无人驾驶车辆电动直线执行机构设计毕业论文
2020-04-12 15:58:24
摘 要
无人驾驶车辆是一种自主驾驶的智能型车辆, 通过一系列的车载传感系统自动感知路面环境, 并且通过一系列算法自主规划行驶路线,让车辆行驶到预定的目标地方。电动执行器是一种机电一体化设备, 常用于自动化过程控制领域, 电动执行机构一般用电机进行驱动,经过阀门的控制和调节, 可接收调整设备发送模拟或数字标准信号, 通过将这些信号转变成相应的旋转或冲程,电动执行机构可以根据预定要求生产工艺, 是过程自动控制系统中最重要的执行设备, 广泛应用于电力、石油、化工、冶金等行业。采用无人值守电动直线驱动器输出直线位移, 控制油门、刹车, 转向无人驾驶车辆的正常运行, 而不是人工操作。无人驾驶车辆的电动直线执行机构就是控制车辆的转向、油门、离合、刹车等一些一系列需要直线位移输入的机构。本论文设计出一款电动直线执行机构,该机构可满足无人驾驶电动直线执行机构的直线位移输出的基本条件,通过设计机构的机械部分,选择相应型号的电机、单片机以及驱动器,让电机可以正常工作。
关键词:无人驾驶,电动直线执行机构,单片机
Abstract
Unmanned vehicle is a kind of autonomous driving intelligent vehicle, through a series of vehicle sensing system to automatically perceive the road environment, and through a series of algorithms to autonomously plan the driving route, so that the vehicle to travel to the intended target place. Electric actuator is an electromechanical integration equipment, often used in the field of automatic process control, electric actuators generally driven by motor, through the control and regulation of valves, can receive adjustment equipment to send analog or digital standard signals, by converting these signals to the corresponding rotation or stroke, The electric actuator can produce the process according to the predetermined request, is the most important execution equipment in the process automatic control system, is widely used in the electric power, petroleum, chemical industry, metallurgy and so on. Using unattended electric linear actuator output linear displacement, control throttle, brake, to the normal operation of unmanned vehicles, rather than manual operation. The electric linear actuator of unmanned vehicle is to control the steering, throttle, clutch and brake of the vehicle, and a series of mechanisms need linear displacement input. This thesis designs an electric linear actuator, which can satisfy the basic condition of the linear displacement output of the unmanned electric linear actuator, and through the mechanical part of the design mechanism, select the corresponding type of motor, MCU and drive, so that the motor can work normally.
Keywords: driverless car, electric operator, microcontroller
目录
第1章 绪论 1
1.1无人驾驶车辆的研究背景及意义 1
1.1.1 无人驾驶车辆国内外研究现状 1
1.2电动执行机构 2
1.2.1电动执行机构的概念、用途及分类 2
1.2.2电动执行机构国内外发展历程 2
第2章 电动直线执行机构结构设计与选型设计 4
2.1 执行机构设计 4
2.1.1 设计任务及要求 4
2.1.2 设计方案 4
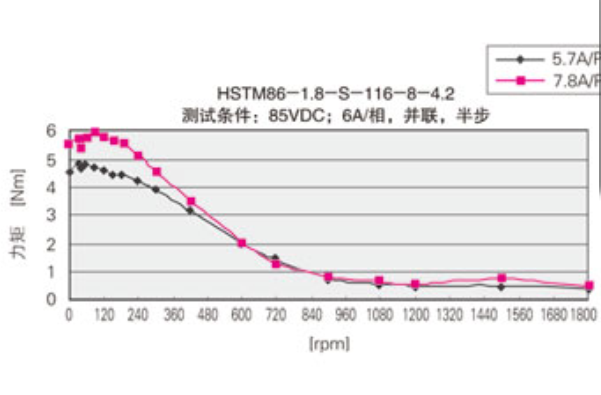
2.2步进电机选择 4
2.3连轴器选择 6
2.4轴承的选型 6
2.5滑动丝杆选择 6
2.6导轨和滑块选择 7
2.7本章小结 8
第3章 电动直线执行机构模型构建 10
3.1 丝杆建模 10
3.2 盖板建模 13
3.3 滑块的建模 17
3.4 导轨的建模 18
3.5 装配过程 19
3.6本章小结 24
第4章 执行机构控制系统硬件选型与软件设计 25
4.1 电机控制 25
4.2 控制系统硬件选型 25
4.2.1单片机选型 25
4.2.2驱动器选型 27
4.3 控制系统程序设计 27
4.4本章小结 30
第5章 总结和展望 31
5.1总结 31
5.2展望 31
参考文献 32
致谢 33
第1章 绪论
1.1无人驾驶车辆的研究背景及意义
第二十一世纪以来, 互联网为汽车工业的发展带来了变革的契机, 汽车智能化技术得到了广泛的应用, 使汽车的运行更加简单、安全,最典型和最流行的未来应用是无人驾驶车。无人驾驶, 指车辆装有智能软件和各种感测设备, 包括车载传感器、车载雷达、车载 GPS 和摄像机等, 实现车辆自动安全驾驶, 安全高效到达目的地和完全让交通事故消失。电动直线驱动器是无人驾驶车辆的重要组成部分, 是汽车外装自动驱动执行机构的执行单元。通过研究无人驾驶汽车的事故发生率, 虽然中国仅有不到3% 的世界车辆, 但交通事故的死亡占世界 16%, 每年有10万多人死于车轮下,我国的交通安全问题迫在眉睫, 无人技术是解决这一现象的好办法。
1.1.1 无人驾驶车辆国内外研究现状
自上世纪初以来, 一些发达国家,例如美国和德国都已经大量进行无人驾驶智能车辆的研究, 并且大量的人力、物力、资金都被投入进去, 取得了长足的进步,在这个领域也发展地非常迅速。这些国家在智能汽车领域处于领先地位, 并保持第一位。美国是第一个在无人驾驶车辆上发展并保持领先地位的国家。在美国, 早在二十世纪八十年代自主地面车辆 (ALV) 计划已经提出, 其设计是在八轮车, 完成在当地安全环境中低速自动驾驶。但由于一些技术上的限制, 到近第二十一世纪, 科学家和他们的团队在每个国家都试图简化这些问题, 把研究的重点从以前的八轮汽车转向民用辅助驾驶公路上的车辆。
因为我国汽车工业起步较晚, 导致在无人驾驶车研究中也比其他发达国家落后。从1980左右, 国防科大开始从事无人驾驶汽车领域的研究和开发。经过近10年的师生不懈努力, 终于在 1989年, 中国第一辆无人驾驶车被开发出来, 无人驾驶车的尺寸不是很大, 车身长度 1m, 宽 0.6m, 约重175公斤, 3 个车轮安装在车内。其中有一个车轮在前面, 两个车轮在后面, 前轮起到了指导作用, 两个后轮功能是推动汽车向前或向后。这辆无人驾驶车很小, 但自动转向、传感器、导航和巡航控制系统安装在这辆车上,以保持它自己行驶。在1992,国防科技大学在无人驾驶汽车理论的基础上进行了卓越的改进和创新,成功开发了无人驾驶汽车,这是中国第一个在实际意义上的无人驾驶车。与国外其他自驾车汽车不同, 汽车的主控制单元、自动控制系统和各种需要保持移动的传感器都没有安装在车内,相反,他们安装在另一辆车上,所以无人驾驶车可以由驾驶员操作。并可自动维护安装自动控制系统。在2000年6月,中国的第四代无人驾驶汽车是由国防科技大学研制成功的,以每小时76公里的最高时速,这是国内无人驾驶车辆的最高速度。
1.2电动执行机构
1.2.1电动执行机构的概念、用途及分类
电动执行器是一种机电一体化设备,常用于自动化过程控制领域,它是由电驱动, 通过阀门控制和调节, 并可接收调整设备发送模拟或数字标准信号,通过将这些信号转变成相应的旋转或冲程, 如机械位移来改变和操作阀门(控制阀、油门、挡板等), 使参数 (压力、流量、温度、液位等)可以自动调整。电动执行机构根据之前设定的一些参数进行自动化生产过程,所以可以称为自动化控制系统中最为重要的执行机构, 广泛应用于各种工业领域。
电动执行机构可以分为好几种,也有好几种分类方式,其中根据使用的周边环境,可以归结为普通型、核电型、防爆型和防腐型等;根据其输出运动状况又可分为大回转型(输出轴转角大于360°)、部分回转型(转角小于360°,多为90°)和直行程(输出轴直线运动);根据控制电动直线执行机构的方式也可分为开关型(开环控制)和调节型(闭环控制)。
1.2.2电动执行机构国内外发展历程
在1905年,世界上第一台电动直线执行机构,名为SIPOS,被德国的西门子公司制造出来,从此在自动化这一领域开始运用电动直线执行机构,而且随着科学技术水平不断地提高和自动化控制技术的一直进步完善。一开始的电动直线执行机构多以机械部件为主,包括好几个部件组成,其中有电机、机械传动装置位置传感器、转矩信号开关组成。
在上个世纪的70年至80年,由于计算机技术和大规模集成电路的提高,可编程序控制器(PLC)被创造出来,这一创造使得集中式和分散式相结合的分散型控制系统出现,由于以上装置的出现电动执行机构发展成了机电一体化的高端装置。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: