可以完全自给自足,并且没有人员成本。它甚至可以携带其他自动驾驶车辆并为其提供能量,例如飞行无人机。在未来,我们可能会看到自主帆船用于岸上检查,监视和海岸警卫任务,冰山探测,科学数据收集等。
主要贡献是:
bull;设计和建造小型帆船,配备必要的硬件,以便在相关条件下进行自主航行测试。
bull;设计,制作和启用计算机框架,以便:
·收集,记录并提供应用程序所需的各种测量。
·执行高级控制算法,并为此类算法提供可读和模块化的实现环境。
·与智能手机用户界面互动,可以高效地测试和运行系统。
bull;建议采用控制分配方案,确保所有可行航行点的进度和可控性,仅使用风帆作为推进力。
bull;建议用于自主航行的简单控制算法。
bull;基本自主航行的多个现场测试被成功实现。
2.嵌入式计算机控制
在开发过程中,计算机化的硬件框架被实现了。计算机化硬件的开发考虑了以下标准:
bull;为航行/导航/等运行各种高级控制算法。需要更高的计算能力。
bull;启用运行各种易于实时要求的低级控制法则。
bull;以模块化,灵活和可扩展的方式管理各种传感器和执行器。
bull;允许运行时用户输入。
bull;在实时和后期操作中为用户提供性能结果。
bull;保持运行并安全运行。
2.1实现
图1.最终系统概述
为了满足系统要求,决定使用运行通用操作系统的高级计算机。因此,高级软件可用于加速控制算法的实现。为了实现模块化,可维护和可扩展的系统,执行器和传感器作为内部总线上的节点连接。主计算机将充当控制其他节点的主计算机。图2显示了该设计的设计概述。用户通过无线用户界面与系统交互。
该系统是通过使用Raspberry-Pi计算机实现的,该计算机具有称被为Rasbian(Raspberrypi)的通用Linux发行版。 Raspberry-Pi计算机通过CAN总线(CAN总线)进行了扩展。这是通过铣削包含MCP2515 CAN驱动器芯片(Microchip)的电路板,将其连接到Raspberry-Pi并为CAN总线功能编写驱动程序来完成的。驱动程序是被作为解释的编程语言Python中的模块安装。
为每个传感器或致动器实现一个物理节点变得有些麻烦。因此,基于强大的微控制器将基本传感器和执行器组合成单个物理节点被认为更好。
图2.设计概述
足够的输入/输出/外围设备。这将成为ATmega2560微控制器(Atmel)。每个传感器和执行器仍然会显示为CAN总线上的不同节点。 因此,系统仍然可以扩展,因为还可以连接其他物理节点。
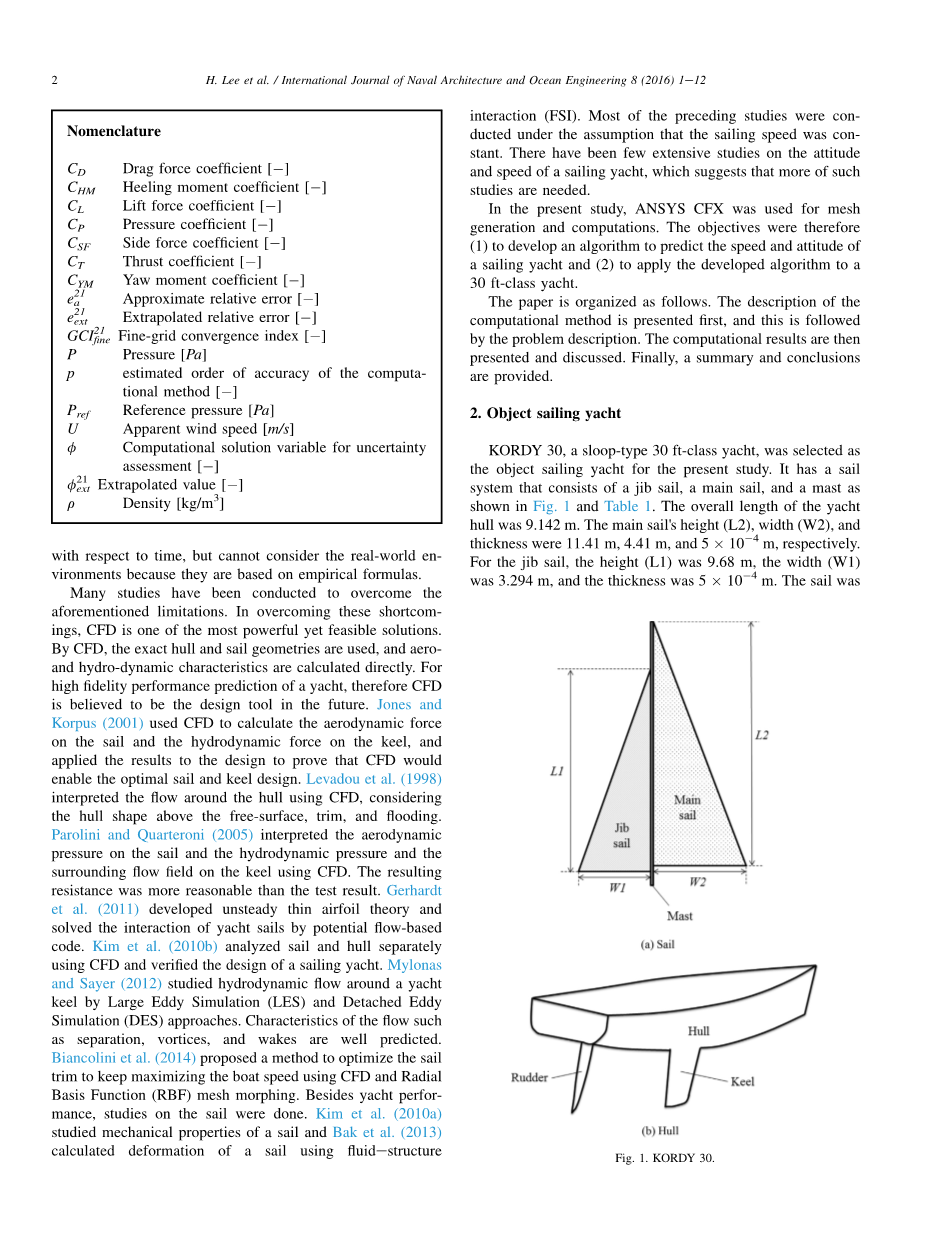
为了获得ATmega2560上共享资源的模块化实现,基本调度通过在其上修改freeRTOS的端口(FreeRTOS)来实现。这需要更多的数据存储器和外部RAM。 图1显示了最终系统概述,物理及其显示方式。
3.导航
该船配有加速度计,磁力计,GPS和风向传感器。这些仪器一起提供滚动,俯仰,航向,位置,速度,航向和风向,以用于控制算法。
3.1滚动和俯仰
加速度计通过假设测量的力矢量等于重力矢量来提供滚动和俯仰的估计。由于帆船不会受到快速加速,因此该假设适用于该应用。
3.2标题
标题通过校准的磁力计读数获得。通过实施校准程序以消除静态硬铁和软铁干扰以及比例因子误差。然后得到的校准的场矢量被旋转到NED帧中,并且获得航向如下:
psi;=2pi;-atan2(XcalRot,YcalRot),(1)其中psi;是航向,XcalRot,YcalRot分别是北方向和东方向的磁场分量。
过滤航向测量是为了滤除plusmn;2-3°的噪声分量,低通滤波器通常被考虑使用。然而,相位滞后变得太大,从而自适应滤波器便以下列方式设计了:
图3.应用于标题样本(红色)的标题过滤器(绿色)。
滤镜的alpha值如下所示为蓝色。黑线是静态低通滤波器,alpha;= 0.05,缓慢收敛到航向滤波器。
Delta;[k] = circularDist(psi;[k-1],psi;)(2)
alpha;psi;,var [k] = sat(beta;(|Delta;[k] |-Delta;thres),[0,alpha;psi;,max - alpha;psi;,min])(3)
alpha;psi;[k] =alpha;psi;,min alpha;psi;,var [k](4)
gamma;=alpha;psi;[k](psi;[k-1] Delta;[k]) (1-alpha;psi;[k])psi;[k-1](5)
psi;[k] =圆形图(gamma;),(6)
其中alpha;psi;,min = 0.05和alpha;psi;,max = 0.9分别是最小和最大平滑因子。 Delta;thres= 4是用于增加平滑因子的阈值,相对于测量值和滤波值的差异。 |Delta;[K] |是Delta;[k]的绝对值。 beta;= 0.1决定平滑因子增加的斜率。请注意,高平滑因子意味着较少的平滑。 sat(a,b)将饱和度返回到范围b。
在图3和图4中,过滤器在样品组上被进行测试。很明显,在航向的大而快速变化期间相位滞后较低,但当航向变化较小时,平滑度仍然很高。样品组是通过台架测试被生成的,但过滤器在现场测试中显着降低了执行器抖动。
图4.与图1中相同的标题样品和过滤器
图5.风向传感器和GPS外壳组件
3.3风向
相对风向omega;rel是通过读取位于桅杆顶部的fi的角度获得,参见图5。
3.4位置,速度和过程
位置,速度和航向只需直接从GPS模块获得。
4.控制
4.1控制分配
控制分配是将控制力或力矩转换或映射到执行器的设定点的动作。因此,最低级别的控制器朝向设定点运行致动器,并且与工艺相结合,使致动器产生所需的力和力矩。
图6.执行器角度
图7.使用迎角设置所需的航行角度
根据图6,风帆角度Lambda;和lambda;确定主帆和热那亚风帆的设定点角度。更高级别的算法对Lambda;和lambda;本身几乎没有兴趣,而对产生的升力有兴趣。升力取决于迎角alpha;,因此我们将Lambda;和lambda;定义为:
Lambda;=lambda;=omega;rel - alpha;isin;[0°,90°]。 (7)
alpha;没有明显的选择。最佳alpha;值取决于风速,钻机配置和其他变量。因此,alpha;值仍然作为可用于现在通过用户界面进行实时调谐的调整参数。测试表明,如果风速发生显著变化,则只需要更新alpha;值。
风帆力矩和舵角度更高级别的控制器将要求一定的控制力矩,这反过来使船只收敛到所需的航向。有两个可控组件可以产生这样一个时刻:
bull;舵角
bull;主帆和热那亚产生的力量不同
在传统航行中,方向舵仅用于精确调整航向。最大的时刻是通过调整风帆来设定的。实际上,方向舵在风力冲浪板上可以被完全省略。因此,绘制理想的时刻应该涉及主要和热那亚航行角度的改变。因此,力矩映射功能应包括主帆和热那亚航行角度贡献;分别为Lambda;moment和lambda;moment。
以下列方式改变新的航行角度以适应这种情况:
Lambda;tot=Lambda; Lambda;momentisin;[0°,90°](8)
lambda;tot=lambda; lambda;momentisin;[0°,90°](9)
图8.帆时刻图。绿色箭头表示风向。
在下文中,一种方案被建议用来获得Lambda;moment,lambda;moment和舵角delta;:假设期望的时刻给出为:
Ndesisin;[-1,1],(10)
其中Ndes是没有单位的虚拟时刻。建议的时刻图如下:
delta;= Ndes / 2(delta;max - delta;min)(11)
ǫ= abs(Ndes) - abs(Nsail阈值)isin;[0,1](12)
starboardTack =not;true,如果omega;relisin;[0°,180°]
starboardTack =not;false,如果omega;relisin;[180°,360°](13)
Lambda;moment= xor(starboardTack,isPositive(Ndes))ǫLambda;max贡献(14)
lambda;moment= xnor(starboardTack,isPositive(Ndes))ǫlambda;max贡献(15)
其中Lambda;max贡献ge;0,lambda;max贡献ge;0且Nsailthresholdge;0是调整参数。这些可用于通过用户界面进行实时调整。 omega;relisin;[0°,360°]是相对风向。
这个时刻图可以被更容易地用文字描述。方向舵与所需时刻成比例地移动。在特定阈值Nsailthreshold之后,相应的帆通过比例为主帆的Lambda;max贡献或热那亚航行的lambda;max贡献而与所需时刻成比例地偏离风。图8显示了示例场景。
该方案在航行点上具有良好的效果,包括近距离拖曳和波束范围。然而,当顺风运行时,风帆没有任何力矩贡献,因为这些都是完全延伸的。在测试船期间,Lambda;max贡献和lambda;max贡献通常都设置为45°,Nsailthreshold设置为0,但不同的配置被测试了。由于船的主帆与热那亚航行的面积大致相同,因此Lambda;max贡献等于lambda;max贡献是有意义的。另一种方法是平均收紧和缩短两个帆。然而,不希望使帆角更小,因为这可能引起该帆周围的湍流,这反过来又降低了帆的效率。
由于方向舵与所需扭矩成比例并且方向舵动力学非常快,因此当期望扭矩变化时几乎立即产生扭矩。由于低功率执行器,风帆的响应速度要慢几个档次。由于航行角度限制为ε[0°,90°],在顺风行驶时风帆将保持在90°,这是可取的。
4.2操作方式
已经定义了四种控制操作模式:
bull;半手动
bull;标题保持
bull;航点跟踪
bull;路径跟随
这些模式如下所述:
半手动在此模式下,用户通过图形用户界面操作Ndes。因此,用户可以在不考虑风帆的情况下操作船。因此,只要用户将船引导到可行的方向,就可以像操作无线电控制的汽车一样轻松地完成航行,其中Ndes对应于转弯并且alpha;对应于节流。
这种操作模式已被证明非常有用,不仅测试控制分配算法,而且测试系统的不同方面。它也是在测试更高级算法之前手动定位船的有效工具。
标题保持:标题保持模式使用基本比例控制器来维持某个标题,psi;ref:
e =psi;ref - psi;(16)
Ndes = Kpe,(17)
其中psi;isin;[0°,360°]是测量的航向,见4.1节,Ndes是所需的扭矩,在较低的水平饱和到[-1,1]。 Kpgt; 0是比例调整参数。 Kp和psi;refisin;[0°,360°]是可以从用户界面实时更改的变量。
航点跟踪:航点跟踪模式是关闭位置环的最简单的自动模式。上面的引导系统,见第5节,将航路点(所需位置)向下传递给该控制器。控制器确保朝向相应航路点的进度。
通过将朝向航点的方向作为psi;ref传递到与航向保持模式相同的航向控制器,可以简单地确保航点的进展。这是一种非常简单的方法,不考虑侧滑。航向参考psi;ref按以下方式计算:
PnDelta;= PnRef.Waypoint - Pnboat(18)
psi;ref= 90° - atan2(PnDelta;),(19)
其中PNRef.Waypoint和PNboat是NED位置航点和船,分别。 atan2(a)isin;[-pi;,pi;]返回矢量参数和东轴之间的角度,相当于atan2(a1,a2)。资料编号:[5283]



