基于机器视觉的船舶辅助驾驶系统设计毕业论文
2020-02-19 09:40:11
摘 要
随着中国航运事业的发展,船舶数量也大幅增加。与此同时,各种船舶安全事故也接连发生,不仅造成重大的经济损失与人身伤害,而且严重危害着水域环境问题,因此采取必要措施去规避安全事故十分重要。与此同时,大数据、人工智能等高新技术发展热潮势不可挡,也为船舶驾驶提供了新的解决方式。因此船舶辅助驾驶的概念应运而生。
船舶辅助驾驶利用各种传感器获取的环境数据进行动、静态物体的辨识、侦测与追踪等技术上的处理,从而对驾驶员发出信号来提高驾驶安全性。由于可见光图像蕴含着丰富的细节信息,本文采用了可见光图像的目标识别方法,以一种采取船载高清摄像头进行目标识别从而实现船舶辅助驾驶。
本文在阐述基于机器视觉的船舶辅助驾驶系统的基本原理的基础上,对高清摄像头所获取的图像进行图像处理以及特征分析,最后通过神经网络训练实现分类识别。以期帮助船舶驾驶者在最短时间内感知到周围可能发生的危险。提高驾驶安全性。
关键词: 船舶辅助驾驶;机器视觉;图像处理;特征分析;分类识别
Abstract
With the development of China's shipping industry, the number of ships has increased significantly.At the same time, all kinds of ship safety accidents happen one after another, which not only causes great economic loss and personal injury, but also seriously endangers the water environment.Therefore, it is very important to take necessary measures to avoid safety accidents.At the same time, big data, artificial intelligence and other high-tech development boom is unstoppable, also provides a new solution for ship driving.Therefore, the concept of ship assisted navigation came into being.
The environmental data obtained by various sensors are used in the technical processing of motion, identification, detection and tracking of static objects, so as to send signals to the driver to improve the safety of driving.Because visible images contain rich detailed information, this paper adopts the method of visible image target recognition, which adopts shipborne high-definition camera for target recognition to realize ship assisted driving.
In this paper, based on the description of the basic principles of the ship assisted navigation system based on machine vision, the image processing and feature analysis of the images obtained by hd camera are carried out, and finally classification and recognition are realized through neural network training.In order to help the ship driver in the shortest time to perceive the possible dangers around.Improve driving safety.
Keywords:Auxiliary navigation of ships;Machine vision;Image processing; Characteristic analysis;classific
目录
第一章 绪论 4
1.1选题的目的及意义 4
1.2国内外研究现状 5
1.2.1基于雷达技术及红外线技术的船舶辅助驾驶 5
1.2.2基于机器视觉技术的船舶辅助驾驶 5
1.3论文的研究内容及章节安排 7
第二章 船舶辅助驾驶的目标识别 9
2.1引言 9
2.2船舶辅助驾驶的含义 9
2.3船舶辅助驾驶的常用目标识别方法 9
2.3.1基于声纳技术的目标识别方法 9
2.3.2基于雷达技术的目标识别方法 9
2.3.3基于红外线技术的目标识别方法 10
2.3.4基于可见光图像的目标识别方法 10
2.4目标识别方法选取 11
2.5小结 11
第三章 图像预处理及图像分割 12
3.1图像预处理 12
3.1.1图像增强 12
3.1.2图像去噪 14
3.2图像分割 16
3.2.1图像分割方法分类 16
3.2.2边缘分割技术 16
3.2.3区域分割技术 17
3.2.4基于脉冲耦合神经网络(PCNN)的图像分割 17
3.3小结 21
第四章 特征提取与分类识别 22
4.1特征提取 22
4.1.1形状特征 22
4.1.2不变矩 23
4.2分类识别 25
4.2.1 BP神经网络结构 25
4.2.2 BP神经网络系统流程 27
4.3小结 28
第五章 船舶辅助驾驶系统构造 29
5.1硬件设置 29
5.1.1光端机 29
5.1.2摄像头 30
5.1.3单芯光纤 31
5.1.4视频采集卡 32
5.1.5 PC机 32
5.2软件编程 33
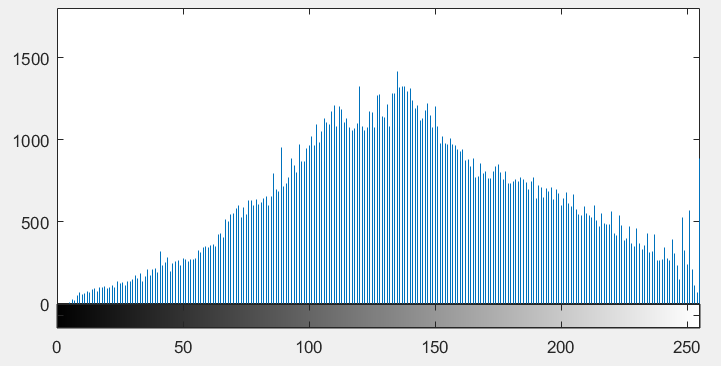
5.2.1图像增强(直方图均衡化) 33
5.2.2图像去噪 33
5.2.3 PCNN图像分割 33
5.2.4特征提取(不变矩) 34
5.2.5 BP神经网络分类识别 34
第六章 总结与展望 35
6.1总结 35
6.2展望 35
致 谢 36
参 考 文 献 37
第一章 绪论
1.1选题的目的及意义
随着中国航运界事业的蒸蒸日上,国内船舶的数量也随着大幅增加。截止2017年末,国内登记船舶总数已达到14.52万艘,船舶数量及运力年年攀升,各水系航路投资建设资金也日渐增加。然而,船舶发生的安全事故也在日益增多,长期以来,船舶相撞、沉船事故不仅对航运公司带来巨大的财产损失,而且导致了许许多多的宝贵生命白白葬送,有些甚至对整个的水域环境带来了不可逆转的破坏和污染。这些都是由于船舶数量急剧增加、通航环境复杂多变而导致的船舶操纵难度问题所引起的。因此,采取有效的措施预防水上事故的发生已经是航运业刻不容缓的任务。水上交通事故统计表明,90%以上的水上交通事故与船员个人的操作疏忽问题有关联,而在这中间至少有60%的事故是由人为失误直接引发的。在水上安全形势日趋复杂的情况下,如何优化水上交通、保障船舶航行安全是船舶航海领域一大重要的研究方向。
而辅助驾驶正是通过安装在船舶上的各种传感器,迅速获取船舶内外的环境数据,然后进行动、静态物体的辨识、侦测与追踪等技术上的处理,使得船舶驾驶员能在最佳时间内察觉周围的危险,从而提高船舶驾驶安全性的安全技术。从船舶水上航行避碰的实际应用出发,环境感知是驾驶辅助技术的基础,环境感知是指设备通过传感器捕获等手段,对所处环境中的环境参数及周围物体的相对距离、角度及运动状态等信息进行获取。通过环境感知获得船舶航行水域环境信息,而后将信息交由处理系统分析和识别,进而做出避碰指令决策以辅助船舶驾驶员的判断。现有感知方式主要有以下五类:水声感知设备、状态感知设备、雷达、融合式传感器和机器视觉传感器。目前投入应用最多的环境感知方案是应用雷达为主要探测装置,状态传感器作为辅助,而受技术发展所限,机器视觉传感器在目前的实际应用并不多。但相比于其他感知技术,基于光视觉的感知技术在对水面目标进行辨别方面有效性更高。究其原因,无非是光学图像中包含着更多细节上的信息,这些细节信息的存在有利于在执行作业过程中对大面积海岸区域航行的船只、低矮悬空的障碍物等信息进行有效的提取,有助于其自主规避障碍物的实现,已被越来越多的研究学者设计研发,在船舶驾驶辅助领域具有重要地位。
为了克服现有船舶辅助驾驶系统的不足,根据船舶实际驾驶安全性和稳定性的需求,利用机器视觉技术对船舶航行时周围环境进行分析处理,对获得的不同环境信息进行判断决策,进而实现船舶驾驶的可靠辅助,该方面具有巨大的应用前景。在加快海洋装备开发和建设海洋强国的背景下,论文对基于机器视觉的船舶辅助驾驶展开研究,进而完善船舶的视觉感知技术,改善水面船舶的环境感知能力,提高其驾驶安全性。通过项目的建设,增强了船载视频监控系统的价值,提高了船舶行驶的安全性,减少碰撞事故的发生,保障交通及财产安全。
1.2国内外研究现状
目前应用于船舶安全辅助驾驶的方法主要有以下4类:基于声纳技术的目标识别方法,基于雷达技术的目标识别方法,基于红外线技术的目标识别方法,基于可见光图像的目标识别方法。由于声纳技术主要用于水下目标识别,本节不予讨论。
1.2.1基于雷达技术及红外线技术的船舶辅助驾驶
(1)日本东京商学院曾在2003年的国际航海大会上提出基于计算机视觉的水上运动船只检测办法,利用基于雷达的视觉感知系统和船舶自动识别系统的协同,实现船只的主动避让。
(2)以色列航空防御系统公司与拉斐尔武器设计局共同研发的“protector”号USV以刚性充气艇为基础,并在气艇上配备先进的导航雷达,光电指示器,全球定位系统,红外传感器等现代化设备,通过雷达系统及红外技术能够探测到敌方目标。
(3)2015年11月,国际工业博览会上展出了我国第一艘针对水域环境测绘的“精海号”智能无人船。该系列智能无人船是由上海大学研制出来的。目前其开发研制的最新型号即“精海4号”无人测量船有两种作业模式,一种是自主航行模式,而另一种则是遥控操作模式。该无人船上搭载了许多高科技的环境感知工具,如激光雷达、摄像机等电子设备。在数据传输方面,除了可以选择通过无线电台对数据进行传输外,还可以选择基于4G网络通讯的传输方式。
1.2.2基于机器视觉技术的船舶辅助驾驶
(1)斯莱斯主导的Advanced Autonomous Waterborne Application项目正在各种操作中和不同的天气条件中测试机器视觉传感器数组并且已经研究出了一套模拟自主船舶控制系统实现完全通信系统的研发。海运创新协会副主席说到,我们将在2020年前实现远程控制船舶在商业上的应用。
(2)2008年我国第一艘自主研制的天象一号无人船进行水下实验并取得圆满成功。该无人船的整体操作系统主要有两大板块:地面控制系统和海上无人探测平台。该无人船的航行方式有两种,一种是远程控制模式,该模式需要操作人员全程参与;另一种是自动驾驶模式。当无人船处于自动驾驶模式时,它可以按照提前设定好的航行路线完成指定的航行任务。同时,在航行的过程中如果沿途遇上海上障碍物,该无人船还可以利用船载高清摄像机所采集的图像图像进行目标检测与识别等算法实现船舶安全辅助驾驶。
(3)“Silver frog”号USV是一个多任务通用平台。它是由上海海事大学研制,该USV配备高清摄像机等环境感知设备。USV上高清摄像机所获得的实时图像通过无线网络传送给岸基监控系统,操作人员根据岸基监控系统所传回的信息下达控制指令完成船舶辅助驾驶。
(4)珠海云洲智能科技是我国首个研发制造无人船的企业。其制造的产品涉猎“水文地质勘探”、“安防与抗洪抢险”、“水环境监测与应急”等相关领域,其研发制造和无人船生产水平在全世界都处于领先地位。其开发研制的水上救助无人船是一款十分具有现代化意义的水面无人船。该水面无人船在接到警报后可以自主航行到出事水域进行搜索侦察,通过船载摄像头将事故发生现场的画面实时传回控制基站,操作人员据此进行进后续操控并利用救生筏将受助人送至安全地带。
而基于机器视觉的船舶辅助驾驶技术的关键在于基于机器视觉的水面图像处理技术,因此下面介绍基于机器视觉的水面图像处理技术研究现状:
安装于各类船舶上的机器视觉传感器即数字摄像头作为感知设备具有独特的优势。不仅成本低、易实现,而且它所采集的图像所包含的细节信息多、分辨率高。而且它所采集的图像所包含的细节信息很多。虽然它和应用于港口的监控摄像头一样,背景与前景都是随时间变化的,但由于船载摄像机所处环境的复杂性,加上实时性的要求更高等原因,船载摄像机所获得的图像数据更难处理。
水面目标检测技术:图像处理方法在20世纪90年代就开始应用于检测和识别海上弱小目标。基于机器视觉的船舶检测技术目前已经应用于船只导航。近年来,由于船舶驾驶自动化以及船舶辅助驾驶的发展需求,在不同状况的水域下环境图像中检测特定目标变的越来越重要。
国外,SergiyFefilatyev等通过海天线及处于海天线上的异物检测候选目标,并根据连续帧的结果来确定真实目标。Smith等人利用海面颜色分布比较均匀的特点,采集小窗口的波浪直方图作为匹配模板以区分波浪和非波浪,但是实际上海面的颜色往往是由近及远地渐变的,局部小窗口的颜色分布不能代表全局,实践表明这种方法精度不高。国内,董宇星等提出了先利用灰度特性提取海天线,然后利用一维最大熵阈值分割法对目标进行检测,该方法在海面状况较恶劣时欠佳。如果对近海目标采用类似弱小目标检测方法,很可能会把海面附近的强噪声点作为目标,造成很高的虚警率。相关论文表明,暂时未见效果较好的既适用于海天背景,又适用于海岸背景,既适用于远小目标,又适用于近处目标的实时检测方法。
1.3论文的研究内容及章节安排
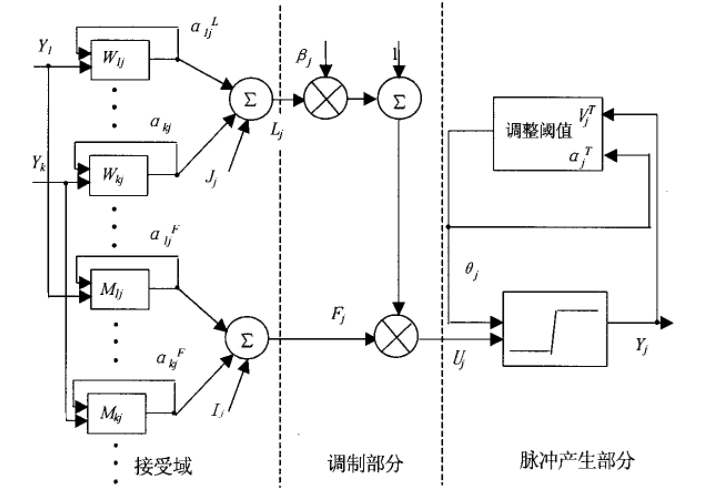
船舶在危险规避及自主航行的过程中,基于其搭载的机器视觉传感器对周围环境的实时感知,通过决策规划系统发出运动指令。由于船舶拥有六个自由度及惯性大的运动特性,受气象因素影响大,要求较高的系统可靠性及较好的图像采集设备,计划配备高清摄像机获取水面图像。并依靠磁浮力包裹悬浮镜头,通过补偿镜片组(画面防抖技术)使得画面清晰。然后利用MATLAB 2016a进行图像处理,包括图像预处理(直方图均衡化算法进行图像增强;中值滤波算法进行图像去噪),基于PCNN遗传神经网络的图像分割,基于HU不变矩的特征提取,最后基于BP神经网络进行模式识别。然后将识别后得到的信息传回控制系统以此来达到辅助驾驶的目的。
本文对船舶上高清摄像机采集得到的水面图像进行船舶图像的目标识别研究,主要的研究内容如下:
(1)了解并掌握现有船舶辅助驾驶系统的一般形式。
(2)分析船舶辅助驾驶系统的功能要求和实际工况条件。
(3)完成适用于船舶驾驶环境的机器视觉算法设计,并提出完整方案。
(4)完成系统的整体设计。
本文具体的研究内容共分为六章:
第一章:绪论。本章的内容主要介绍了与本课题相关的研究背景及意义,船舶辅助驾驶中目标识别的国内外发展现状以及水面图像处理技术领域的现状。同时本章还介绍了本论文的主要研究内容及章节安排。
第二章:船舶辅助驾驶的目标识别方法。本章首先介绍了船舶辅助驾驶的含义,然后对于船舶辅助驾驶所使用的四种目标识别方法进行分类介绍并逐一论述其优缺点。
第三章:图像预处理和图像分割。本章首先介绍了图像预处理的方法包括图像增强和图像去噪,通过图像预处理获得了更加适合于后续处理的图像。接着介绍了两种传统的图像分割方法。最后对基于PCNN的图像分割进行介绍并通过matlab上的仿真结果对图像分割效果进行了分析。
第四章:特征提取和分类识别。首先选取了不变矩作为船舶图像的特征向量,然后通过BP神经网络对船舶图像样例进行学习,最后实现其对特征数据的识别。
第五章;系统构造。首先介绍了基于机器视觉的船舶辅助驾驶系统的构成。接着介绍了一些软件编程的函数。最后通过matlab进行验证。
第二章 船舶辅助驾驶的目标识别
2.1引言
在船舶驾驶安全问题亟待解决的背景下,我们致力于发展船舶辅助驾驶技术来提高船舶驾驶的安全性。下文基于什么是船舶辅助驾驶以及船舶辅助驾驶的常用目标识别方法进行了探讨。
2.2船舶辅助驾驶的含义
船舶辅助驾驶通过安装在船舶上的各种传感器,迅速获取船舶内外的环境数据,然后进行动、静态物体的辨识、侦测与追踪等技术上的处理,使得船舶驾驶员能在最佳时间内察觉周围的危险,从而提高船舶驾驶安全性的安全技术。同时可以为驾驶员提供推荐航线,全天候作业,三维实时管控等功能。
船舶辅助驾驶的实现主要是由目标识别技术、路径规划、动力设备等实现,而其中的核心及基础就是目标识别技术。
2.3船舶辅助驾驶的常用目标识别方法
2.3.1基于声纳技术的目标识别方法
声纳技术就是以各种形式利用水声的系统,是一种理想的在水下进行探测与环境感知的手段。因为声波在水中的传播距离远而且适用于水下复杂多变的水文环境。声纳这门工程科学的主体就是水下声波的应用。声纳技术目前可以应用于完成水下目标的目标定位、模式识别、跟踪运动目标等工作。
近年来由于科技水平的迅猛发展,声纳技术的进步也随之突飞猛进,学者对于声纳技术的研究成果也越来越多,对声纳技术的理解也达到了很深的程度。目前的声纳全息成像系统已经可以达到接近光学图像质量的效果。可惜的是尽管得到的声图像质量较好却在现实环境中并不适用。
2.3.2基于雷达技术的目标识别方法
雷达系统一直以来都是用于远距离目标探测、跟踪检测的有力工具。以前人们用雷达检测仅仅用来获取目标的位子及运动参数。而近年来现代雷达技术已经转变为对目标物体进行分类识别的雷达测量。这是因为学者对于超宽带雷达技术的研究已经取得很大成功,加上模式识别技术的已经发展得很成熟。
雷达自动识别的主要任务是根据采取的雷达回波信息进行分类判断,根据采取的回波特征不同,其识别方法一般包括如下几种:
- 基于目标回波调制与起伏特性的目标识别方法。该方法的可靠性比较差,因为这个方法是根据经验判断来进行分类识别的。
- 基于目标极化特征的识别方法。该方法根据极化特性的不同来区分目标。极化特性一般为散射矩阵。该方法对于雷达要求较高,且复杂目标本身的他习惯变化就大,难以识别。
- 基于高分辨雷达成像的目标识别方法。
2.3.3基于红外线技术的目标识别方法
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
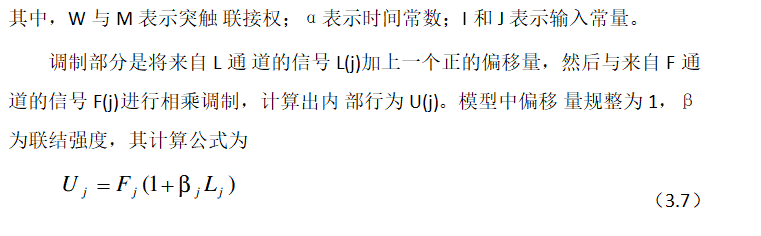
相关图片展示: