无人驾驶汽车路径跟踪控制设计与研究毕业论文
2020-02-18 10:39:42
摘 要
随着社会经济和科学技术的发展,汽车行业已进入新的发展阶段。智能汽车就是未来汽车产业的重要发展方向之一。智能汽车能满足无驾驶能力人群的出行需求,也是解决交通安全,拥堵等问题的重要方法。因此,本文从智能车辆关键技术之一的轨迹跟踪控制入手,对其中车辆的横向运动控制进行研究。
本文对智能车辆轨迹跟踪控制的研究现状进行简要介绍,并基于模型预测控制算法开展对智能车辆的横向运动控制。首先,在一定的理想化条件下建立车辆动力学非线性模型,并利用魔术轮胎公式,确定轮胎的线型工作区。其后,详细阐述模型预测控制理论的工作原理和组成,并基于该理论完成控制的设计。最后,在软件CarSim/Simulink中联合仿真,以检验控制器的工作性能。
软件仿真结果表明,在一定约束条件以及选用合理的控制器参数情况下,控制器表现出较好的跟踪性能,并对不同车速表现出适应性。
关键词:无人驾驶汽车,轨迹跟踪控制,模型预测控制,车辆横向运动控制,联合仿真
Abstract
With the development of economy, science, and technology, the automotive industry has entered a new stage. Autonomous driving is an important research area in automotive industry. Autonomous vehicles can not only satisfy the travel needs of people without driving ability, but also provide solutions for traffic safety, congestion, and other issues. Trajectory tracking control is one of the key technologies in autonomous driving. This thesis focuses on the lateral motion control of a vehicle.
In this thesis, the research status of autonomous vehicle trajectory tracking control is briefly introduced. The lateral motion control of autonomous vehicles is carried out based on a model prediction control algorithm. In Chapter 2, the vehicle nonlinear dynamics model is established under idealized conditions, and the linear working area of the tire is determined via the magic tire formulation. In Chapter 3, the working principle of the model predictive control theory is elaborated. Based on the model predictive control theory, the vehicle path tracking controller is designed. In Chapter 4, the simulative analysis of the controller adopts the CarSim/Simulink joint simulation method to verify the performance of the controller.
The results show that the controller has good tracking accuracy and vehicle stability under constraints. Besides, the controller shows adaptability to different speeds.
Key words: Self-driving vehicles, Path tracking, Model predictive control, Lateral motion control, Joint Simulation
目录
第1章 绪论 1
1.1 研究背景和意义 1
1.2 轨迹跟踪控制研究现状 3
1.3 本文主要研究内容 5
第2章 建立车辆模型 6
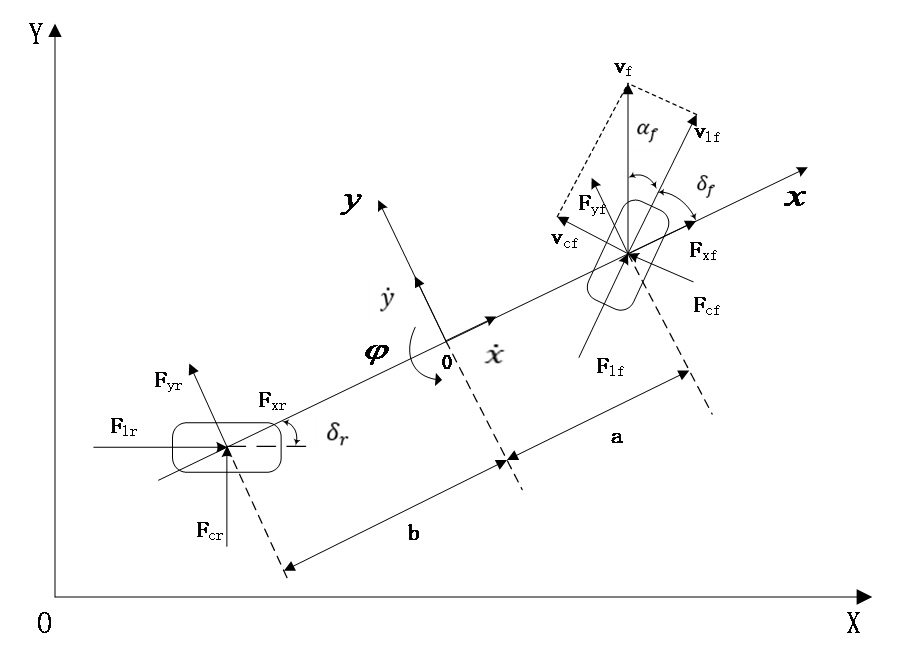
2.1 车辆参考坐标系 6
2.2 车辆动力学模型 6
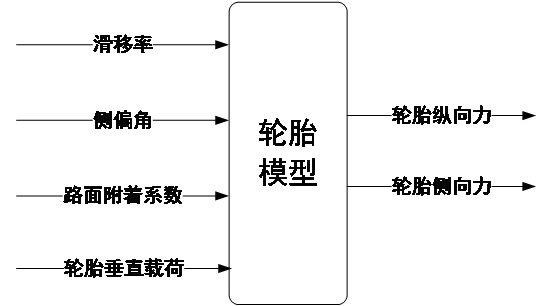
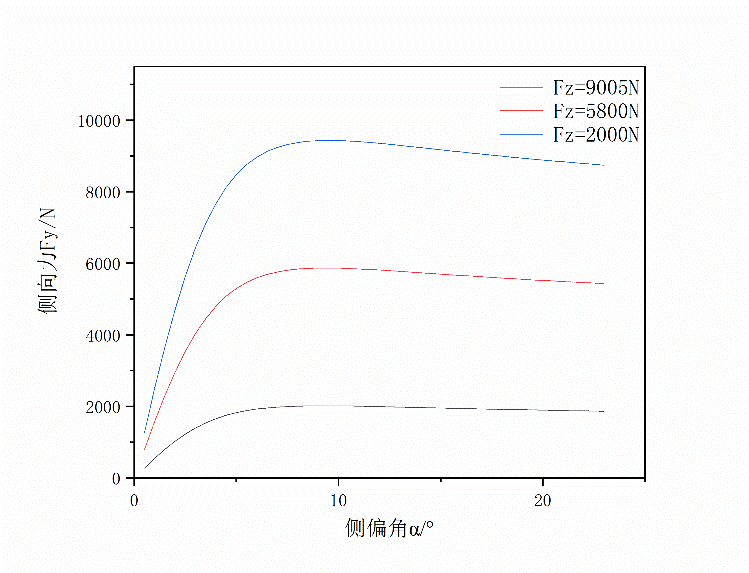
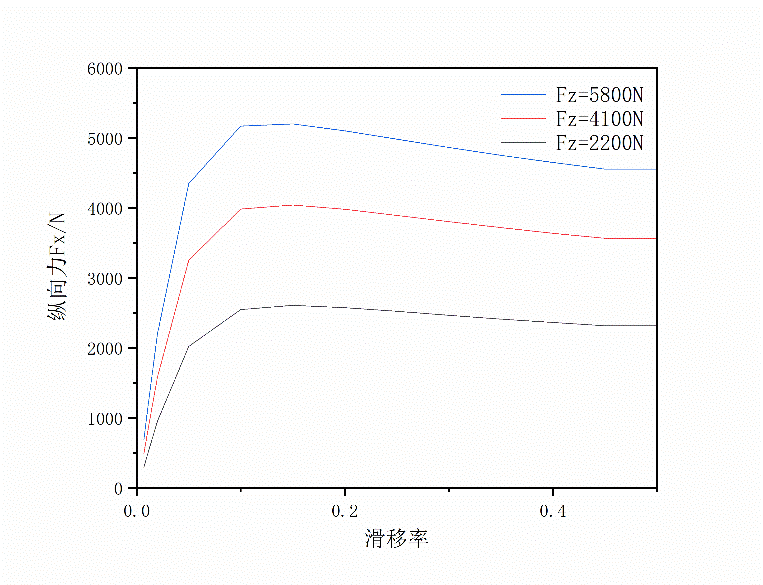
2.3 车辆轮胎模型 9
2.4 车辆系统模型 10
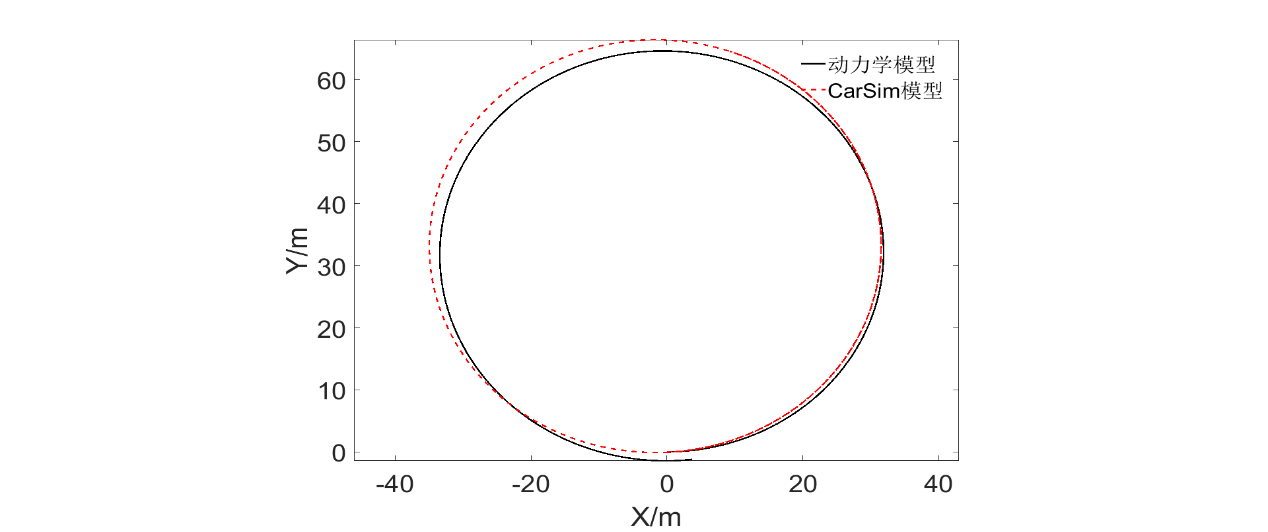
2.5 车辆动力学模型验证 11
2.6 本章小结 12
第3章 模型预测控制 13
3.1 模型预测控制发展 13
3.2 基本原理 13
3.3 线型时变模型预测控制 15
3.3.1 预测方程 15
3.3.2 优化目标 16
3.3.3 反馈校正 16
3.4 线性化模型 16
3.5 本章小结 17
第4章 控制器设计和软件仿真验证 18
4.1 控制器工作原理 18
4.2 模型预测控制器设计 19
4.2.1误差方程 19
4.2.2 设定目标函数 20
4.2.3 控制约束 21
4.2.4 参考轨迹 23
4.3 软件仿真 25
4.3.1 CarSim软件简介和设定 25
4.3.2 不同工况下的仿真验证 28
4.4 本章小结 32
第5章 全文总结和工作展望 33
5.1 工作总结 33
5.2 未来工作展望 33
参考文献 34
致谢 36
第1章 绪论
1.1 研究背景和意义
近年来,人们物质生活水平日益提高,汽车保有量也不断攀升的同时人们对交通出行的要求也越来越高,无人驾驶汽车就是现代科技发展和人们美好出行愿望下的产物。城市化进程的推进,城市中心的房价飞涨,很多家庭只能选择在城市中心工作而在边缘地区购买房子,此外城市内的顶尖资源如,医疗,教育等仍处于城市中心地带,所以不只年轻人,老人,小孩以及残疾人等这些无驾驶能力的人群也有了更多的出行需求,虽然公共交通能解决一部分人的出行问题,但便捷性较差。智能汽车就能帮助解决这部分人的出行需求。在成熟的智能汽车上,乘客不需要过多的参与驾驶工作,汽车可以根据你的出行要求,将你安全运送到目的地。因为这种汽车上装有相当于汽车的“眼睛”、“大脑”和“脚”的识别,判断和运行装置,这些装置由基础硬件装备和复杂的程序组成,以使车辆能像人一样进行“思考”,自行完成启动、加速、刹车,转弯等驾驶行为。
随着汽车工业快速发展,汽车保有量不断攀升,数据显示,截止2018年,我国机动车保有量已超过三亿量。如此高的保有量一方面反映了我国经济发展、国内生产总值、人均国内生产总值等的快速增长,但同时也由此带来了一系列的负面问题。首先,据我国官方统计数据显示,近年来我国每年因交通事故死亡的人数为六到七万人,高居世界前列。而在对交通事故原因的分析中发现:在构成交通事故的人、车、交通环境三要素中,人由于驾驶经验技能不足、酒驾以及疲劳驾驶等问题,占到了事故原因中的55%-90%[1]。并且由于汽车数量.大幅增加也造成城市交通拥堵。因为交通拥堵又会产生一系列.资源消耗,环境污染等问题。汽车噪声和车辆尾气排放也对环境造成了.极大的污染。
针对上述的一系列问题,发展智能汽车已经成为世界各国的共识。而研发智能汽车的意义又远超越于此。智能车辆的发展有助于减少交通事故;智能车辆的发展有助于改善交通拥堵情况;智能汽车的发展有助于改变现有汽车所有权模式,减少地球资源的浪费;智能汽车的发展科带动基础工业和信息化行业的再进一步;智能汽车的发展也将促进新型交通秩序的建立等等。汽车智能化技术已成为汽车工业界及学术界的研究热点,除各大汽车企业以及零部件供应商外,许多互联网公司也在不断加大.对相关技术和产品的开发力度,如知名度较高的Tesla和谷歌旗下的Waymo公司, 及其“激光雷达”方案、百度的无人车自动驾驶系统、阿里达摩院的智能交通实验室等等。与此同时各国家政府也表现出极大重视,各国均相继出台了限制燃油车产销的.时间和鼓励智能车发展的一系列的重要.举措,如在“中国制造2025”中明确指出汽车智能化是我国汽车产业升级发展的方向之一以及智能车测试规范的建立。此外,近年来国外的机构对智能车辆的已对自主化水平进行划分[2],其中第二级的部分自动驾驶是目前各大车厂的主流,如表1.1所示
表1.1 自动驾驶分级
自动驾驶定义及分级 | |||||
SAE等级 | 名称 | 概念 | 动态驾驶任务 | 设计的使用范围 | NHTSA标准等级 |
0 | 无自动驾驶 | 由驾驶员执行全部的动态驾驶任务 | 驾驶员 | 不可用 | 0 |
1 | 辅助驾驶 | 系统可执行车辆运动控制中的某一子任务 | 驾驶员 系统 | 有限 | 1 |
2 | 部分自动驾驶 | 系统可执行车辆运动控制任务,驾驶员负责执行OEDR任务并监督自动驾驶系统 | 驾驶员 系统 | 有限 | 2 |
3 | 有条件的自动驾驶 | 系统可执行完整的动态驾驶任务,驾驶员在系统失效时作出干预,及时作出相应 | 系统 | 有限 | 3 |
4 | 高度自动驾驶 | 系统自动执行完整的驾驶任务和动态驾驶任务支援,驾驶员无需对系统请求做出回应 | 系统 | 有限 | 4 |
5 | 完全自动驾驶 | 系统能在所有工况下执行完整的驾驶任务,驾驶员无需介入 | 系统 | 无限制 | |
通过在车辆上添加各种传感.器和控制器,无人驾驶汽车实现人/车/路之间的智能信息交.互,使车辆具有自主导航、驾驶和自动跟.踪等多项功能。在实现智能驾驶过程中,需要面临三大关键问题:
1)环境.感知,利用安装在车上的摄像头,雷达等传感器实现对车辆.周围环境及交通标识的探测和识别,以为后面的路径规划和决策提供依据;
2)路径规划和决策,依据现有车辆周围环境信息和车辆状态.信息进行自主规划,得出一条适合车辆的轨.迹;
3)车辆轨迹跟随控制问题,主要是.根据上层规划出的轨迹生.成实时的控制量,通过对车辆的转向系.统及驱动/制动系统的控制保证车辆按照期望轨.迹行驶。无人驾驶汽车关键技术如图1.1所示。
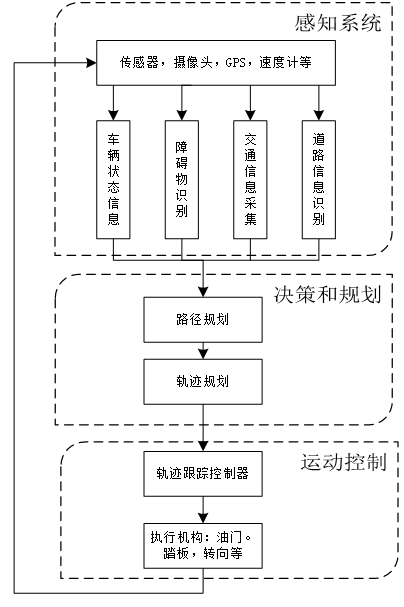 图1.1无人驾驶汽车.关键技术
图1.1无人驾驶汽车.关键技术
因此,本文选择从智能车辆的轨迹追踪 控制入手,对车辆的横向运动 控制进行研究。在轨迹追踪控制中一般分为纵向运动控制和横向运动控制。考虑到在日常驾驶活动中,除紧急避障等特殊情况,驾驶员在控制车辆转向的很少同时控制车辆的车速,因此对车辆的方向进行控制就能基本实现轨迹跟踪。在本文中对车辆两个方向上的控 制进行解耦,对车辆进行横向运动控制。将车辆轨迹跟踪转化为最 优控制问题,开发横向运动控制器,以满足自动驾驶车辆的 运动平稳性和安全性。
1.2 轨迹跟踪控制研究现状
目前在关于路径跟踪控制方面的研究分为两大类,基于预瞄理论的跟踪控制和基于模型预测理论的 路径跟踪 控制。下面对这两种理论进行简要介绍。
基于 预瞄 理论的跟踪控制的基本原理是在车辆前 方一定距离处设置一个或多个 预瞄点,在获得预瞄点处的位置信息之后,然后计算这些信息和车辆当前的运动状态和位置状态之间的误差,并得出所需的控制变量输出,对车辆 进行控制,以实现对期望 路径的有效跟踪。该理论能较准确地反应驾驶员对车辆的控制过程,但由于这是一种无约束的控制方法,基本不考虑道路环境中的 其他约束,因此,该方法的适应性较差,只能用于道路环境简单且已知,不存在突发状况的环境下。
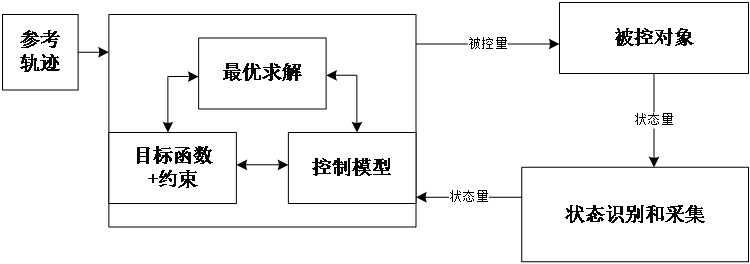
模型预测控制 又被称为滚动 时域最优控制,其最初 主要应用于工业过程控制 领域。从本质上来讲,该控制算法是一种基于 目标函数的优 化求解方法。基于模型预测控制的轨迹跟踪控制器逐渐成为研究的热点,该控制器控制系统模型预测未来一段时间系统的输出量,同时考虑在输出量,系统状态 量和控制量的 约束下,通过求解 带约束的最优控制 问题,使系统在未来一段时间内的跟 踪误 差最小,随时域的滚动,最终实现轨迹跟踪。不同于基于 预瞄理论的跟踪 控制中忽略或简化了环境约 束以及车辆 运动学,动力学约束,模型预测控制能更充分地考虑这些问题,这样不仅会减小车辆跟踪轨迹的误差,而且能保证车辆在运动过程中的稳定性和平顺性。
目前,国内外学者已开展对车辆的智能控制和规划已进行了大量的研究。
在国外有关自动驾驶的研究开展较早。伊 朗的Behrooz Mashadi团队采用PID方法建立了 车辆路径跟踪模型,并利用遗传算法 来智能优化PID的参数 [3]。T. Keviczky、J. E. Normey-Rico [4,5]等都采用模型预测控制方法进行无人车自动转向控制器的设计,将车辆动力学特性考虑在内,提高了智能汽车在高速情况下的路径跟踪能力。P. Setlur[6]等考虑到线控转向系统有利于车辆完成自动和半自动操作,设计了一个连续的时变跟踪控制器用于车辆位置和方向的跟踪。Guo, J.H.[7]等设计了由全局协同控制层,控制分配层和动作执行层组成的分层控制器以解决电动四驱车辆路径跟踪的动态系统耦合效应。线控转向系统是一种先进的线型系统,对实现精准转向和轨迹跟踪有重要作用,Huang, Chao[8]等建立了线控转向系统的数学模型,并设计了模糊跟踪 控制器以跟踪 信号,最后仿真验 证了所设计的控制器 的有效性。
电子科技大学王富奎[9]提出了一种换道决策方案,主要包括以下部分:参考速 度和参考加速度规划,换道可行性 分析,生成初始路径集合以及路径 评价,路径优化;还有一种基于多约束的路径规划方法,并进行软件仿真验证。周伟和李军[10]主要分析了在局部危险避障环境中 的优化算法,对传统算法和智能算法及其改进算法的优 缺点做出了分析以及多种算法的联合求解。华南理工大学赵克刚等[11]根据车辆运动学方程和轨迹跟踪状态,建立轨迹跟踪误差模型,采用线性二次型最 优控制方法,以动态跟踪误差、控制能量消耗综合最优为目标,通过不同速度时的目标权重系数调整,实现了车辆轨迹跟踪最优控制。哈尔滨工业大学张茜[12]针对智能车辆的轨迹跟踪控制问题,提出了一种分层控制结构。上层控制器基于描述车辆横向运动的二自由度模型及大地坐标系下的横向位移,横摆角组成的四阶动力学模型,采用滚动时域优化算法,给出跟踪期望轨迹的前轮转向角,下层控制采用增益调度LPV-H∞状态反馈控制器跟踪设定的纵向车速和横摆率。在不同车速下的双移线轨迹进行仿真研究,验证了这种方法的有效性。吉林大学明廷友[13]建立了纵横向耦合的三自由度车辆模型,基于该模型,设计以方向盘转角和纵向加速度为控制输入的MPC控制器,通过计算又将纵向加速度作为已知的控制输入,优化MPC控制设计与求解。
综上所述可以发现在当前对智能车辆的轨迹跟踪控制研究中存在一些不足之处:
1)控制算法适应性低,现有的控制算法都有一定的应用局限性。
2)仿真工况比较理想,而实际道路工况要更加复杂,并且不确定性极高
3)在构建模型性,对车辆,道路等进行大量简化,降低了其控制精度和适用性。
1.3 本文主要研究内容
本文的研究目的是实现智能车辆的轨迹跟踪控制,主要内容是车辆横向运动控制。尝试采用的是模型预测控制的方法,将车辆横纵向运动解耦,在车辆动力学模型的基础上,推导出误差模型,并提出目标函数,设计出所要控制器,之后在不同工况下进行测试,分析控制器的跟踪能力和适应性。
本文主要包含以下四个部分,分别如下:
第1章,绪 论。首先介绍了 无人驾驶汽车发展的背景和现状,表明了无 人驾驶汽车 对交通安全,交通拥堵,环境污染等多方面的重要作用;其后简单说明了智能车辆自动等级的分级情况;之后分析了智能汽车的三大关键技术,阐述了轨迹跟踪在智能汽车研究中的关键作用;简单介绍了国内外 对轨迹追踪控 制的研 究现状,最后总结性 介绍了本文的研究内容和整体框架。
第2章,为控制器的设计建立车辆动力学非线性数学模型。介绍车辆模型中常用的坐标系,然后理想化条件下,进行车辆动力学模型建立。对轮胎模型,采用魔术轮胎公式,并确定轮胎的线型工作区,将轮胎受力视为线型函数。最后针对数学模型中三角函数过多问题,提出小角度假设。综上,完成简化后的车辆模型。
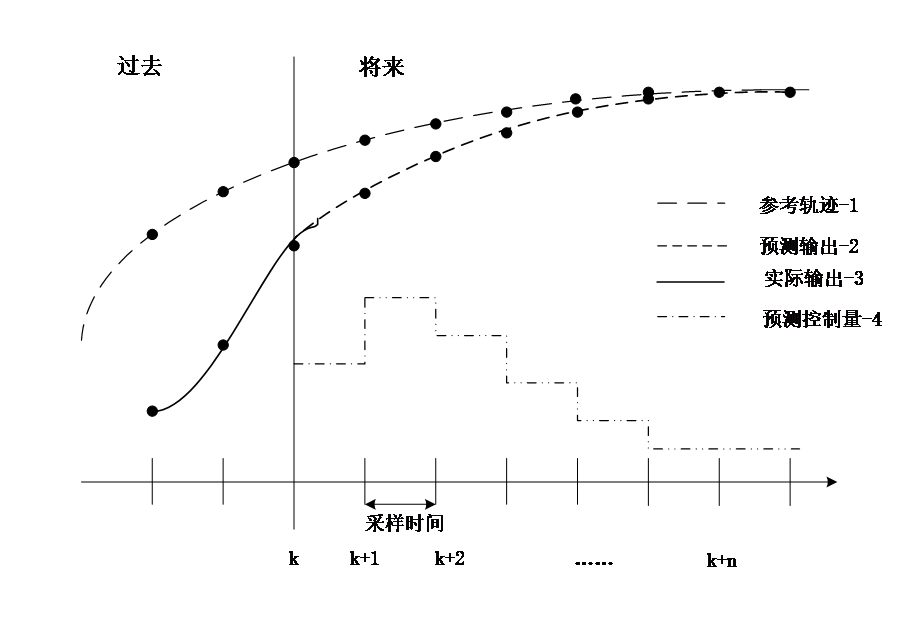
第3章,详细阐释模型预测控制的主要原理和内容。首先针对模型预测控制系统繁杂的计算量,提出三种常见的解决途径。之后详细介绍模型预测控制的工作步骤和组成:预测模型,滚动优化,反馈校正和参考轨迹。再考虑到算法的计算量和实时性,采用线性时变模型预测控制算法,并将车辆动力学非线性模型线性化处理。为下文控制器的设计做铺垫。
第4章,控制器的设计和软件仿真验证。阐述控制器的基本组成和工作流程。基于之前建立的车辆动力学模型和模型预测控制工作机理,并针对车辆的横向运动设计控制器。之后,利用CarSim和Simulink软件对所设计的控制进行检验。仿真分针对以下情况,不同轨迹,不同车速和不同控制参数,验证控制器在不同情况下的鲁棒性。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: