自动泊车功能评价方法及其测试系统方案设计毕业论文
2020-02-18 10:43:48
摘 要
自动泊车系统作为智能汽车技术的重要组成部分,已成为当下一个热门的研究课题。自动泊车技术可以在无人驾驶的情况下安全快速的完成泊车作业,提高驾驶舒适性,同时大大降低了泊车事故发生的概率,本文对现有自动泊车系统展开了研究,分析了自动泊车系统的发展现状,包括国内外研究现状、市场应用情况、系统架构、工作流程和待解决的问题。在此基础上,提出了自动泊车系统的功能评价指标,用于评判自动泊车系统性能的优劣。基于提出的评价指标,设计了一个自动泊车系统功能评价测试系统方案。本文所取得的主要研究结果如下:详细调查研究了自动泊车系统的现状、市场应用情况,分析了其系统架构和工作流程;分析了自动泊车系统所面临的问题,基于寻泊时间长和泊车效果差等问题提出了评价自动泊车系统功能优劣的自动泊车系统的评价指标;基于评价指标,设计了一个简单易操作的的的自动泊车系统的测试评价系统。
关键词:自动泊车系统;评价指标;测试系统
Abstract
As an important part of intelligent vehicle technology, automatic parking system has become a hot research topic. Can automatic parking technology under the condition of the unmanned safety quickly complete parking operation, improve the driving comfort, greatly reduce the probability of parking accident happened at the same time, the research in this paper, the existing automatic parking system, analyzes the development status quo of automatic parking system, including domestic and foreign research present situation, market application, the system architecture, working process and problem solving. On this basis, the function evaluation index of the automatic parking system is proposed to evaluate the performance of the automatic parking system. Based on the proposed evaluation index, a functional evaluation test system of automatic parking system is designed. The main research results obtained in this paper are as follows:the status quo and market application of the automatic parking system are investigated in detail, and its system architecture and workflow are analyzed;The problems faced by the automatic parking system are analyzed, and the evaluation indexes of the automatic parking system are proposed to evaluate the functions of the automatic parking system based on the problems such as long berth seeking time and poor parking effect.Based on the evaluation index, a simple and easy to operate automatic parking system test and evaluation system is designed.
Keywords: Automatic parking system; Evaluation index; Test the system.
目录
摘要 I
Abstract I
第1章 绪论 1
1.1 研究目的及意义 1
1.2 国内外研究现状 1
1.3 本文主要工作内容 2
第2章 自动泊车系统介绍 3
2.1 自动泊车系统架构 3
2.2 自动泊车系统的工作流程 3
2.3 自动泊车系统国内外研究现状 5
2.3.1 自动泊车系统停车位识别技术研究现状 5
2.3.2 自动泊车系统路径规划及路径跟踪技术研究现状 6
2.4 自动泊车系统市场应用现状 6
2.5 本章小结 7
第3章 自动泊车系统功能评价指标探讨 9
3.1 评价指标的提出 9
3.2 评价指标的内容 9
3.3 评价指标的优缺点 13
3.4 本章小结 13
第4章 测试系统的设计 14
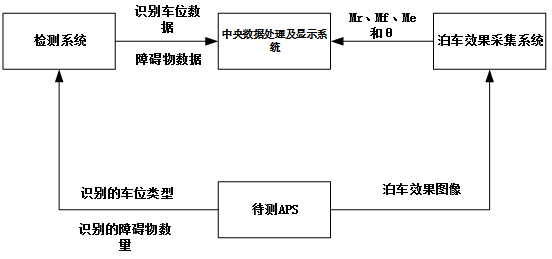
4.1 测试系统的系统架构 14
4.1.1 检测系统 14
4.1.2 泊车效果采集系统 15
4.1.3 中央数据处理及显示系统 15
4.2 测试系统的工作流程 15
4.2.1 测试环境条件及场景介绍 15
4.2.2 自动泊车系统功能评价测试系统工作流程 15
4.3 测试系统的优缺点 17
4.4 模拟测评过程 20
4.5 本章小结 21
第5章 总结与展望 22
5.1 研究内容总结 22
5.2 今后工作展望 22
参考文献 23
致谢 25
第1章 绪论
1.1 研究目的及意义
目前,随着各大城市汽车保有量的增加,有限的城市空间内使得泊车空间越发狭小,增加了驾驶员泊车入位操作的困难性。复杂多变的泊车环境以及有限的视野范围,频频导致泊车事故发生。为解决城市泊车入位困难的问题,自动泊车系统逐渐深受各大汽车厂商、国内外科研和工程技术人员的关注。
近年来,随着人工智能和传感技术的快速发展,智能驾驶成为了研究热点,其中易于产品化的技术-自动泊车系统已经被各大厂商量产推出,但市场反响一般,如何评判自动泊车系统的“优劣”成为了摆在面前的难题。
基于对自动泊车系统的认知,给出可靠的定性和定量的评价指标和设计出一个可行功能测试评价系统,不仅能帮助广大用户逐渐提高对新技术的体验感,也将进一步促进该系统的可持续健康发展,提升该系统的市场装备率,推动智能汽车的发展。因此对自动泊车系统的功能测试及评价方法的研究就显得非常必要。
1.2 国内外研究现状
通过查阅和研究相关文献,发现目前针对自动泊车系统(Automatic parking system,简称APS)功能评价的研究相对较少。国内外目前主要参考的标准是国际标准化组织(International organization for standard,简称ISO)2017年发布的ISO 16787-2017《Intelligent transport systems — Assisted parking system (APS) — Performance requirements and test procedures》,该文件规定APS的主要测试标准是车辆在泊车位内的末端位置。本文接下来选取的评价指标和所设计的测试系统也将根据此标准来选取以及设计。国内对于自动泊车系统功能测试的研究方式多为举办各种智能汽车大赛,通过完成一定的任务而给予打分,通过成绩评价该系统的功能的优劣[1]。不过也有相关学者从消费者对自动泊车系统的认知方面展开研究,黄培培等人采用消费者调研的方法,了解中国消费者对自动泊车系统的认知及评价,从满足消费者需求的角度提出了自动泊车系统的评价指标[2]。2018年2月6日,中国汽车研究学会和i-VISTA管理中心召开发布会,正式发布《中国智能汽车指数评价规程(征求意见稿)》。本次发布的《中国智能汽车指数评价规程(征求意见稿)》,主要针对市场上各类智能驾驶辅助系统,例如ACC自适应巡航控制系统、AEB自动紧急制动系统、APS自动泊车辅助系统等,进行相应地单独评价,其中APS的评价主要包括体验评价和安全评价。
1.3 本文主要工作内容
对目前自动泊车系统功能测试及评价的研究现状分析后,根据目前所存在的问题,明确了本文的研究内容。首先研究分析自动泊车系统,然后提出相应的功能评价指标及相应的测试系统。为此本文的研究内容主要从以下几点展开:
(1)深入研究自动泊车的系统架构和工作流程,分析自动泊车系统的国内外发展现状和自动泊车系统的市场应用;
(2)基于对自动泊车系统的认识和了解,提出具有研究意义的评价指标;
(3)基于提出的评价指标,设计一个评价测试系统方案。
第2章 自动泊车系统介绍
2.1 自动泊车系统架构
作为先进的智能驾驶辅助系统,自动泊车系统主要由三大部分组成,如图2.1所示。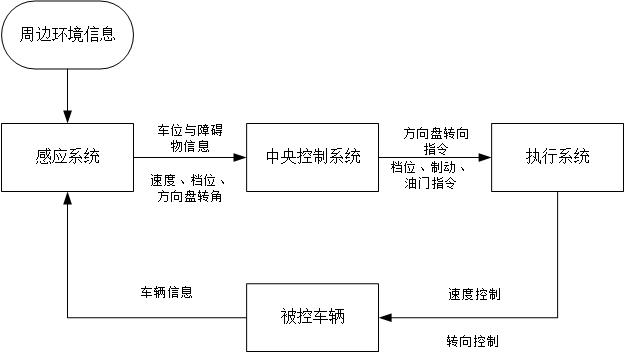
图2.1自动泊车系统架构
(1)感知系统。该系统一方面通过超声波传感器、雷达传感器和视觉传感器来探测周边环境信息,在泊车过程中实现车位的检测和障碍物的相对距离探测。另一方面该系统通过轮速传感器、档位传感器和转角传感器等获取车辆自身的状态信息。在泊车阶段,泊车系统的中央控制系统是根据感应系统反馈的信息进行车辆泊车运动的控制,可见,感应系统乃APS的基础。
(2)中央控制系统。该系统为 APS 的核心部分,该系统一方面接收由感知系统传来的周围环境信息,计算车位的有效长度和宽度,从而得出准确的泊车位; 另一方面,根据泊车位信息和车辆所在位置规划出最优的泊车路径,并发出控制指令(如方向盘的转角、档位、制动等信号)。除此之外,在泊车过程中,还要实时监测,防止突发状况,以确保泊车过程安全可靠。
(3)执行系统。该系统接收到中央控制系统的指令后,操作各执行机构完成相应的动作,如方向盘转角、制动、档位切换等,控制汽车完成泊车工作。因此,执行系统是自动泊车系统至关重要的组成部分。
2.2 自动泊车系统的工作流程
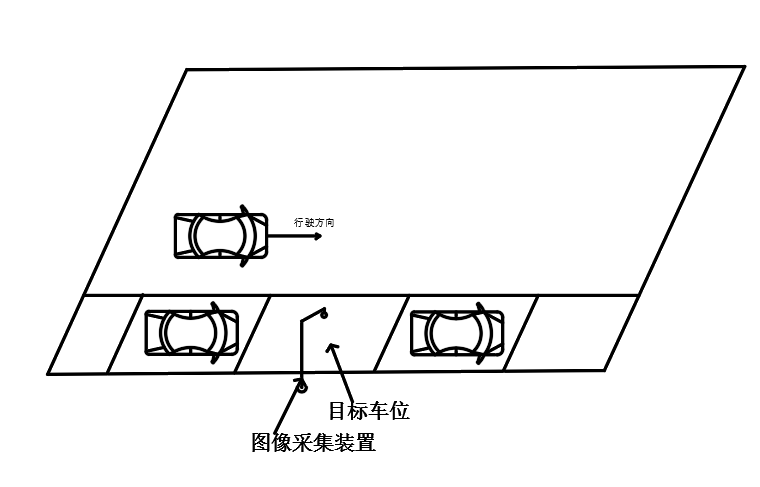
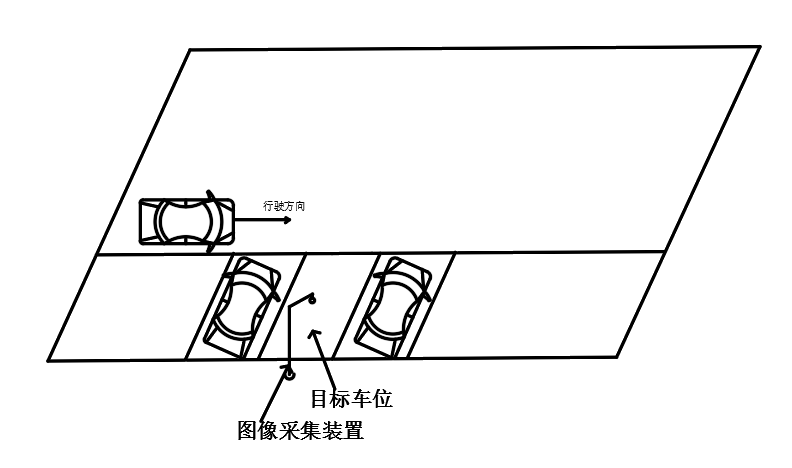
目前常见的停车位主要有一下三种:平行车位、垂直车位和斜车位。其中,平行式车位又可分为双边界车辆平行车位、单边界车辆平行车位和白色标线平行车位;垂直车位同样可分为双边界车辆垂直车位、单边界车辆垂直车位和白色标线垂直车位。根据车位类型可将泊车类型分成以下三种类型,如图2.2所示。
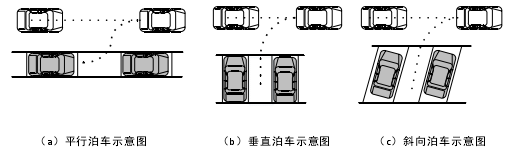
(a)平行泊车 (b)垂直泊车 (c)斜车位泊车
图2.2 泊车类型示意图
其中平行泊车和垂直泊车是日常生活中最常见的泊车类型,为此本文主要针对这两种泊车工况进行研究,开展测评工作。各个泊车类型泊车过程大致相同,表述如下:
(1)开启自动泊车系统;
(2)感知系统各传感器开启,检测泊车位,若检测到有效车位,则显示有效车位信息;
(3)中央控制系统根据车位信息进行泊车路径的规划;
(4)车辆缓慢前进,车辆到达泊车的起始点区域;
(5)进行车辆泊车运动控制实现泊车路径的跟踪;
(6)车辆到达目标泊车位或泊车过程中手动干涉方向盘,泊车结束,关闭系统。
自动泊车系统大致流程图如下图2.3所示。
2.3 自动泊车系统国内外研究现状
自1990年以来,许多学者不再满足于传统汽车技术的研究,开始进军智能汽车驾驶辅助系统研究领域,知名的汽车企业也开始在新车型上配备一些智能驾驶辅助系统,例如自适应巡航系统和泊车辅助系统等。目前,国内外对于自动泊车系统的研究主要集中于两项关键技术:停车位识别技术和路径规划及路径跟踪技术。
2.3.1 自动泊车系统停车位识别技术研究现状
停车位识别技术的提高有利于提高泊车效率,该技术的提高还要依赖于车载传感器的发展,传感器精度越高泊车位检测就越准确。车载传感器一般都安装于车辆周围,有利于获取车身周围环境信息,从而实现车位和障碍物的识别。进入21世纪以来,传感技术得到快速发展,车载传感器的种类也变得丰富起来,由最初的单一的超声波传感器检测发展到了如今的多传感器交互检测,如超声波传感器、雷达传感器、激光雷达传感器和视觉传感器等交互检测,停车位识别技术随着传感技术的发展也变得多样化。
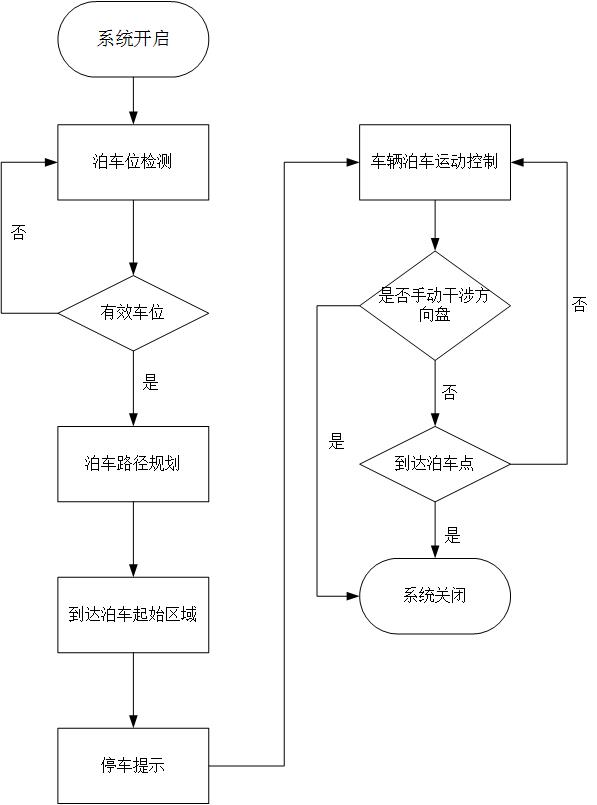
图2.3自动泊车系统工作流程图
学者Ma S等人[3]利用机器视觉和模式识别技术引入到智能识别一个垂直停车的情况下,实现对泊车位的识别。Jeong等人[4]通过在车辆前轮两侧布置两个超声波传感器,就可完成车位识别任务。J Xu[5]则通过安装视觉传感器,再结合RCE神经网络获取泊车位信息。史晓磊[6]采用了高精度的激光雷达传感器配合自主设计的感知系统实现了对泊车位的精确检测。李晏等人[7]用四个安装在样车前、后、左、右位置的鱼眼摄像头对车位进行检测,并识别出可行的泊车位。何锋[8]提出一种基于超声波传感器和增量式编码器的车位识别方法,并通过实验证明了此方法是可行的。李磊[8]利用计算机视觉技术识别地面停车位标记线来完成停车位的检测和识别,该系统能够在复杂场景下更加准确、安全、快捷的实现停车位的检测和识别。江苏大学的沈峥楠[10]搭建了多传感器环境感知架构,通过多传感器信息融合,不仅实现了规则车位识别,还实现了不规则车位的识别。任坤等[11]针对车位搜索困难的问题,提出了一种在未知环境信息下的通过机器视觉进行车位识别的方法,该方法能有效避免利用超声波传感器检测车位时左右必须有车的弊端。
2.3.2 自动泊车系统路径规划及路径跟踪技术研究现状
由于停车环境的复杂性,很难建立人工智能控制模式,很难通过模糊控制器和神经网络建立智能的控制模式来完全模拟合格司机的操作行为,且采用这种方法的适应能力不强,容易受到外界环境的影响。为此,许多国内外研究人员进行了大量研究,探讨如何根据路径规划和路径跟踪来控制车辆实现泊车。
早期,Fruchard等[12]提出一种滑膜控制方法,要求机器人速度只要不为零,就可实现对轮式机器人路径跟踪的完美控制。T Tashiro[13]在垂直泊车类型中的路径跟踪中引入了MPC模型预测控制器,不过运用场景比较单一。湖南大学的李红[14]采用了B样条理论进行路径规划和提出了结合定点跟踪的非时间参考路径跟踪控制策略,降低了泊车系统对驾驶员车速的控制要求,提高了泊车成功率。吉林大学的雷典[15]通过采集驾驶员的泊车行为并进行分析,提出了基于模糊层次分析法的泊车轨迹动态决策方法以及设计了车辆泊车方向PID控制模型,并采用遗传算法对PID的参数进行优化。哈尔滨工业大学的李韬[16]采用多项式进行路径规划,此方法计算简便,可保证路径曲率连续,同时满足转向要求,并通过MATLAB/Simulink软件平台对泊车路径进行跟踪仿真。同济大学的徐津津[17]在垂直泊车中首次提出双向路径规划的方法,实现了从高约束区域向低约束区域的路径规划,该方法能出色的完成泊车和避障任务。北京工业大学的徐春玲[18]针对复杂多变的平行泊车环境,提出了一种参考人工泊车经验的分阶段泊车轨迹规划方法,该方法可利用之前存储好的指令数据在面对一种新的泊车场景时,可跳过路径规划阶段,快速泊车。
2.4 自动泊车系统市场应用现状
自动泊车系统从1992年诞生以来,自动泊车技术技术得到了快速的发展,目前大多数汽车厂商都已经将自动泊车技术发展为半自动泊车系统:能自动利用车载传感器来实现车位的识别,并在泊车过程中辅助操控方向盘,驾驶员只需控制加速和制动踏板。从一开始的高端轿车才会选配,到如今此类系统已应用相对普遍,如迈腾、大众途观、凯迪拉克CTS、奔驰B200等车型。一些主流汽车厂商更是将自动泊车技术发展为全自动泊车系统,亦称全自动代客泊车系统,可以代替驾驶员独立完成泊车工作。装备全自动泊车系统的车辆,驾驶员只需到达目的地后即可下车,然后通过智能软件给汽车发出指令,车辆根据指令会自行前往泊车地点完成泊车任务,并熄火锁好车门。此类系统较为先进,一般仅在少数豪华车型所应用且依托车联网技术的发展。 目前在斯图加特的梅赛德斯奔驰博物馆停车库里,博世与戴姆勒携手将代客泊车系统变为现实,通过智能手机就可将汽车停放在指定的位置且无需其他任何操作,这其中都多亏了博世提供的车载技术和智能停车库基础设施之间的相互作用[18]。
相对于国外,国内虽然发展较晚,但近几年也取得了较为不错的成绩,2018年1月10日小鹏汽车G3在美国CES国际电子消费展上全球亮相,中国造车新势力首次在CES展发布新款智能汽车车型。小鹏汽车G3全车身装备20多个智能传感器,实现多个传感器信息融合,具有强大的感知系统,能实现对多种车位的精确识别,并具有出色的泊车入位能力[20]。
另外还有许多老牌国产汽车厂商纷纷与互联网公司合作,如吉利、广汽、一汽与上汽等都在开发自动泊车技术,并将其应用到量产车型上。截止到2017年,国内市场装配APS的主要车型如表2-1所示。
表2-1 装备APS的主要车型
企业 | 车型 | |||
北京现代 | 胜达、索纳塔 | |||
东风日产 | 奇骏 | |||
东南汽车 | 东南DX7 | |||
广汽本田 | 奥德赛 | |||
上汽通用 | 科鲁兹、威朗 | |||
神龙汽车 | 标致308S、标致408 | |||
沃尔沃 | 沃尔沃S60L | |||
一汽大众 | 奥迪A3、奥迪Q3、CC、迈腾 | |||
一汽丰田 | 皇冠、锐志 | |||
长安福特 | 蒙迪欧、翼虎、金牛座、锐界 | |||
2.5 本章小结
本章对自动泊车系统进行了比较详细的介绍,介绍了自动泊车系统的组成、自动泊车系统的工作原理,目前泊车系统的所采用的技术,以及在市场上已经应用该系统的车型。通过介绍,加深对自动泊车系统的认知。
第3章 自动泊车系统功能评价指标探讨
3.1 评价指标的提出
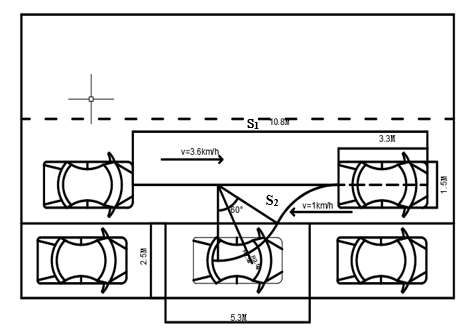
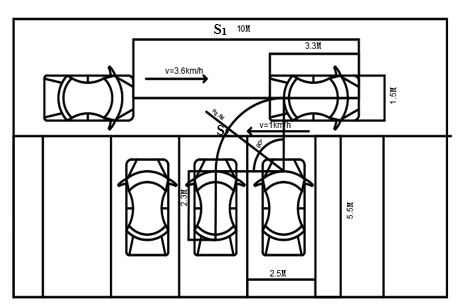
通过前面对自动泊车系统的系统架构及工作过程的分析,可知APS泊车能力可分为车位搜寻能力、泊车能力以及障碍物检测能力。车位搜寻能力的优劣体现在该APS在被开启后是否能快速地搜索到有效车位,泊车能力的优劣则体现在该系统能否根据已检测到的有效车位快速规划泊车路径以及泊车效果的好坏。障碍物检测能力则体现在APS是否能有效检测出路面或泊车位中存在的障碍物,确保泊车过程的安全性。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: