基于3D定位的车辆姿态测量方法研究毕业论文
2020-02-19 19:37:27
摘 要
汽车姿态测量是实现智能交通的关键信息之一。对于高精度的汽车姿态的测量,传统方法是采用以惯性传感器为核心的惯性导航系统,但惯性传感器的结构复杂,而且其误差随着时间增长而不断积累。全球导航卫星系统(Global Navigation Satellite System,GNSS)由于其长期定位精度高的特点成为研究的热点
本文围绕以下几点展开了研究探讨:
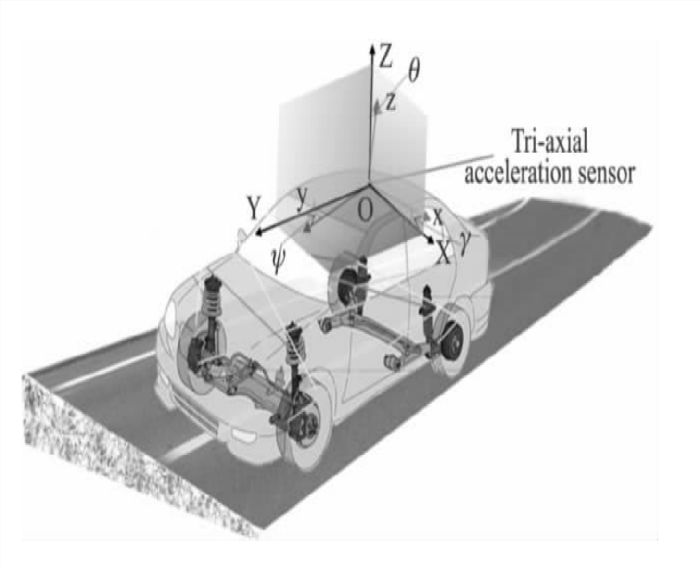
1.汽车姿态测量及算法的理论基础介绍。在汽车姿态测量系统的设计中设计汽车本身的车体坐标到导航坐标系的转换,涉及到坐标系的变换和姿态角等概念。
2.对GNSS定位定向原理进行了详细介绍。包括GNSS系统构成以及观测量的方法,GNSS相对定位原理和双天线定向的原理。
3.对于本文所采用的汽车姿态测量系统算法进行介绍,其中包括基于单差模型的模糊度固定法以及周跳探测与修复,基于以上理论提出了一种汽车姿态测量系统设计。
关键词:GNSS;姿态测量;卡尔曼滤波
Abstract
Automobile attitude Measurement is one of the key information to realize intelligent transportation. For the measurement of high precision automobile attitude, the traditional method is to use inertial navigation system with inertial sensor as the core, but the structure of inertial sensor is complex, and its error accumulates with time.
Global Navigation Satellite System (Navigation Satellite System,gnss) has become a research hotspot due to its high long-term positioning accuracy
This article revolves around the following points to carry on the research discussion: 1. Introduction to the theoretical basis of automobile attitude measurement and algorithm.
In the design of automobile attitude measurement system, the vehicle body coordinates of the automobile itself are designed to transform the navigation coordinate system, which involves the concepts of coordinate system transformation and attitude angle. 2. The principle of GNSS positioning orientation is introduced in detail.
Including the composition of GNSS system and the method of observation, the principle of relative positioning of GNSS and the principle of dual antenna orientation.
3. The algorithm of automobile attitude measurement system used in this paper is introduced, including fuzzy degree fixing method based on single difference model and weekly jump detection and repair, and a vehicle attitude measurement system design based on the above theory is proposed.
Keywords: GNNS; attitude measurement; Kalman Filter
目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1. 课题研究背景及意义 1
1.2. 姿态测量技术国内外研究现状 2
1.2.1. GPS国内外发展现状 2
1.2.2. MEMS传感器研究现状 3
第2章 汽车姿态测量理论基础 5
2.1. 坐标系与姿态角 5
2.1.1. 空间直角坐标系 5
2.1.2. 大地坐标系 5
2.1.3. 大地基准 6
2.1.4. GNSS坐标转换 6
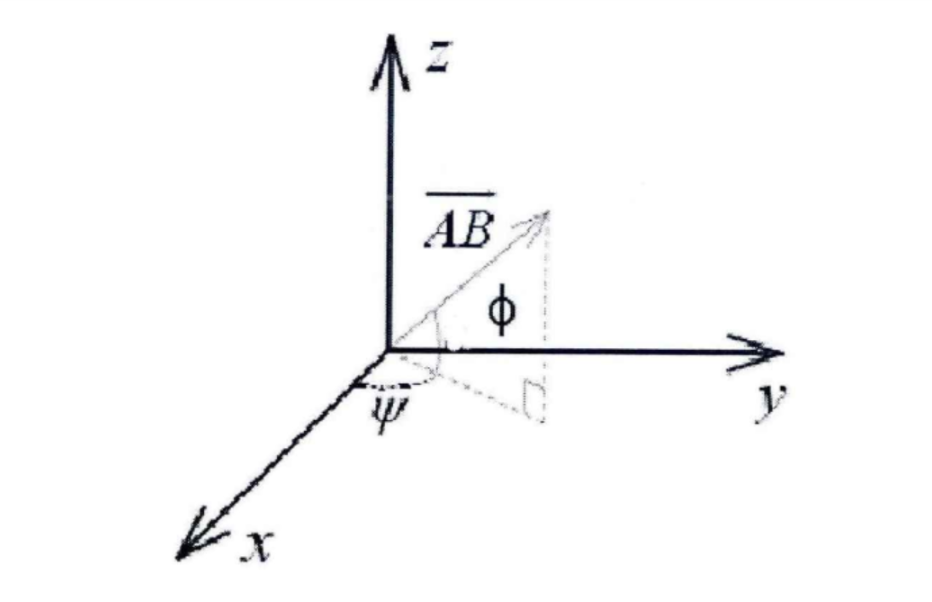
2.1.5. 姿态角的定义 7
2.2. MEMS传感器原理介绍 7
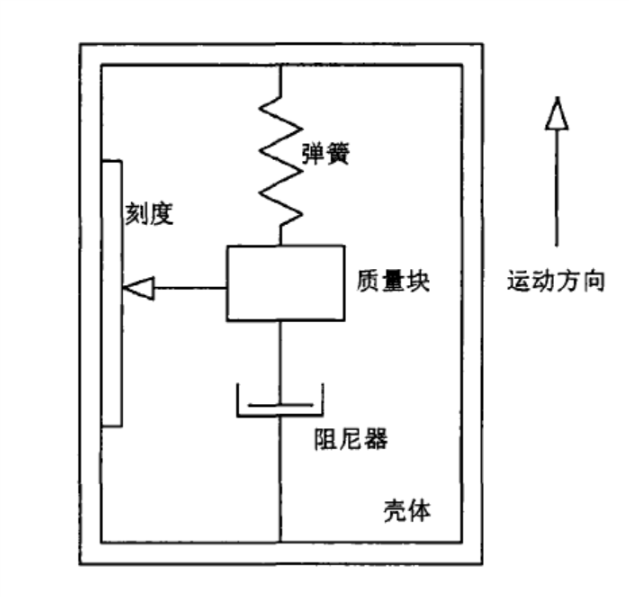
2.2.1. MEMS加速度计原理 7
2.2.2. MEMS陀螺仪 8
2.2.3. 磁强计 9
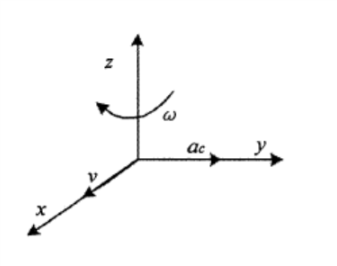
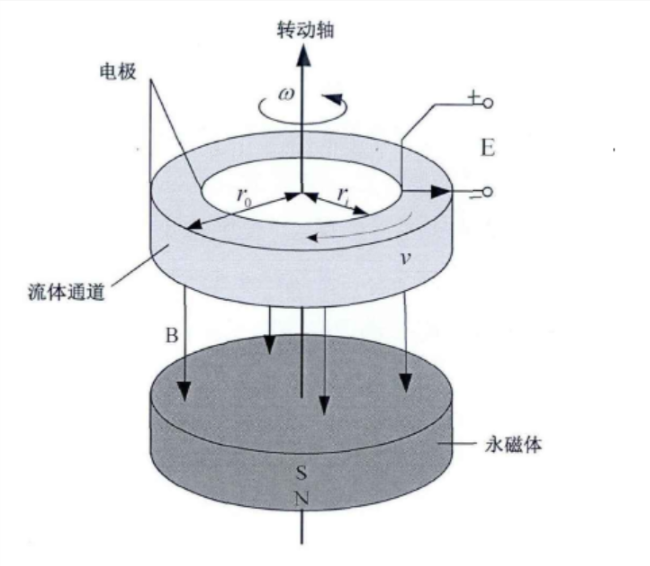
2.3. MHD角速度传感器的基本工作原理 10
2.4. 本章小结 11
第3章 GNSS定位定向原理 10
3.1. GLASS系统的组成 10
3.1.1. 空间部分 10
3.1.2. 地面监控部分 10
3.1.3. 用户部分 11
3.2. GNSS观测量 11
3.2.1. 伪距观测量 11
3.2.2. 载波相位观测量 12
3.2.3. 线形组合观测量 13
3.3. GNSS相对定位原理 13
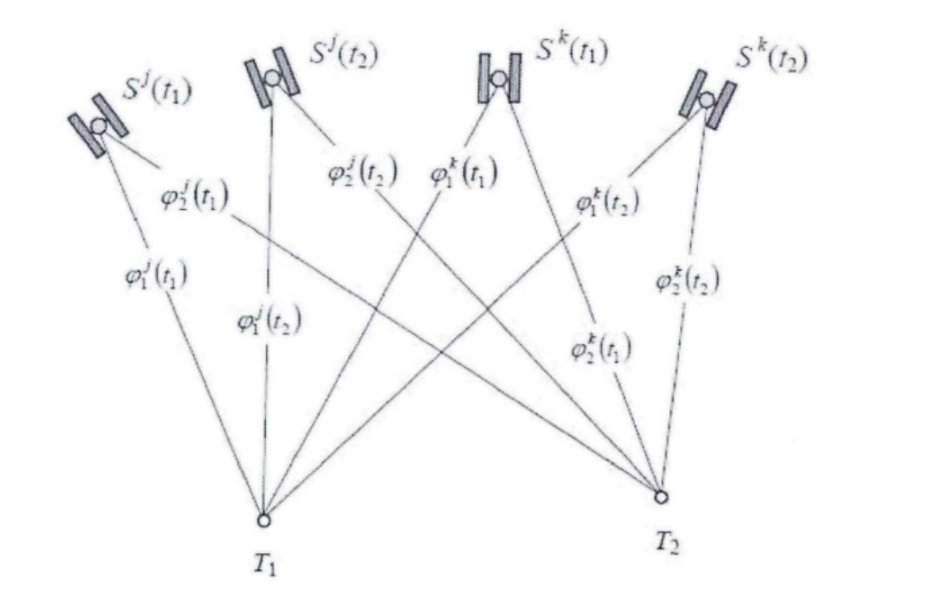
3.4. 双天线定向原理 15
3.5. 本章小结 16
第4章 汽车姿态测量系统算法研究 16
4.1. 卡尔曼滤波的理论方法 16
4.1.1. 离散系统的卡尔曼滤波 16
4.1.2. 连续系统的卡尔曼滤波 17
4.2. 周跳探测与修复 18
4.2.1. 多项式拟合法 18
4.2.2. 伪距/载波组合法 19
4.2.3. 电离层残差法 19
4.2.4. 基于卡尔曼滤波算法的周跳探测及修复方法 20
4.3. 解算整周模糊度 22
4.3.1. 整数最小二乘 22
4.3.2. 基于单差模型的模糊度固定法 23
4.4. 本章小结 25
第5章 汽车姿态测量系统的设计与误差分析 26
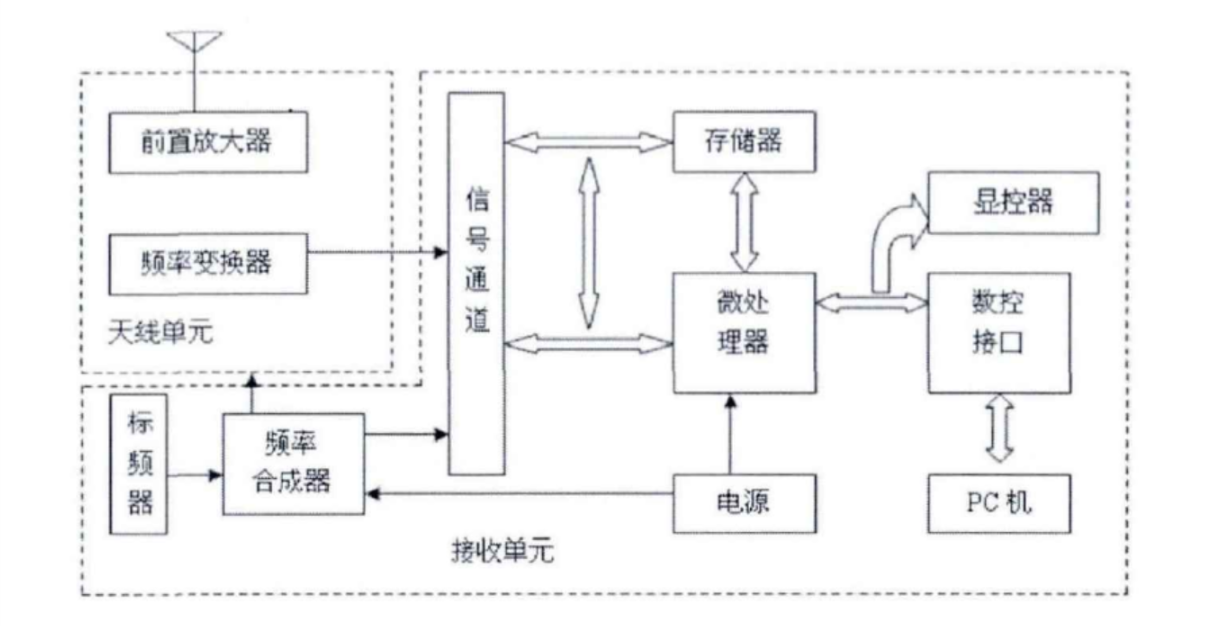
5.1. 姿态测量系统硬件框架设计 26
5.1.1. 接收机选型及配置 26
5.1.2. GPS卫星观测数据的传输 27
5.2. 姿态测量系统的算法流程设计 28
5.2.1. 总技术流程 28
5.2.2. 基线解算流程 28
5.3. GPS定位误差源及其影响分析 29
5.3.1. 与卫星相关的误差 29
5.3.2. 信号传播过程中的误差 31
5.3.3. 与接收机相关的误差 33
第6章 总结与展望 34
6.1. 工作总结 34
6.2. 展望 34
致 谢 35
绪论
课题研究背景及意义
自改革开放以来,汽车逐渐进入寻常百姓的家庭。随着科技的迅速发展,在汽车产业出现了许多新的发展趋势。一是智能交通和车联网技术,它们为解决未来交通问题提供的新的解决方案。车联网可以把汽车位置、姿态、航向、速度和行驶路线等信息汇总到云服务器上,实现汽车与汽车,汽车与基础设施等的实时通讯,并通过计算机技术把汇总的信息进行处理,规划不同汽车的行驶路线,时间交通智能化。二是无人驾驶技术。无人驾驶是让汽车自己拥有环境感知、路径规划并自主实现汽车控制的技术,也可以说是用电子技术控制汽车进行的仿人驾驶或是自动驾驶。就在2015年10月,特斯拉推出了半自动驾驶系统Autopilot,是第一个投入商用的自动驾驶技术,Autopilot半自动驾驶系统可以实现自动变换车道、自动辅助导航驾驶、以及自动辅助转向等功能。在2018年发布的奥迪A8轿车,第一次在量产车上实现了L3级别的自动驾驶,大大减轻了驾驶员在拥堵路况的驾驶负担。
不论是智能交通还是无人驾驶的实现,都离不开汽车姿态测量、导航以及定位技术的发展。对于汽车姿态测量,目前世界上有三种主流的测量方法。
全球导航卫星系统(Global Navigation Satellite System,GNSS),是囊括了区域的、全球的所有的卫星导航系统,例如俄罗斯的GLONASS系统[1]、美国的GPS系统、中国的北斗卫星导航系统等。上个世纪美国等国的GNSS技术的逐渐与实际应用接轨,汽车定位与导航技术便依托于美国GPS技术的突飞猛进而迅速发展起来。GNSS核心原理是空间的交汇,通过接收在轨卫星发射的无线电信号进行非主动试测距,从而可以提供非常精确的速度信息和位置信息。GNSS系统的优点是:长期定位精准度高,导航的误差没有时间积累效应,重量较轻,体积较小,成本较低,己经被广泛应用在军事、测绘等各个科学研究领域,例如:交通运输、跟踪监控、移动导航、航空航天、大地测量、气象学等。GNSS实现姿态测量也有许多缺点,例如:在进行信息交换时要求天线对空可见,因此信号极易受到干扰和阻挡,此时GNSS系统无法为用户提供连续可靠的姿态测量信息。除此之外,GNSS还有数据输出频率低、短期噪声大等缺点。
惯性导航系统[2](Inertial Navigation System,INS)能够同时输出多种导航信息,例如:位置、速度、姿态等。核心元件为用陀螺仪、加速度计等惯性元件和磁强计组成,用来测量载体的角速度和加速度,用积分的方式来获得取速度信息以及位置信息。惯性导航的核心部件是惯性传感器,它可以用来测量的运动信息,例如:汽车俯仰角、偏航角、倾斜角等。其测量不需要与外界通讯,因此具有自主性、封闭性、稳定性等特点。该系统分为两大类,平台式和捷联式。台式为传统机电平台的姿态测量系统,而捷联式惯性导航系统采用数字平台对导航信息进行解算。
微机电系统[3](Micro Electro Mechanical System,MEMS)是近些年的研究热点之一,这项技术使得微体积、低成本的惯性姿态测量系统得到了日新月异的发展。基于MEMS技术传感器有很多,例如基于MARG传感器[4]的姿态测量系统。其主要由三部分组成:三轴陀螺仪,加速度计和磁强计。该姿态测量系统与传统的初始对准不同,其加速度计和磁强计可以实现粗对准,再与陀螺仪相结合进行精对准。汽车姿态测量系统的解算主要有两种途径,一是基于加速度计和磁强计信号直接进行解算,二是根据陀螺仪测量的角速度进行积分解算。第一种算法不会产生时间积累误差,但加速度计容易受到线性加速度干扰,磁强计容易遭到软硬磁干扰,数据解算误差增大。MEMS陀螺仪随机误差较大,所以第二种算法的误差会随着时间的增加而增大,导致精度较低。
姿态测量技术国内外研究现状
GPS国内外发展现状
GPS在创建初期使用用途很狭窄,仅仅只是提供授时和定位两个服务。随着技术的进步和研究发展,有学者提出,可以利用GPS进行姿态的实时测量,汽车姿态测量与无人驾驶密切相关,更是引起了许多学者的兴趣。1986年美国的Evans[5]率先使用GPS进行了姿态解算,在此之前,基于GPS的姿态测量技术还仅仅能在仿真软件中实现。随着GPS在军事、交通运输等领域的应用对于,GPS多天线姿态测量技术的研究更加深入。在1978年,美国加利福尼亚大学和美国麻省理工学院提出了通过解算姿态基线向量以及利用载波相位差的的方法进行求解姿态信息。再此之后,载波相位测量技术成为研究者进行验证的常用方法。在1991年,Ash-technology公司研制出了一种新的姿态测量系统,其原理是基于GPS干涉仪进行三维测量,促进了GPS姿态测量技术的进一步发展。1999年,基于单天线的GPS姿态测量技术被提出并且进行应用,GPS姿态测量技术研究引来了更多人的目光。Kornfeld[6]等人对GPS单天线测量进行了更加深入的研究,以行驶系统的速度轴的姿态角为基础进行测量与解算,可以高效的进行系统故障诊断。在2000年,Junhan在数据传输同步问题上有所突破,实现了同步地GPS高精度姿态测量,在此之后,GPS技术再次之后又开始加速发展。在2008年以后,来自JAVD公司和Trimble公司的多天线接收机市场份额初步增大。然而相较于欧美国家,由于起步晚,国内对于GPS姿态测量技术的研究较为落后,很多只停留在理论仿真研究阶段。近些年来,随着实际工程运用的增多,GPS姿态测量技术的研究越来越深入,越来越广泛。北京控制工程研究所通过外接Trimble公司的接收机设计出的姿态测量系统给,在实际姿态测量实验中得到了较高的测量精度。上海交通大学利用NovAtel公司的OEM板卡的时钟源,进行了基于共时钟一机多天线的姿态测量实验,姿态角测量精度可达。
MEMS传感器研究现状
微惯性技术随着微电子技术的进步而迅猛发展。MEMS是利用微精细加工技术在半导体基板上制造微型机械,并将微型传感器、执行器、控制电路、电源以及接口信号处理等集成在一起。MEMS器件有点颇多,例如:体积较小、谐振频率高、回应时间短等特点,在精密器械、定位追踪、通信工程等多个领域广泛使用。
在1960年,第一个MEMS压力传感器在贝尔实验室诞生。在此之后的几十年间,MEMS传感器得到了突飞猛进的发展。经过多年研究发展,现在的MEMS传感器有繁杂种类。除了常见的微机械陀螺,还有压力传感器、加速度计、流量传感器、磁传感器等不同用途的传感器。
美国国防部Draper实验室[7]从是最早开始MEMS传感器研究的机构之一,早在上个世纪末便开始电路的集成设计。此外,美国喷气推进实验室(JPL)、Litton、Honeywell、Analog Device等研究机构和公司也积极投入惯性传感器技术的研究。如Analog Device公司在2000年左右生产的ADXL150和ADXL250加速度计[8],噪声水平可以达到,零偏稳定性约为。目前精度最高的MEMS加速度计为Draper实验室研发的谐振式加速度计,精度达到。在陀螺仪精度方面,上世纪九十年代初时MEMS陀螺仪精度只有,而随着技术的突飞猛进,目前民用级的陀螺仪精度也可达,挪威Sensor公司正在研制的最新型陀螺仪的设计精度竟达到。
国内的MEMS研究也逐渐兴起,虽然起步晚,但是在设计、生产等方面逐步向世界一流水平靠近。清华大学精密仪器系的陶永康、刘云峰等设计实现了一种扭摆式微机械加速度计,达到过载能力10万g。贾芳秀、袭安萍[9]等人研究基于DDSOG(Deep Dry Silicion On Glass)工艺的硅微振动陀螺仪的结构和封装,建立陀螺仪输出和温度之间的关系模型进行补偿,提升了产品整体性能。葛海浪、佘勃等针对MEMS电子罗盘容易受到干扰和成本高的问题,对电子罗盘的误差模型进行分析并校正,实现高精度姿态角的测量。
对于MEMS来说,除了设计、包装工艺和改进外,输出、建立传感器模型并校准也是一个提高产品性能的方法。ZF Syed,P Aggarwal[10]等人提出了一种惯性导航MEMS传感器的多面体标定算法,该方法可以有效得修正传感器模型的误差参数。Heinssen Shellwege N等使用数字校准的方法校准MEMS传感器,并检验校准的状态,以满足惯性姿态测量的需要。赵阳、朱安平等人研究了零偏稳定性[11]优化技术,在其他学者研究的基础之上,深入分析找出影响陀螺仪零偏转稳定性的原因,提出了提高陀螺仪输出特性的方法,该方法可以使陀螺仪从抑制的零偏温度和减少输出噪声。龙达、刘琼等提出了一种基于椭球拟合的三轴陀螺仪快速标定方法,该方法可以在非精密仪器下进行"测试标定"[12]。孙伟等人提出了MEMS传感器在导航系统自摆姿态和定位精度方面的自补偿方法[13],该方法可以显著提高姿态测量的精度
汽车姿态测量理论基础
坐标系与姿态角
我们在研究移动物体的时候,要来了解有关物体的速度和形态等信息。对空间对象的位置进行描述时,要先建立坐标系。为了对球形表面的局部形状进行研究,并使得校正数最小,每个国家和地区选择符合局部大地水准面的椭球体来建立坐标系。这样就转变为参考椭球和参心坐标系[14]。很明显,坐标系中心与地球的重心通常是不一致的,因此也被称作非地心坐标或相对坐标系等,但差异较小。在实际应用过程中,我们广泛使用以下两种类型的参心坐标系。
空间直角坐标系
在这种坐标系中,原点在参考椭球的中心处,轴指向赤道和起始子午面的交点,轴在赤道平面上并垂直于轴,轴指向北极方向,点坐标可以通过每个坐标轴上的该点的投影表示。如图所示:
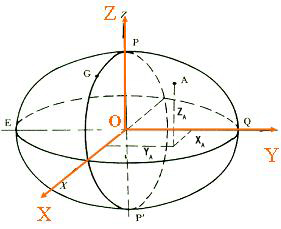
图2.1 空间直角坐标系
大地坐标系
在该种坐标系中,使用大地经纬度和高程来对空间的位置进行描述。经度是空间点与椭球表面和起始子午线间的角度;纬度是指空间点与椭球面的赤道面和法线的角度;大地高程则是空间点沿法线方向到椭球的距离。
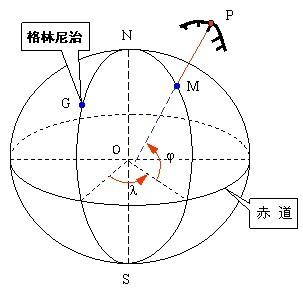
图2.2 大地坐标系
大地基准
大地基准是用于建立大地坐标系基本数据,能对控制网中各点的大地坐标进行推算,包括一组起始计算数据和大地测量参数。
大地测量参数包括地心引力,赤道半径,地球自转的角速度。起算数据包括大地经纬度、大地高程以及大地方向角。
GNSS坐标转换
在测量过程中,坐标系变换也就是变换发生在不同的坐标形式间,基准变换是指变换发生在不同的参考标准之间。
大地坐标系在同一参考标准下转换为空间直角坐标系。公式为:
(2.) |
各参数的含义:
为卯酉圈的半径
为椭球的偏心率
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: