水下机器人航迹跟踪控制策略研究毕业论文
2020-02-19 09:03:58
摘 要
近年来,随着经济与科技的发展越发迅猛,人类对资源的需求也与日俱增。在对各种传统资源采集的同时,人类也面临着人口增加、能源短缺与环境污染等诸多问题。海洋占据了地球总面积的十分之七,蕴藏着及其丰富的生物、矿产及各类其他资源。过去丰富的海洋资源受制于科技等现实条件的不足,并未深入地开发利用。近几年随着海洋工程的发展水下航行器作为海洋勘探的新型而实用的设备己得到了世界多个国家的广泛关注。
为完成相应的水下作业任务,需设计相匹配的控制器保证无人水下航行器对期望航迹的精确跟踪控制,进而满足海洋开发应用中对无人水下航行器运动控制技术的需求,目前己成为水下机器人学的国际研究热点之一。
本文为研究水下机器人的航迹跟踪控制策略进行了研究,主要工作如下:
一,总结了水下机器人的航迹跟踪控制策略的研究背景及研究意义。并浅述了水下机器人的航迹跟踪控制和一些控制策略的研究现状及其特点。
二,推导了水下机器人的空间运动学方程,分析了水下机器人的动力学特性。建立了水下机器人的运动学模型和动力学模型,并适度的对水下机器人的六自由度研究模型进行了简化。
三、研究了PID控制及其方法,设计了基于串级PID控制的水下机器人控制算法,搭建了仿真实验模型,并做了仿真实验验证。实验结果证明该控制系统可较好的完成水下机器人对于期望航迹的跟踪控制任务。
四、针对前述模型,在期望航迹追踪过程中,添加了不同种类的扰动进行仿真实验分析。证明了在有扰动情况下该控制系统也可良好完成跟踪控制任务。该系统抗扰动能力良好,适用性良好。
本文研究结果对于水下机器人航迹跟踪策略的深入研究提供了基础。其结果与设计思路具有普适性,可借鉴与其他需跟踪控制策略的领域。对于水下机器人控制策略的研究和发展也有积极意义。
关键词:水下机器人;PID控制;航迹跟踪控制;MATLAB Simulink
Abstract
In recent years, with the development of economy and technology, the demand for resources has increased. While collecting various traditional resources, human beings also face many problems such as population increase, energy shortage and environmental pollution. The ocean occupies seven-tenths of the total area of the earth and contains abundant biological, mineral and other resources. In the past, the abundant marine resources were limited by the actual conditions such as science and technology, and they were not developed and utilized in depth. In recent years, with the development of marine engineering, many advanced equipments have been invested in marine exploration and development, and underwater vehicles as a new and practical equipment for marine exploration have received extensive attention in many countries around the world.
In order to complete the corresponding underwater operation tasks, it is necessary to design a matching controller to ensure the precise tracking control of the unmanned underwater vehicle to the desired track, thereby meeting the demand for unmanned underwater vehicle motion control technology in marine development applications. At present, it has become one of the international research hotspots of underwater robotics.
This paper studies the tracking control strategy of underwater robots. The main work is as follows:
Firstly, the research background and research significance of the underwater track tracking control strategy are summarized. The current status and characteristics of the tracking control of underwater robots and some control strategies are described.
Secondly, the space kinematics equation of underwater robot is derived and the dynamic characteristics of underwater robot are analyzed. The kinematics model and dynamics model of the underwater robot are established, and the six-degree-of-freedom research model of the underwater robot is simplified.
Thirdly, the PID control and its method are studied. The underwater robot control algorithm based on cascade PID control is designed. The simulation experiment model is built and verified by simulation experiments. The experimental results show that the control system can better accomplish the tracking control task of the underwater robot for the desired track.
For the aforementioned model, different types of disturbances were added for simulation experiment analysis during the desired track tracking process. It is proved that the control system can also perform the tracking control task well in the presence of disturbance. The system has good anti-disturbance capability and good applicability.
The results of this paper provide a basis for the in-depth study of underwater robot tracking strategy. The results and design ideas are universal and can be used in other areas where tracking control strategies are needed. It also has positive significance for the research and development of underwater robot control strategies.
Key Words:Unmanned Underwater Vehicle(UUV);PID control;Trajectory tracking control;MATLAB Simulink
目录
1绪论 7
1.1课题研究背景及意义 7
1.2水下机器运动控制概述 8
1.2.1航迹跟踪控制 8
1.2.2控制策略的研究综述 8
1.3本文主要研究内容 9
2. 水下机器人运动建模与动力学分析 11
2.1 水下机器人的空间运动建模 11
2.1.1 坐标系及参数定义 11
2.1.2 水下机器人的运动学方程 13
2.2水下机器人动力学特性分析 16
2.2.1 水动力分析 16
2.2.2 机构执行的驱动力与静力分析 19
2.2.3 水下机器人的动力学模型 20
2.3水下机器人在空间中运动的扰动量分析 20
3. 基于串级PID调节控制的航迹跟踪控制 22
3.1 串级PID控制器设计 22
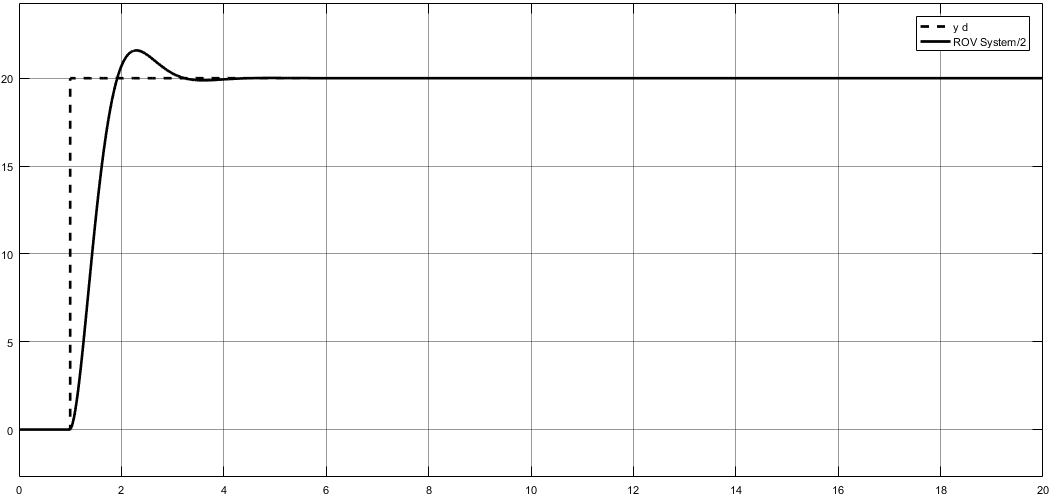
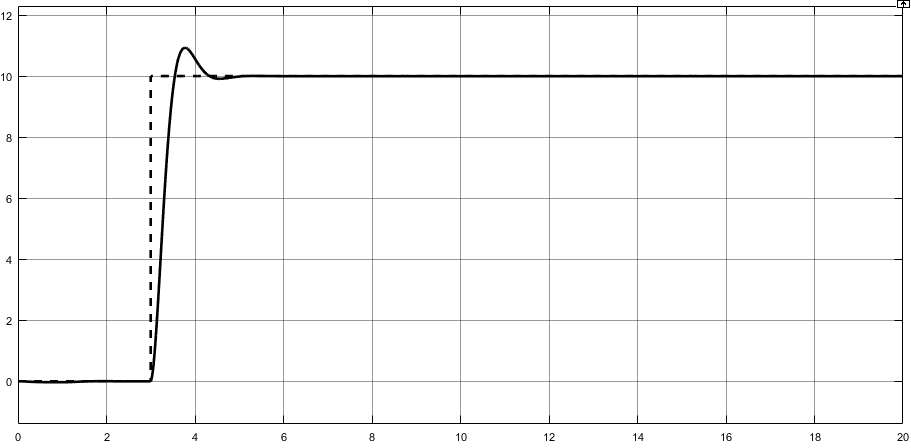
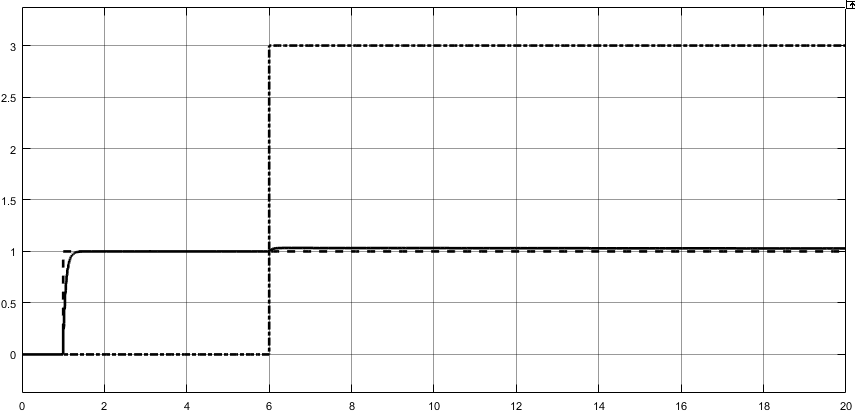
3.2水下机器人航迹跟踪仿真实验与分析 22
4.有扰动情况下的航迹跟踪仿真实验 27
4.1 引言 27
4.2 阶跃信号扰动 27
4.3 正弦信号扰动 28
5 总结与展望 31
5.1总结 31
5.2 展望 31
参考文献 33
致谢 37
1绪论
1.1课题研究背景及意义
近年来,随着经济与科技的发展越发迅猛,人类对资源的需求也与日俱增。在对各种传统资源采集的同时,人类也面临着人口增加、能源短缺与环境污染等诸多问题。海洋占据了地球总面积的十分之七,蕴藏着及其丰富的生物、矿产及各类其他资。过去丰富的海洋资源受制于科技等现实条件的不足,并未深入地开发利用。近几年随着海洋工程的发展水下航行器作为海洋勘探的新型而实用的设备己得到了世界多个国家的广泛关。
如日本东京大学研制的“PETROA250”己成功完成6000米深海试,续航可达2小时;俄罗斯Indel-Partner公司研制的“Super GNOM 2”可下潜250米;挪威Kongsberg公司的“HUGIN”可完成水下1000-6000米水下作业和长达100小时的电池续航时间;美国Woods Hole海洋研究所的“REMUS”可完成最深6000米处的水下作业,且多次协助反水雷、飞机失事救援及航道调查等任务。
我国较世界其他发达国家在无人水下航行器领域的研究起步较晚,不过目前也取得了显着成效。自20世纪90年代以来,哈尔滨工程大学,上海交通大学,中国海洋大学和CSIC 702,越来越重视中国海洋工程的研究。705,710,715等研究机构先后开展了无人水下航行器理论与制造的研。沈阳自动化研究所研发的“CR-01”和“CR-02”可下潜至水下6000米的深度,并且在多次的科研任务中取得了优异成绩;上海交通大学水下工程研究所自主研发的“海龙”号可完成3500米深水作业,2018年4月“海龙11000”设计深度己经达到11000米,且已通过2000米海试,会与“大洋一号”远洋科考船一并执行科考任务;西北工业大学研制的50公斤级水下无人航行器已通过100米海试实。
水下航行器按照是否载人操作分为载人水下航行器(Manned Underwater Vehicle)与无人水下航行器(Unmanned Underwater Vehicle, UUV)两种类。载人水下航行器可以通过人为参与直接控制,因此具有高灵活性,高可操作性和易于处理意外问题。另一种是无人水下航行器,根据电缆的存在与否可分为两类。水下航行器通常被称为远程操作车辆(ROV)并且由水面飞行器或岸基站的操作员控制。将ROV连接到操作员的电缆可以传输诸如电力,视频,导航等信号。潜艇飞机通常被称为自主水下航行器(AUV),其通常使用电池作为能源。水下音频通信技术实现了与操作员的信息交互,并且可以在ROV不能移动的区域中执行某些特殊任务。不过其信号传输难、活动范围狭小等问题限制了其使用。
有缆水下航行器具备的多重优势,使得其在海洋领域的应用倍受关注。既可用于海洋资源的勘探开发,也可用于深海搜救打捞。对于海底测绘,海洋生物研究等诸多领域都有应用。由于不存在船员人身安全问题,水下机器人常在某些特殊领域执行任务。在上述水下作业任务中,无人水下航行器需沿预设航迹精确航行,这就需要无人水下航行器具备精确的跟踪控制能力,进而保证作业任务的顺利完成。为此,根据不同的作业任务需求,通过设计相应的控制器保证无人水下航行器对期望航迹的精确跟踪控制,进而满足海洋开发应用中对无人水下航行器运动控制技术的需求,目前己成为水下机器人学的国际研究热点之一。
1.2水下机器运动控制概述
1.2.1航迹跟踪控制
航迹跟踪控制是在ROV研究领域内的关键技术与热点问题。在ROV完成水下作业任务时,航迹跟踪控制的性能与质量直接对ROV运行的经济性和稳定性产生影响。依据跟踪状态偏差与时间的关系不同,航迹跟踪控制可分为轨迹跟踪控制(Trajectory Tracking Control)和路径跟踪控制(Path Following Control)两种。其中轨迹跟踪控制的参考轨迹依赖于时间,路径跟踪控制的目标路径与实践无。目前国内学者的研究多为二维跟踪控和三维直跟踪控制两种。但二维直线跟踪控制难以满足实际的工程需要,如海底地形探测等任务,要求ROV 在水下跟踪一条空间曲线。因此关于ROV的三维航迹跟踪控制研究具有重要的实际意义与应用价值。
1.2.2控制策略的研究综述
ROV在水下空间的运动模型是非线性的,强耦合的,具有可变参数的五自由度不确定性。而且,在实际应用过程中存在不确定的流体扰动,给控制系统的设计带来很大困难。自20世纪70年代以来,水下机器人的水下航迹跟踪控制问题受到越来越多的关注。随着现代控制理论的发展,越来越先进的控制理论逐渐应用于轨道跟踪控制领域。目前在无人水下航行器航迹跟踪控制策略中主要采用的控制方法有:PID控、反步控、神经网络控
(1)PID控制
传统的PID控制是最广泛使用和最实用的控制算法。经过多年的深入研究和优化,相对成熟。PID控制算法在工业生产中的应用率高达85%-90%。PID控制算法具有原理简单,使用方便,鲁棒性强,对模型依赖性低等优点,占据了控制领域的一。然而,考虑到水下机器人模型的特点和水下环境干扰,传统的PID控制策略有其自身的缺点。
诸多专家学者对PID控制算法的改进优化做了大量的深入研究。边宇枢等提出内、外控制回路并行控制的方法,采纳基于PID控制的外部控制回路,并和UUV动力学特性在内部控制回路中进行非线性补偿,用来提升UUV航迹跟踪的抗扰动性能与暂态响应的速。等将传统的PID控制策略与模糊控制策略相结合,通过制定适当的模糊规则,根据UUV实际运动情况对PID控制参数进行在线调整,最终提出模糊自适应PID控制策略用以实现UUV航迹跟踪控。
(2)反步控制
反步控制(Backstepping control)的本质是一种构造性的递推控制策略。Han等采用反步控制和动态逆控制相结合,提出了一种双环控制结构,其内环通过动态逆控制实现无人水下航行器非线性方程的解藕,外环通过反步控制设计控制律,保证闭环控制系统的全局稳定。高剑等通过在闭环反馈控制中加入积分项,用于提高系统对未建模动态的鲁棒性,结合反步设计技术,提出了一种自适应积分反步跟踪控制方法,理论分析证明了该方法可有效地克服参数变化及海流干扰,并通过仿真试验对该方法的有效性进行了验证。
1.3本文主要研究内容
本文以ROV为研究对象,考虑到模型参数不确定性及存在未知扰动等特性,针对ROV的航迹跟踪控制问题,提出了以串级PID 嵌套控制为基础的航迹跟踪控制策略。并利用数值仿真验证了所提供方案的可行性和较传统单级PID控制策略的优越性。以此提供一种快速,高精,抗扰动的控制策略对现有ROV航迹跟踪控制策略进行补充完善。研究内容共分五章,图1.1给出了本文的章节组织结构。
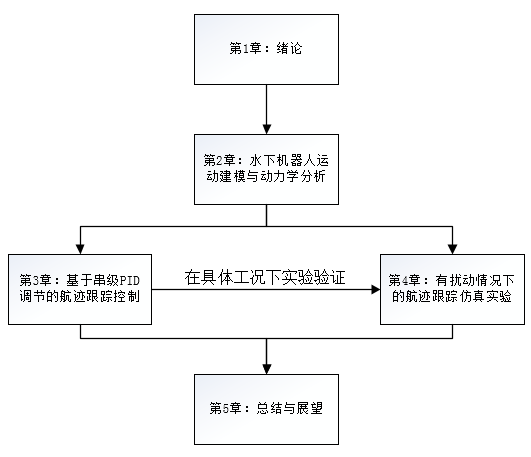
图1.1论文章节组织结构图
第一章:简述了该课题的研究背景及意义,并阐述了国内外水下机器人的研究现状,简述了关于水下机器人航迹跟踪控制的意义和现有部分控制策略的研究综述。并说明了本篇论文的组织构架与主要研究内容。
第二章:介绍了水下机器人的空间运动模型,推导了水下机器人的空间运动学方程,分析了水下机器人的动力学特性。建立了水下机器人的运动学模型和动力学模型。结合了所研究的对象及问题将模型简化。并分析了水下机器人在空间中运动的扰动量。为后续控制策略设计提供了理论基础。
第三章:采用传统PID算法作为主要的控制算法,保证系统的稳定性。采用串级PID控制策略嵌套的。最后结合数值仿真模型进行分析测试。验证了串级PID控制策略的稳定性与优越性。
第四章:针对前述模型,在期望航迹追踪过程中,添加了不同种类的扰动进行仿真实验分析。证明了在有扰动情况下该控制系统也可良好完成跟踪控制任务。控制策略的效果及稳定性良好。
第五章:归纳总结了本文的研究成果,并对无人水下机器人航迹跟踪问题中以串级PID控制为主的控制方法的后续研究工作进行了展望。
2. 水下机器人运动建模与动力学分析
2.1 水下机器人的空间运动建模
水下机器人在在水下进行航行作业时受到多种力与力矩的综合作用,为研究水下机器人作业时的运动特性,需对水下机器人进行控制建模。因为理论研究建模与实际的工作情况有些许不同,为了研究方便抓住问题的主要方面,需进行简化假设便于建模。我们假设:水下机器人为恒质量、体积的刚体,忽略水温、压力、盐度等外部环境因素对体积和浮力的微小影响,水下机器人完全浸没水中且我们认为水为不可压缩流体。基于前述假设可极大的简化所建模型的复杂程度。
2.1.1 坐标系及参数定义
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: