重型无人驾驶集装箱转运车同轴式电驱动桥结构设计毕业论文
2021-11-26 23:34:51
论文总字数:21674字
摘 要
本文所设计的同轴式电驱动桥是机电一体式设计,较传统驱动桥有诸多优点。同轴式电驱动桥将电机与半轴的轴线重合,提高了效率,更利于传递转矩,优化了驱动桥的布置方式。本文在分析完重载无人驾驶集装箱转运车的运行工况后,首先通过查阅《机械设计手册》设计重载无人驾驶集装箱转运车同轴式电驱动桥零部件,并通过数值计算校核;然后借助三维绘图软件UG绘制出各零部件并进行装配,最后通过ANSYS分析,分析差速器壳体应力情况进行优化。最后设计出适用于重载无人驾驶集装箱的同轴式电驱动桥结构。
关键词:重载无人驾驶转运车;同轴式电驱动桥;ANSYS;UG。
Abstract
The coaxial electric drive axle designed in this paper is an integrated electromechanical design, which has many advantages compared with the traditional drive axle. The coaxial electric drive axle coincides the axis of the motor with the half axis, which improves the efficiency, facilitates the transfer of torque, and optimizes the arrangement of the drive axle. After analyzing the operating conditions of the heavy-duty unmanned container transfer vehicle, this paper first designs the parts of the coaxial electric drive axle of the heavy-duty self-driving container transfer vehicle by consulting the Mechanical Design Manual and verifies them by numerical calculation, then draws the parts and assembles them with the help of the three-dimensional drawing software UG, and finally analyzes the stress of the differential shell for optimization through ANSYS analysis. Finally, a coaxial electric drive axle structure suitable for heavy-duty unmanned containers is designed.
Key words: Heavy-duty unmanned transfer vehicle; coaxial electric drive axle; ANSYS;UG.
目录
第1章 绪论 6
1.1研究目的 6
1.2国内外电驱动桥的研究现状 6
1.3研究意义(市场,学习意义) 7
第2章 参数设计 9
2.1设计目标 9
2.2设计的主要结构及零部件 9
2.3整车性能参数 9
2.4电机的选择 10
2.4.1电机功率的确定 11
2.4.2电机类型的选择 12
2.5行星齿轮减速器的设计 14
2.5.1行星齿轮减速器总减速比的确定 14
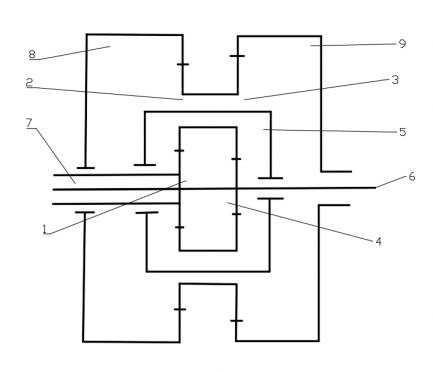
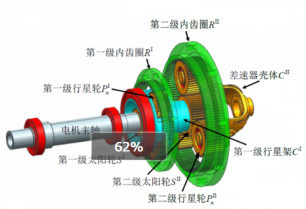
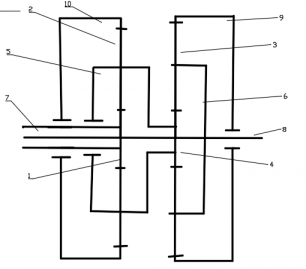
2.5.2行星齿轮减速器结构方案的确定 15
2.6行星减速器齿轮的设计 19
2.6.1齿轮材料的选择 19
2.6.2按接触强度初步确定中心距 19
2.6.3初步确定模数、齿数、螺旋角、齿宽、变位系数等几何参数 20
2.6.4齿面接触强度核算 20
2.6.5轮齿弯曲强度核算 23
2.7轴的设计 26
2.7.1半轴最小直径D的选取 26
2.7.2空心轴直径D的选取 27
2.8键的设计 27
2.8.1空心轴连接键 27
2.8.2半轴连接键 29
2.9差速器锥齿轮的设计 29
2.9.1锥齿轮参数初步设计 30
2.9.2锥齿轮几何尺寸设计 31
2.9.3锥齿轮齿面接触疲劳强度校核 35
2.9.4锥齿轮齿根弯曲疲劳强度校核 37
2.10滚动轴承的选择 39
2.10.1滚动轴承的分类 40
2.10.2滚动轴承的选择 40
第3章 基于ANSYS的壳体应力分析 41
第4章 结论 43
致谢 44
参考文献 45
附录 45
绪论
1.1研究目的
电机动力是本次设计的无人驾驶集装箱转运车采用的唯一驱动动力。电机之所以能更好适应汽车行驶的各种工况,是因为其具有较宽的转速范围、较大的启动力矩及宽广的功率范围。由于无人驾驶集装箱转运车的负载过大,仅依靠电机不足以提供较大扭矩,需要采用与电机匹配的减速器以达到减速增扭的作用。按照传统汽车的布置方式,电机与减速器之间不仅传动效率不高,而且在底盘上的布置便十分占用空间;又因为纯电动汽车蓄电池要占用很大空间,因此在满足动力性要求的前提下,对汽车底盘的空间布置分配便极为重要,可以直接影响到汽车大小尺寸。本次设计的无人驾驶集装箱转运车的电驱动桥所采用的即是电动机-驱动桥一体化中的同轴式电驱动桥。
1.2国内外电驱动桥的研究现状
从驱动能源传递方法这一方面对纯电动汽车进行划分,大致可分为三种:
- 传统驱动模式:将传统驱动系统原有的内燃机替换成电动机,保留离合器、变速器、传动轴和驱动桥等传动结构,大致上采用了传统燃油车的空间布置。
- 轮毂电机分散驱动模式:这种驱动模式主要分为外转子内定子和内转子外定子两种结构,是将轮毂电机直接装在传电动汽车的车轮里的一种结构。
3)电动机-驱动桥一体化驱动模式[1]:这种模式通过将驱动电机输出轴直接与主减速器相连接,去掉离合器变速器及传动轴等结构,此时驱动电机内部的输出轴、主减速器与差速器的主轴平行,形成一个驱动整体。双联式、平行式、同轴式三种结构可以划分这种电动机与驱动桥的组合方式。
同轴式电驱动桥取消了传统汽车的传动系统[2],电机输出的动力经变速齿轮等机构直接驱动车轮,之所以成为纯电动汽车发展的主要方向之一,是因为其具有便于模块化生产、车身内部空间利用率高、传动效率高、可控性好等诸多优势。不久的将来,我国进入新能源汽车的快速发展和节能环保的迫切需求的环节时,这种匹配同轴式电驱动桥的新能源汽车将会快速发展同时拥有巨大的市场前景。同轴式电驱动桥已受到国内外各大汽车厂商的重视,比亚迪和东风德纳车桥已相继推出了同轴式电驱动桥。
国内对于电驱动桥的研究,有一汽解放研发的两档同轴式驱动桥,两挡同轴式电驱动桥节约了变速器和传动轴的布置空间,提高了整车布置空间的利用率,缩短了动力传递路径,提高了传动效率;其结构简单、重量和体积小,便于驱动桥总成及整车布置;同时还解决了其他同轴式布置的电驱桥不能换挡的问题,采用两挡结构,能同时兼顾整车低速时对电机最大扭矩的需求和最高车速时对电机转速的需求,既降低了电机的开发难度和成本,又合理的利用了电机的高效区间,发挥电机的特性优势,为整车的动力性和经济性带来优势。
国外在电驱动桥研究上走得靠前的有奥迪e-tron纯电动SUV采用舍弗勒提供的电驱动桥[3],舍弗勒电驱动桥因级联式行星排和轻量化差速器可以采用模块化设计,这种自由组合实现不同的布置方式,同时适用于同轴式的后桥以及平行式的前桥,无需重新设计,大大减少了开发成本和时间。
1.3研究意义(市场,学习意义)
纯电动汽车的驱动桥直接关系着汽车的动力性,因为蓄电池的原因,纯电动汽车对底盘的空间分布有很多的限制,所以,如何设计一款既满足纯电动汽车动力性要求,又较好适应于汽车底盘布置的电驱动桥便十分重要。
同轴式电驱动桥的电机和减速机构置于两车轮中间,采用集成式设计,同一直线贯穿整个后桥的重心与车轮的行驶中心。有效缩短传动链长度,提高传动效率,增加新能源汽车的续航里程是这种驱动后桥电机减速的集成一体化设计的优点。采用同轴布置动力输入与输出,为了克服了电机悬挂所产生的后桥倾覆力矩的影响,电机减速器重心与车轮行驶中心线同线,位于两车轮中间。为了避免了后桥的共振,驱动桥以重心平衡状态安装于汽车上,行驶时驱动后桥的振动会大大的减小。同时由于路况,行驶过程中所产生的冲击载荷会大大减小,进而其强度、刚度及疲劳寿命也得到了一定的提高。
整个后桥系统采用空心轴电机、平行轴式减速器、差速器的同轴一体化布置方式。为了可以提高后桥的疲劳寿命,避免会对后桥产生额外的倾覆力矩作用[4],后桥的重心与后车轮的中心在一条轴线上。此外,为了同轴式电驱动桥能有效解决现有新能源汽车电动桥传动效率低,续航里程短的问题。后桥采用高效率的减速方式,平行轴式齿轮减速是一种有效的减速方式。
集装箱转运车因为常年处于大载荷的工况,对于汽车的后桥的负载是较大的,如果,后桥因疲劳出现裂纹[5],从而导致结构失效,便会对汽车有极大损伤,可能会造成重要事故。因此,在设计电驱动桥的同时,需要对其进行应力分析,通过有限元分析的方法对其优化设计。
随着人们对排放的控制的,新能源的发展会更具有前景,汽车行业也逐步推出各种新能源汽车,替代传统能源,以启到节能减排的效果,因此纯电动汽车具有非常广阔的前景。
通过学习相关知识完成纯电动汽车电驱动桥的结构设计,在一定程度弥补了自己在新能源汽车认知上的不足,通过对比分析,更可以加深自己的对各型汽车构造的认识。
参数设计
2.1设计目标
- 集装箱转运车在最大承重60吨的工况下,满足的最大速度为30km/h的动力性要求,在满足动力性要求的前提下,对电驱动桥的结构进行设计并优化。
- 转运车在最大承载下,各零部件的刚度、疲劳寿命满足正常使用要求。
- 有一定的爬坡能力。
2.2设计的主要结构及零部件
盘式电机——动力源,为转运车提供动力。
行星齿轮减速器——减速增矩,传递动力;其中包含两级减速齿轮的设计。
差速器——调节两半轴的转速,传递动力;其中包含锥齿轮的设计。
空心轴和半轴——传递动力;其中包含键的设计。
滚动轴承——定位。
2.3整车性能参数
根据任务指导书上所给定的整车性能参数,以及设计的要求整合得到下表:
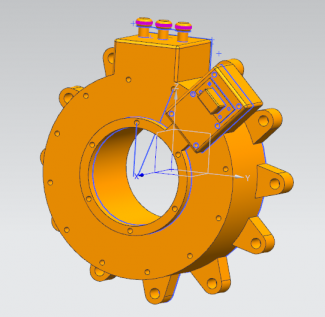
图2.1 转运车
表2.1 整车参数表
参数 | 数值 |
最大载荷质量M1 | 60000kg |
整备质量M2 | 20000kg |
总质量M | 80000kg |
迎风面积A | 24.75m2 |
空气阻力系数CD | 0.7 |
车轮直径d | 1.615m |
滚动摩擦阻力系数f | 0.02 |
满载最大爬坡度 | 大于或等于5% |
满载爬坡速度Vα’ | 10km/h |
满载最大速度Vmax | 30km/h |
传动系统效率μ | 0.85 |
旋转质量换算系数 | 1.05 |


2.4电机的选择
以车载电源为动力,用电机驱动车轮行驶,符合道路交通、安全法规各项要求的车辆是指电动汽车。纯电动汽车的唯一驱动源是电机动力,为电动汽车的驱动电动机提供电能,电动汽车电机将电源的电能转化为机械能,通过传动装置或直接驱动车轮和工作装置。选择电机时,电机应具有运行平稳,功率充沛,尺寸合理等优点,因为电机的选择好坏直接影响到汽车的动力性[6]。
2.4.1电机功率的确定
为了使电机功率满足车辆的使用性能要求,电机的峰值功率需要满足车辆在满载高速行驶、满载爬坡行驶和满载启动加速行驶时的最大功率要求,即满足以下公式:
 (2.1)
(2.1)
请支付后下载全文,论文总字数:21674字
相关图片展示: