基于平面拟合的智能车辆三维激光点云地面分割方法研究毕业论文
2020-02-18 10:39:01
摘 要
智能车辆作为汽车行业 “轻量化、电动化、智能化、网联化、共享化”发展趋势之一不断受到了人们的关注。三维激光雷达以其实时性、精确性、抗干扰性等特点被广泛应用到智能车辆的环境感知系统中。激光雷达扫描得到的地面障碍物数据中存在着大量的地面点云数据,要实现对这些障碍物精确的感知必须首先将这些地面点云从雷达数据中精确地分割出来。本文针对智能车辆三维激光雷达点云地面分割这一方向内容进行了探索与研究。
针对现有地面分割方法复杂度高、可靠性低等问题,本文对基于平面拟合的智能车辆三维激光雷达点云地面分割算法进行了改进。首先对激光雷达原始点云数据进行坐标系转换,通过粒子群优化(PSO)方法和路径直线拟合方法对激光雷达进行标定与坐标系统一,并使用基于IMU(惯性测量单元)的方法对车辆位姿变换引起的畸变点云进行修正;然后对无序点云进行栅格化处理,通过栅格内最高点与最低点的高度差判断栅格完成地面初次分割,在栅格化的基础上使用基于点云疏密程度的地面分块方法将每一帧点云划分为局部块,并对每一分块进行RANSAC降噪处理与最小二乘平面拟合,判断点云到拟合平面距离完成地面点云二次分割,最终完成本文需要进行的智能车辆三维激光雷达点云地面分割的需求。
使用智能车辆平台和机器人操作系统(ROS)框架完成了地面分割算法的编写,通过定性与定量分析在校园园区环境和城市道路环境进行了算法实验验证。实验结果表明本文算法具有较高的可靠性与较低的复杂度,满足智能车辆行驶时对于数据处理所需要的精确度与可靠性要求。
关键词:智能车辆;激光雷达;地面分割;平面拟合
Abstract
As one of the development trends of “lightweight, electric, intelligent, networked, shared”, intelligent vehicles have received increasing attention. Due to 3D-LIDAR’s characteristics of real-time, accuracy and anti-interference, it is widely used in the environment awareness system of intelligent vehicles. There is a large amount of ground point cloud data in the ground obstacle data obtained by LIDAR-scanning. To achieve accurate perception of these obstacles, these ground point clouds must be accurately segmented from the radar data. This paper explores and studies the methods of the ground segmentation of intelligent vehicle’s 3D-LIDAR point cloud.
Aiming at the problems of high complexity and low reliability of the existing ground segmentation method, this paper improves the point cloud ground segmentation algorithm of intelligent vehicle based on plane fitting. Firstly, the coordinate system conversion of the original point cloud data of the laser radar is carried out. The LIDAR is calibrated by the particle swarm optimization (PSO) method and the path straight line fitting method, then the coordinate system of each LIDAR is converted to the same, and correct the distortion point cloud caused by vehicle pose change using IMU (Inertial Measurement Unit); For the convenience of calculation, the unordered point cloud is rasterized into grids, and the first division of the ground is completed by the height difference between the highest point and the lowest point in the grid. Each point cloud is divided into different blocks based on the density of point clouds, each block’s noise is reduced by RANSAC and least squares plane fitting methods. The distance from the point cloud to the fitting plane is calculated for completing the secondary segmentation of the ground point clouds. Through the two step of ground segmentations, the need for the ground segmentation of intelligent vehicle’s 3D-LIDAR point cloud is completed.
The ground segmentation algorithm was written using the intelligent vehicle platform and the robot operating system (ROS) framework. The experimental experiments were carried out in the campus environment and urban road environment through qualitative and quantitative analysis. The experimental results show that the algorithm has higher reliability and lower complexity, and meets the accuracy and reliability requirements for data processing on intelligent vehicles.
Key Words:Intelligent vehicle; LIDAR; Ground segmentation; Plane fitting
目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1 选题背景及研究意义 1
1.1.1 课题研究来源 1
1.1.2 课题研究目的 2
1.1.3 课题研究意义 2
1.2 国内外的研究现状分析 3
1.2.1 国外研究状况分析 3
1.2.2 国内研究状况分析 3
1.2.3 国内外现状总结 4
1.3 主要研究内容及流程 4
1.3.1 主要研究内容 4
1.3.2 研究方法 4
1.3.3 论文算法流程 5
1.4 本章小结 6
第2章 系统设备介绍 7
2.1 硬件设备 7
2.2 软件框架(ROS)简介 9
2.3 本章小结 11
第3章 原始点云获取与修正 12
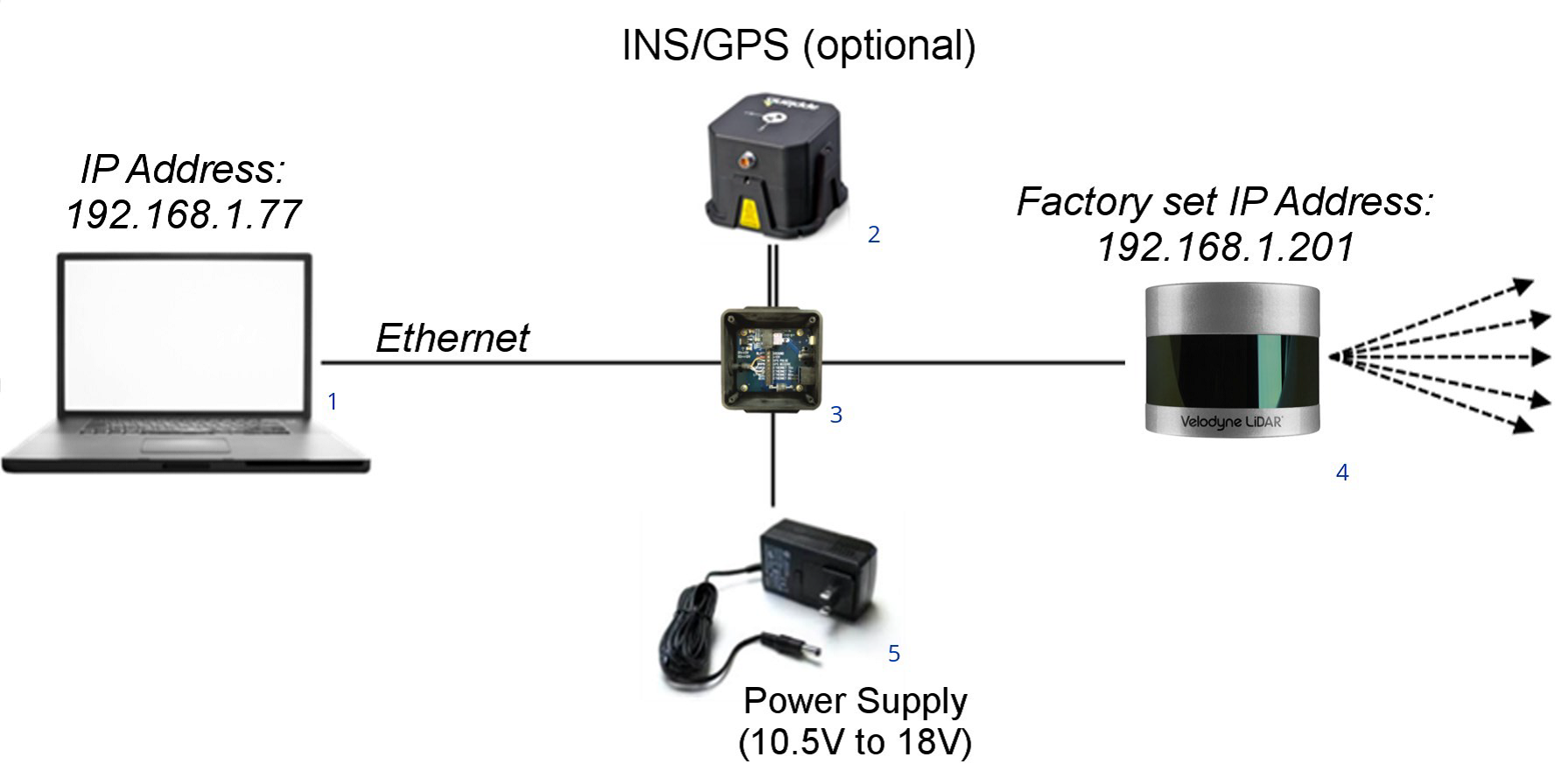
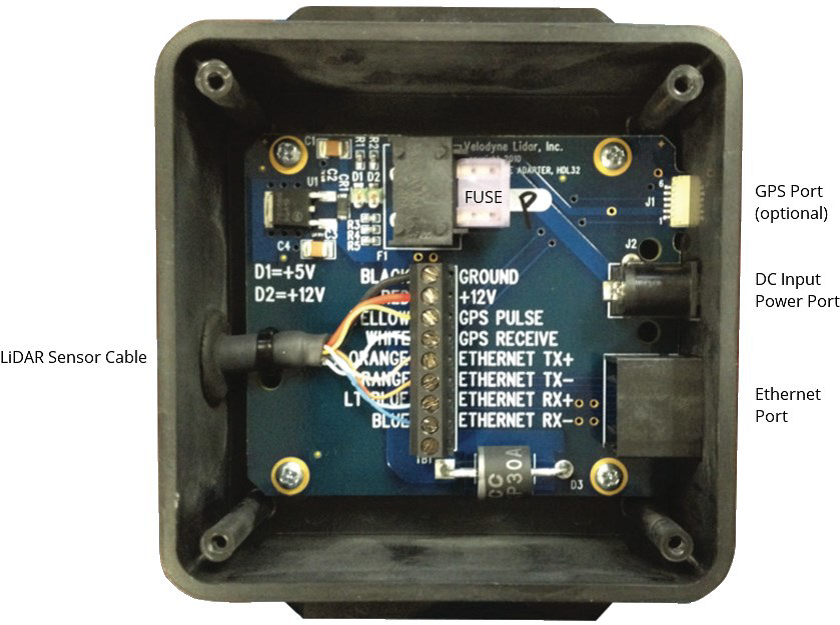
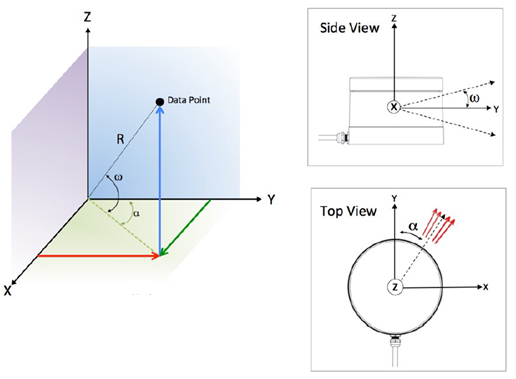
3.1 原始点云数据获取 12
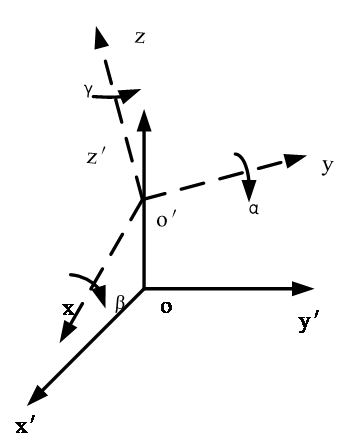
3.2 坐标轴转换与标定 13
3.3 点云坐标修正 15
3.4 本章小结 16
第4章 地面点云分割 17
4.1 点云栅格化处理 17
4.2 高度差初次分割 19
4.3 地面点云分块分割 22
4.3.1 疏密分块策略 22
4.3.2 RANSAC降噪处理 24
4.3.3 最小二乘拟合地面平面 26
4.4 本章小结 27
第5章 实验验证 29
5.1 校园园区环境场景 29
5.2 城市道路环境场景 32
5.3 定量分析 35
5.4 本章小结 36
第6章 总结与展望 37
6.1 文章总结 37
6.2 研究展望 37
参考文献 39
致谢 41
绪论
选题背景及研究意义
课题研究来源
智能车辆技术作为人工智能应用领域重要一部分,近几年来不仅在汽车学术研究领域和汽车市场产生了重要影响,我国政府也逐渐将其作为国家科技战略的一部分。2018年1月中国国家发改委在《智能汽车创新发展战略》中表示到2020年我国智能汽车新车占比需要达到50%,中高级别智能汽车需要实现市场化应用,重点区域示范运行需要取得成效。根据这一战略计划,2018年上半年,北京、上海、长沙等城市陆续发布了与智能汽车相关的测试文件,并于2018下半年逐步开放了国内智能系统测试区。
根据美国国家公路交通安全管理局调查统计,目前约94%的交通事故均是由驾驶人员分心驾驶,疲劳驾驶和不良情绪驾驶等个人因素引起的,而智能车辆可以在一定程度上替代驾驶人员的操作,因此其发展有利于减少驾驶人员不良操作引起的交通事故。与此同时,智能车辆技术的发展对于有助于提高车辆响应速度、优化车辆控制、提高车辆前瞻性,因此对于减少燃油消耗、降低污染、减少车辆碰撞和及时反馈道路信息都有着重要作用[1]。总而言之,智能车辆技术不仅有利于减少交通事故等突发情况,还有有利于增加道路交通流量。
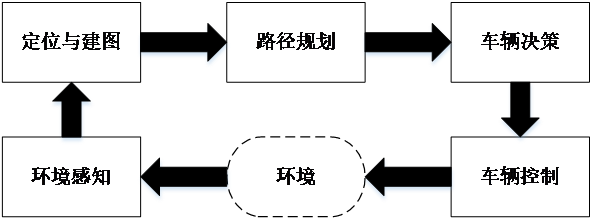
图1.1 智能车辆组成框架
如图1.1所示,智能车辆技术由5个主要部分组成,分别为车辆感知,车辆定位与建图,路径规划,决策以及车辆控制。车辆感知的任务为使用传感器对车辆周围环境进行连续扫描和监控,使得车辆能够像人类视觉一样获得行驶环境中的各种障碍物信息[2]~[6];车辆定位与建图主要任务在于确定车辆的全局和局部位置,并根据传感器数据获得车辆位置对应的环境;路径规划主要用于确定车辆可以安全行驶的路线;车辆决策根据可以行驶的路径,并依据车辆状态和环境信息计算最佳行驶路线;车辆控制模块负责操控车辆的行驶速度方向等车辆状态,使得车辆能够遵循决策获得的最佳路线进行行驶。
智能车辆环境感知使用的传感器主要有摄像头、毫米波雷达、激光雷达、超声波传感器等。其中三维激光雷达具有实时性好,精确度高,光照影响小等特点被广泛应用到智能车辆的环境感知系统中。通过三维激光雷达扫描获得的环境数据中会包含许多地面点,然而这些点不仅会增加环境感知数据的大小,还会影响到障碍物分类,识别和跟踪等后续工作的效果,因此必须将三维激光雷达点云数据中的地面点与非地面点进行区分出来[7]。
总而言之,三维激光雷达点云地面分割是智能车辆环境感知任务中重要预处理步骤。因此,本文以智能车辆为研究背景,重点研究了智能车辆三维激光点云地面分割方法,并依据现有方法和相关理论基础,对基于平面拟合的地面分割方法进行了改进。
课题研究目的
智能车辆经过多年的发展,已经取得了较大的成绩。然而,地面分割作为智能车辆进激光雷达数据进行处理时的第一项基础工作经常被人们忽视。虽然部分研究人员对激光雷达的地面方法进行了相关研究,但这些算法有时仍不能满足实时性与精确性要求,且部分算法需要在一定的环境下实现,拥有较差的适应性。
因此,从平面拟合的方法出发,对智能车辆三维激光点云地面分割方法进行研究分析,对基于平面拟合新的地面分割方法进行改进来满足智能车辆地面分割时的精确性、鲁棒性和实时性就是本课题要达到的目的。
同时针对本科毕业设计论文的要求,本次论文主要完成成了以下目标:
- 系统地介绍了地面分割的相关理论与方法;
- 基于C 编制出一套适用于ROS系统的地面分割算法;
- 对所编算法进行了实验验证分析;
- 在研究与实验阶段对智能车辆地面分割方面的相关理论和方法进行了补充。
课题研究意义
从实际意义方面来看,本文使用了主要使用了平面拟合的方法,该方法有助于提高地面分割的实时性与精确性[9]~[13],从而有助于提高障碍物分割、识别的精度,对于智能车辆实现车辆安全导航拥有积极作用。对于使用者而言,合适的地面的分割方法,对保障其行驶时的安全具有重要意义;对于企业而言,使用精确而又实时的地面分割方法,有助于其智能汽车系统的完善。
从理论意义方面来看,该地面分割的方法有利于完善智能车辆激光雷达点云地面分割方面的相关理论与技术方法,为以后的研究提供一定的参考建议。
国内外的研究现状分析
现有的地面点云分割方法主要有基于3D点云投影的方法[14]~[19]、基于函数模型的方法[20]~[23]、基于扫描线的方法[24]~[25]、基于图的方法[7],[26]~[27],国内外研究人员针对这几种主要方法和其他方法均进行了相关的研究。
国外研究状况分析
Moosman等[6]使用基于局部凸度测量的统一标准对3D激光雷达扫描中的地面和物体进行分割,实验结果表明,即使在非平坦的城市环境中该方法也能取得良好的效果,但是计算量较大;Biosca等[17]使用了一种基于模糊方法的无监督鲁棒聚类方法,该算法被证明是一种不需要初始化的鲁棒分割方法。即使在不同情况下存在高水平的噪音和失误,它也能够提取近平面表面,但这种方法不能分割出所有类型的对象;M.Himmelsbach等[18]使用一种快速的远程3D点云分割算法,该算法的核心是将二维线提取的算法应用于无组织三维点的区域,快速估计局部地平面,然后将单个点与所获得的平面线进行比较然后允许地面与非地面点的可靠分离,但该算法对于起伏路面分割效果不理想;Habermann D等[8]针对地面分割,指出了4种方法,分别为高斯过程回归(GP回归)、增量样本回归(INSAC)、圆形网格线段分割以及基于体素网格的GP-INSAC分割,这四种方法的拥有较好的分割结果,但实时性不一,出现悬挂点等噪点时处理效果较差。
国内研究状况分析
孙朋朋等[14]使用了一种采用延伸顶点的地面点云实时提取算法,该算法首先依据车辆姿态对激光雷达点云进行修正,然后使用建立柱状极坐标网格地图的方法提取出了每个网格中障碍物的延伸顶点,最终利用地面平滑一致性原理提取出所有的地面点,但该算法存在大量阈值的选定过程,阈值的错误选择会导致部分起伏路面的地面错误划分;张名芳等[20]在不同地面高度假设条件下,采用了多标签的马尔科夫随机场理论(MRF)构建极坐标网格地图,然后采用了环状置信传播(LBP)算法更新了局部地面高度概率,但是对于大规模的三维激光雷达点云该方法计算量较大;周等[24]利用激光雷达扫描线的固有排序,使用了一种快速准确的分割方法,它主要解决了以前分割算法不能解决的斜坡和颠簸路面的地面的分割问题,算法具有较高的分割精度,主要局限性在于阈值的选取,需要进行不断实验调整获得相应的阈值;赵凯等[26]使用了一种基于均值高程图的地面分割算法,该算法首先确定点云中最大平面为最大连通域并将其作为参考地面平面,然后通过判断其他连通域平面和参考地面平面的高度值做比较重新划分归类,最后通过校正梯度计算过程中产生的方法误差了完善地面点和非地面点的划分,该分割方法有较高的准确性和鲁棒性,但若出现均值高程图不准确的情况下,会对结果产生较大的影响。
国内外现状总结
总而言之,基于3D点云投影的方法有处理效率高的优点,但是无法处理具有悬挂障碍物的场景;基于函数模型的方法思想简单易于实现,但为获得较高算法精度,需要增加函数迭代次数,实时性较差;基于扫描线的方法充分利用了激光雷达的特性(近邻点之间相关性),具有较高的分割精度,但是不能处理大量的无序点云数据;基于图的方法对于图的依赖较大,计算量较小但精确度较低。
主要研究内容及流程
依据本文完成的任务与工作,本文主要完成了基于智能车辆的激光点云地面分割的相关算法并通过实验对本文的算法进行了验证。
主要研究内容
本文的主要内容一共分为6个章节,分别为:
第1章,对研究课题的来源、选题背景及目的进行相关介绍,主要包括选题背景及研究意义、国内外研究现状、主要技术方法和路线等方面的介绍;
第2章,对相关系统设备进行介绍,对论文中使用到的硬件设备的介绍和软件框架进行介绍;
第3章,对激光原始点云获取与修正部分进行介绍,大体包括原始点云数据获取方法的介绍、坐标轴转换方法介绍与标定以及点云坐标修正方法简介;
第4章,对文章使用的地面点云分割方法进行详细介绍,主要包括点云栅格化处理方法介绍、点云高度差初次分割介绍、点云分块分割的具体方法介绍
第5章,对算法进行实验验证,预计分为校园园区环境以及城市道路环境的定性分析和定量分析;
第6章,进行全文总结,对智能车辆激光雷达点云地面处理部分技术的研究工作进行展望。
研究方法
依据本文研究内容,最终选取了为文献研究法与实验法相结合的方法。具体来说,将采用如下方法:
- 采用文献研究法进行PSO、RANSAC以及最小二乘法等算法的理论研究;
- 采用探索性研究法进行相关算法实现部分的研究;
- 采用实验法来验证本文算法的可靠性;
- 采用定性与定量分析法对实验进行分析。
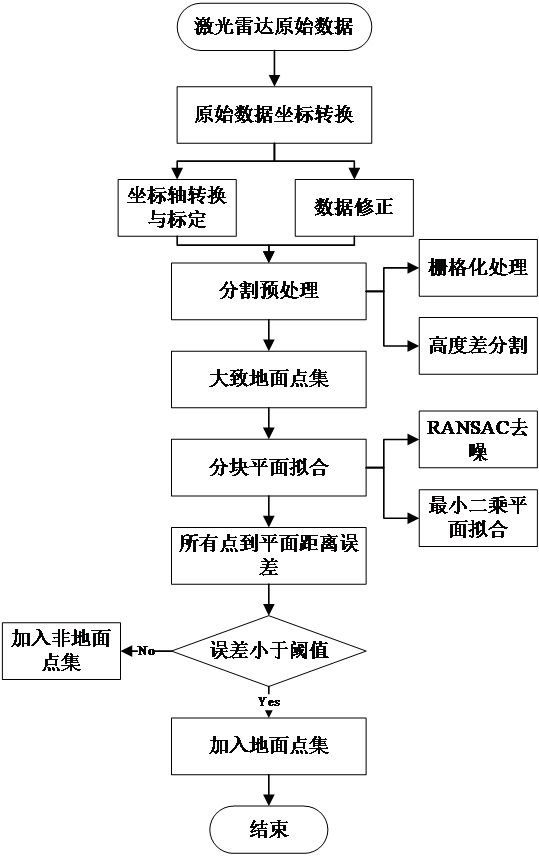
图1.2 算法流程
论文算法流程
根据本文主要研究内容以及主要研究方法,本文的主要流程如上图1.2所示。
本章小结
通过对智能车辆以及激光雷达点云地面分割课题来源的了解回顾,本文了解到点云地面分割工作是智能车辆三维激光点云处理部分的重要组成部分,对提高障碍物分割、识别的精度具有重要作用,本文选题具有有力的理论与实际背景支持,这也从侧面说明了本文的研究具有一定的实际意义与理论意义。通过相关文献回顾,现有的地面点云分割方法主要有基于3D点云投影的方法、基于函数模型的方法、基于扫描线的方法、基于图的方法,这些方法或多或少有一定的不足或缺陷。为了弥补现有方法复杂度过高以及可靠性较低的相关不足,本文根据上述回顾与现状分析,为得到较好的地面分割结果,本文采用了对修正后点云进行栅格化处理和分块平面拟合实现的方法,最终确定了主要研究内容与流程,下文将根据确定的课题研究目的与研究内容进行具体详细的介绍与分析。
系统设备介绍
本文主要依赖实验室提供的硬件平台与相关的软件平台进行相关的研究与实验操作,并通过这些设备获得相应的研究与实验成果。
硬件设备
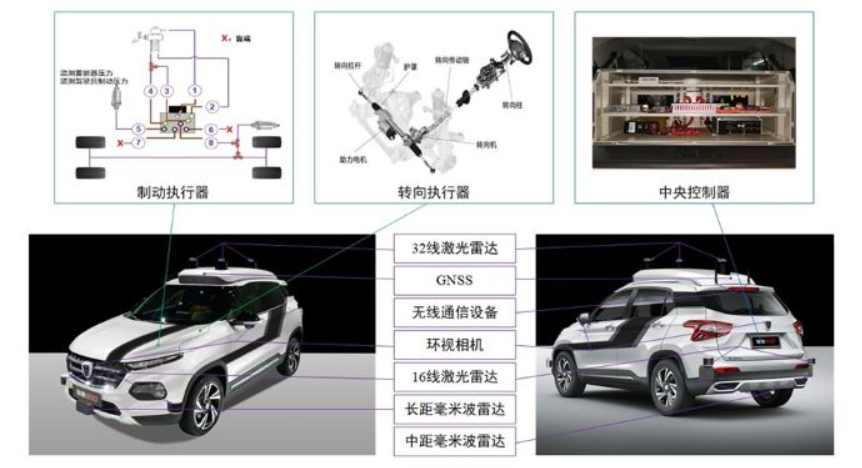
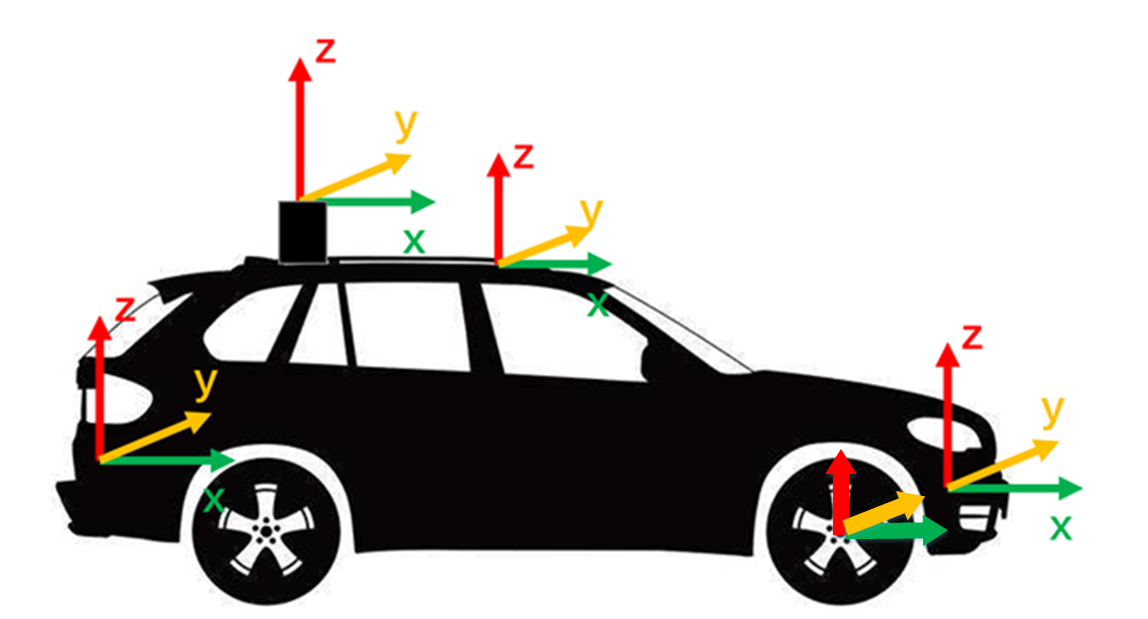
如图2.1所示,本文研究的硬件设施主要为基于“宝骏510”汽车进行改造的自动驾驶车辆平台系统,该系统可为自动驾驶感知、决策、控制等方面提供一定的实验条件。该系统主要包括感知设备传感器、制动执行器、转向执行器以及中央控制器等设备。感知设备主要包括6个3D激光雷达(车上方左部未安装)、3个毫米波雷达、3个摄像头,同时还具备惯导惯性单元、通信单元和GNSS导航单元。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: