纯电动汽车双轴驱动系统匹配设计毕业论文
2020-02-19 20:29:23
摘 要
纯电动汽车除了满足动力性设计要求意外,还需要具有较好的续航能力。因为动力电池工艺技术的限制,目前单电机驱动的纯电动汽车电池储存的电能少,续航能力差。而采用基于工况匹配的双电机驱动系统,可以使整车行驶的经济性能得到进一步的提升。充分发挥双电机驱动系统的节能优势,这对于提高纯电动汽车的续驶里程和动力性能具有重大价值。本文的研究对象为某款纯电动汽车,开展分布式双电机驱动系统参数匹配设计。
首先,分析了多种电机布置形式的优缺点,从中选择双电机分布式作为双电机双轴驱动的方式。在分析了整车动力性能和经济性的基础上,完成了单电机驱动系统中驱动电机参数的匹配。考虑拟定的工况及需求负荷的频率,对双电机驱动系统中的两驱动电机参数进行合理的分配。根据汽车的动力性和续驶里程要求,匹配传动系统传动比和电池参数。
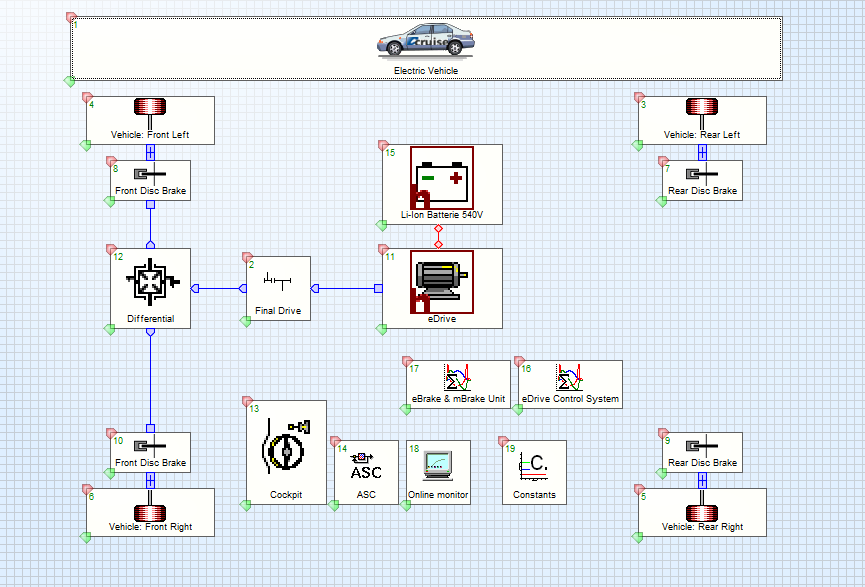
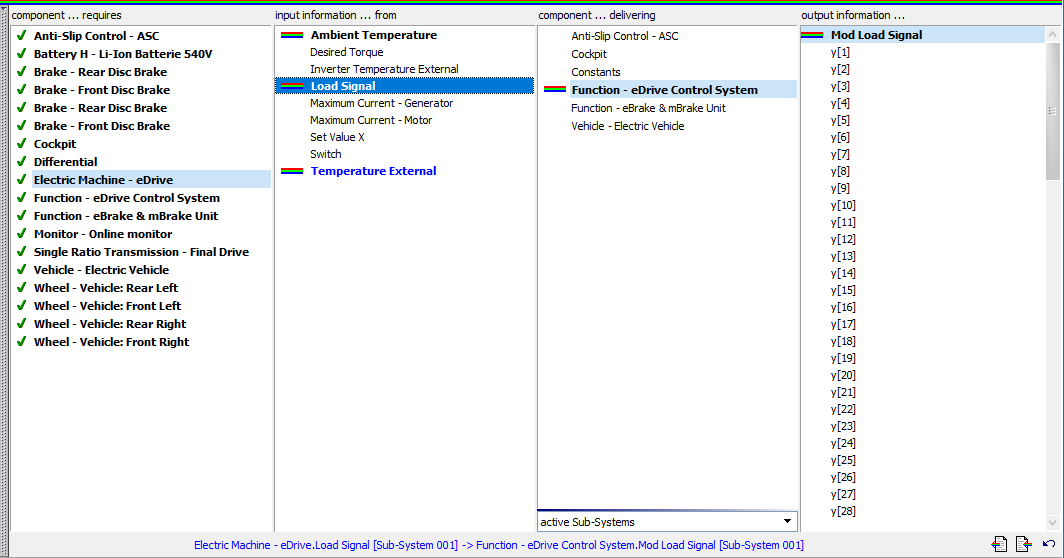
其次,利用AVL Cruise软件分别建立单电机驱动纯电动汽车模型和双电机双轴驱动纯电动汽车模型,设置测试整车动力性和经济性的任务,制定相应的简单的电机控制策略。
最后,对仿真结果进行分析,通过对比单电机与双电机的仿真结果可以得知,双电机驱动系统在百公里加速和最大爬坡度方面表现出一定的优势,采用双电机驱动系统的动力性优于单电机驱动系统。相比单电机驱动系统,双电机驱动系统的经济性能也有所提升。
关键词:纯电动汽车;双电机驱动系统;参数匹配;Cruise
Abstract
Pure electric vehicles need to have better endurance in addition to meeting the requirements of dynamic design. Due to the limitation of power battery technology, the single-motor driven pure electric vehicle has poor endurance. The dual-motor drive system based on the matching of working conditions can further improve the economic performance of the whole vehicle. Give full play to the energy-saving advantages of the dual-motor drive system, which is of great significance for improving the technical level of pure electric vehicles. This paper takes a certain automobile as the research object and carries out the matching design of the dual motor drive system.
Firstly, the advantages and disadvantages of various motor layouts are analyzed, and the dual-motor distributed is chosen as the dual-motor dual-axis drive. Based on the analysis of the vehicle's dynamic performance and economy, the matching of the drive motor parameters in the single-motor drive system was completed. Considering the proposed working conditions and the frequency of the demand load, the two drive motor parameters in the dual motor drive system are reasonably distributed. Match the drive train ratio and battery parameters according to the vehicle's power and driving range requirements.
Secondly, using AVL Cruise software to establish a single-motor-driven pure electric vehicle model and a dual-motor dual-axis drive pure electric vehicle model, set the task of testing the vehicle's power and economy, and develop a corresponding simple motor control strategy.
Finally, the simulation results are analyzed. It can be seen from the simulation results that the parameter matching results of the key components of the power system can meet the performance requirements of the vehicle. The power of the dual motor drive system is superior to that of the single motor drive system. The economic performance of the dual motor drive system is also improved compared to a single motor drive system.
Key Words:Electric vehicle; Dual motor drive system; Parameter matching; Cruise
目录
摘 要 II
Abstract III
第1章 绪论 1
1.1研究背景及意义 1
1.2纯电动汽车驱动系统比较分析 1
1.2.1单电机驱动纯电动汽车 1
1.2.2多动力源驱动纯电动汽车 2
1.3国内外电动汽车动力匹配研究现状 2
1.4本论文的研究内容及技术路线 4
第2章 纯电动汽车双电机双轴驱动系统总成参数匹配 5
2.1电动汽车基本参数和设计要求 5
2.2纯电动汽车动力传动系统参数匹配及选型 6
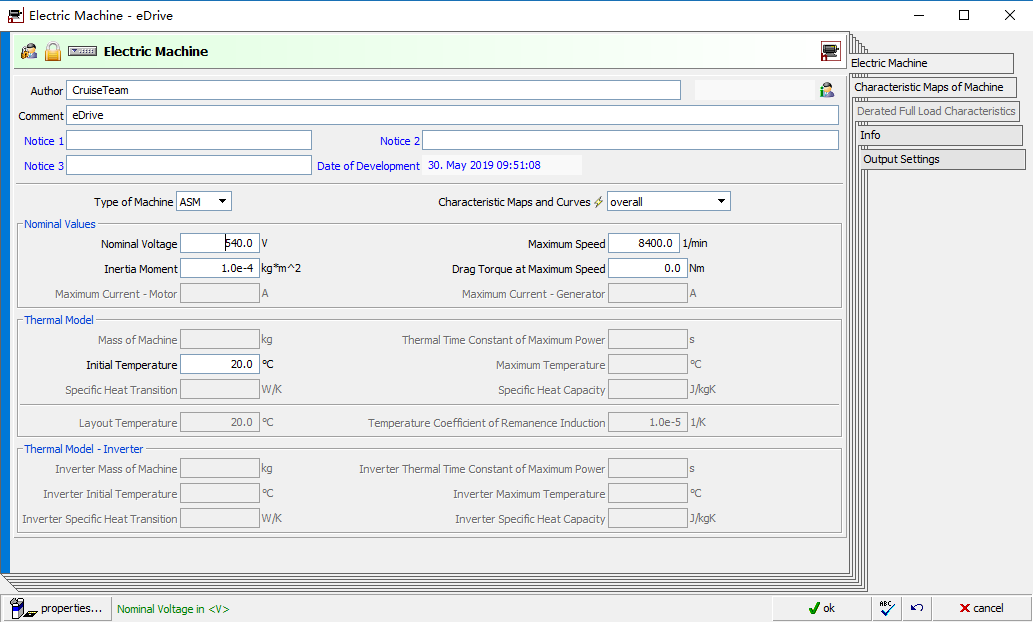
2.2.1电机参数匹配和类型选定 6
2.2电动汽车双轴驱动传动比参数匹配 10
2.3电池参数匹配及选型 11
2.3.1电池选型 11
2.3.2电池参数的选择 12
2.4本章小结 13
第3章 双轴驱动电动汽车整车建模仿真 14
3.1 AVL CRUISE软件 14
3.2纯电动汽车仿真模型的建立 14
3.2.1建立单电机整车模型 14
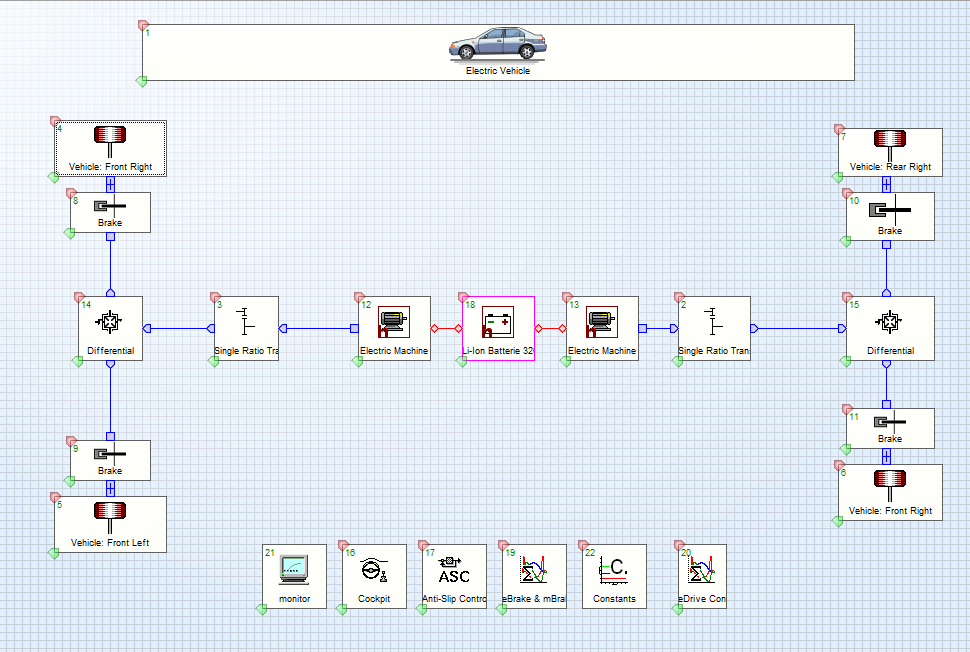
3.2.2建立双电机整车模型 16
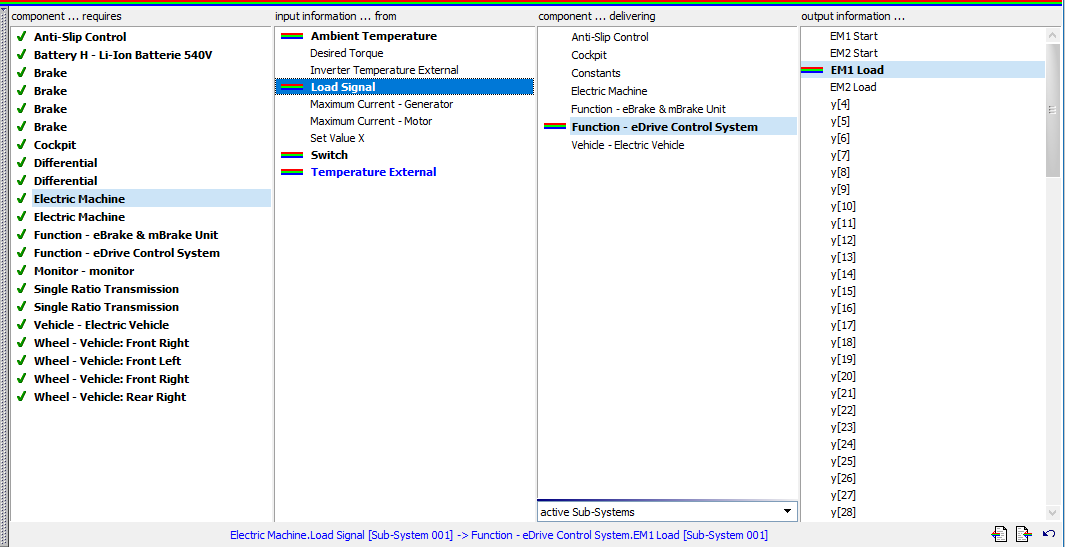
3.2.3 双电机驱动系统控制策略 18
第4章 仿真结果分析 20
4.1 动力性仿真结果分析 20
4.2经济性仿真结果分析 22
第5章 总结与展望 24
5.1总结 24
5.2展望 24
参考文献 25
致谢 26
第1章 绪论
1.1研究背景及意义
现在汽车在我们出行和生活中发挥着非常重要的作用,不但改变了我们的出行方式,也逐渐改变了人们周围的环境。随着汽车排放尾气对环境的污染以及汽车行业相关法规的出台,当今社会越来越多的人开始关注环保和能源方面的问题。同时近些年出现的雾霾污染问题,政府常对机动车尾号进行限行,而对电动汽车在市区行驶,不需要限制为好,这些措施有利于电动汽车在城市的普及。石油是不可再生的资源,大量的使用会导致能源危机问题。电动汽车相比传统燃油车辆,它在行驶的过程中用电机驱动而无需再用内燃机,所以不会产生污染气体和颗粒物的排放。此外电能可以通过其他形式的能量转换获得,减少了化石燃料的使用量,降低人类对化石燃料的依赖性,这样便解除石油资源日渐枯竭的问题。
电机技术经过多年的发展技术已经比较成熟,但是电池作为电动汽车的动力源,一直是限制电动汽车发展的关键因素。电动汽车在国家政策的扶持下,近年来得到了快速的发展。然而如今消费者对汽车动力性性能的需求不断增加,同时又需要保证比较好的经济性,传统单电机驱动纯电动汽车现在还存在续驶里程短、充电时间长、电池寿命短等问题难以得到广泛普及。因此,在目前电池和电机技术限制下,设计高效的的传动系统和合适的控制策略以增加纯电动汽车的续驶里程是发展电动汽车的方向。双轴驱动系统是一种具有高效节能潜力的结构,其合理的分配两个电机输出动力,使系统具有多动模式,根据不同的行驶工况,通过控制两个电机各自输出的转矩,满足驾驶员的动力需求,同时使两个电机工作在各自的高效区,提升整车的经济性能[1]。
1.2纯电动汽车驱动系统比较分析
1.2.1单电机驱动纯电动汽车
“电机 单档减速器”和“单电机 多档减速器” 单动力源驱动的纯电动汽车驱动系统主要采用的两种形式。因为这种电动汽车行驶过程中动力结构可靠,只需要控制一个电机的输出,所以不需要复杂的控制系统和控制策略,在目前生产的电动汽车得到了广泛的应用。但是这种驱动方式对电机的要求相对较高,电机要求具有宽速度变化范围、较大的峰值转矩。若选择峰值功率相对较小的电机,会使整车的动力性变差、续驶里程变短,电机长时间在接近峰值功率附近工作容易损坏电机。而若选用峰值功率相对较大的电机,电机的价格昂贵,整车造价提高,而且车辆正常行驶时电机经常在低负荷工况下工作,电机的效率较低。为了使纯电动车在行驶过程中满足动力性的要求下兼顾经济性能,降低对电动机的性能要求,部分电动汽车匹配多档变速器,通过多档变速器与电机的配合提升汽车动力性的同时延长续驶里程。但是增加变速箱会使传动系统变得复杂,增加了车辆的重量和制造成本,动力经过变速箱时有动力损失。所以档位多为2-3档。
1.2.2多动力源驱动纯电动汽车
为了解决单电机在驱动汽车行驶过程中存在的上述问题,近些年有人提出了使用多个小电机代替单个大电机的驱动系统。多动力源驱动纯电动汽车电机的驱动方式主要有多电机分布式驱动和多电机耦合驱动两种。
- 多电机耦合驱动的电机布置方式
耦合式驱动系统是利用相应的机械耦合机构,把多个电机产生的动力进行合成或分解,再传输到驱动轴上,目前耦合机构主要是行星齿轮机构。通过根据车况,切换带电机和辅助控制零件状态,各个电机输出对应的转速、转矩,以提高电机的负荷率,从而提高整车的经济性。
- 多电机分布式驱动的电机布置方式
此类布置方式是将电机分布到汽车的驱动轴或驱动轮,利用电机独立驱动车轮具有结构紧凑、驱动链短、效率高、空间利用率高的优点,通过合理分布各个电机输出的转矩,提高电机的负荷率从而提高整车的经济性[2]。目前提出的多电机独立驱动主要包括轮毂电机独立驱动、双轴独立驱动和轮边电机独立。
多电机驱动系统虽然能提高电机的负荷率和降低对驱动电机的要求,但是也有它自身的缺点。采用多电机驱动会增加减速器的结构复杂程度,增加零件数目,增加了汽车的设计制造成本。相对于单电机驱动,多电机驱动控制结构复杂,对电机控制具有比较高的要求,电机数目增多增大了发生故障的概率,系统工作的可靠性差。
1.3国内外电动汽车动力匹配研究现状
陶虹君[3]结合多种测试工况,统计分析单电机驱动电动汽车在工况循环中的常用车速、常用功率,并在此基础上匹配设计前后电机参数,以系统最优效率为目标,制定控制策略,并验证了与单电机驱动电动汽车对比,双电机驱动电动汽车在整车动力性和经济性方面的优越性。陈宗波[4]首先匹配了同款单电机驱动电动汽车,提出并匹配了双电机驱动系统,在Matlab/Simulink中建立整车模型和控制策略,最后对仿真结果进行对比分析,分析了影响双电机驱动电动汽车经济性的因素。庞滔[5]介绍了双电机耦合驱动系统模式识别、动力分配策略及为了提升系统工作的平顺性,提出了模式切换控制策略,最后对驱动系统参数优化及性能仿真。喻厚宇[6]提出了双电机双轴驱动系统在不同情况下采取的相应的驱动和控制策略,考虑了轮胎对汽车驱动的影响,由于前后由于某种原因使前后轮胎半径不等,造成前后轮行程不同,产生功率浪费,降低了整车的经济性。黄俊育[7]结合汽车的动力性要求,分别对电机、电池和传动系统进行参数匹配,在相关的循环工况下进行参数仿真,验证整车的结果是否满足设计要求,最后利用蚁群遗传法对匹配参数进一步的优化,达到或超过设定的预期经济性和动力性目标。牛秦玉等[8]以某款纯电动汽车为研究对象,采用非线性权重粒子群算法,以整车经济性为优化目标,动力性及各参数间耦合关系为约束条件,完成参数解耦并实现全局优化。优化后整车动力性基本不变,但经济性能改善效果显著,验证了设计的参数算法的优越性,使得整车动力系统设计参数更加优化。蒲晓珉等[9]和张珍等[10]对影响纯电动汽车设计时变速机构、电机、动力电池选型的各种因素进行了介绍,对具体的计算方法及公式中一些参数的选择技巧进行了说明。刘江红等[11]通过对匹配设计电动汽车动力传动比的理论分析计算,采用了两挡设计让驱动电机始终工作在高效区域,系统效率更高,最高车速、百公里加速时间、爬坡度等均有所提高。叶伟宏[12]和武小花等[13]研究了一种双电机行星耦合驱动系统的结构与工作原理,并制定了对应不同工作模式以及模式切换过程的控制策略。并进行了仿真验证。仿真结果表明,该双电机耦合驱动系统控制器能有效实现对双电机动力的控制,在满足驾驶员需求转矩的前提下,提高了系统的综合效率。梁昌杰[14]以某一电动汽车为例,分别从对电机参数、整车经济性的影响进行了两档和一档传动系统的对比分析得出电动汽车采用多档传动系统,在满足动力性要求的情况下,可以降低对驱动电机峰值转速和峰值转矩的要求,在电机匹配时选用成本和制造工艺相对低的电机。Jianjun Hu等[15]提出一种纯电动汽车双电机多模式动力总成系统,提出了一种参数匹配方法,该方法基于对驾驶循环所需功率的统计分析,并受动态性能的约束。它基于最佳效率提出了模式转换策略和功率分配策略。Jinglai Wu等[16]基于具有行星齿轮传动装置(DMPGT)的双电机,提供三种驱动模式。在三个典型驾驶循环中提出的两种动力系统的仿真结果表明,配备DMPGT和DMPAT的EV具有比配备单电机输入动力系统的EV更高的整体效率。Wenwei Wang等[17]分析了同轴串联双电机耦合推进系统的配置,得到了动态规划(DP)提取控制策略的电源管理策略的优化目标函数,动力总成的仿真模型在MATLAB中通过标准驾驶循环下的不同策略进行了测试,与传统的比例控制策略相比,从DP(基于DP的策略)中提取的控制策略将能量消耗降低了8.8%。
1.4本论文的研究内容及技术路线
本论文主要是设计开发一款城市代步电动汽车的动力系统,研究的主要内容包括对电池、电机、减速器等主要零部件的参数匹配设计,并在AVL cruise里对整车进行建模仿真分析。
- 文章首先介绍了国内外电动汽车的发展情况,根据电机的分布情况进行分类,分别叙述了各种驱动系统的优缺点。
- 根据整车的设计要求,结合仿真模拟的工况,对电池、电机、减速器等部件参数进行匹配计算。
- 基于AVL cruise仿真软件根据之前匹配的参数建立整车的仿真模型,设置模拟仿真的工况,制定相应的控制策略。
- 对双单机双轴驱动系统仿真结果结合单电机驱动电动汽车仿真结果进行动力性和经济性分析。
第2章 纯电动汽车双电机双轴驱动系统总成参数匹配
为了对双电机驱动和单电机驱动的动力性能和经济性进行对比和分析,本章先以单电机汽车传动系统为基础进行匹配。
2.1电动汽车基本参数和设计要求
电动汽车的整车参数与传统燃油车类似,主要包括整车装备质量、满载质量、空气阻力系数、轮胎动态滚动半径和迎风面积,在这些基本参数的基础上进行传动系统匹配设计。而设计要求主要是动力性要求和经济性要求,动力性一般表现为最大爬坡度、最高车速和0-100km/h的加速时间,经济性则通过百公里消耗电量或续驶里程来反映。
双电机双轴驱动电动汽车整车基本参数如表2.1所示,基本动力性指标如表2.2所示:
表2.1 车辆基本参数
参数 | 数值 | 单位 |
整备质量 | 1055 | kg |
满载质量 | 1400 | kg |
迎风面积 | 2.2 | m2 |
风阻系数 | 0.34 | / |
轴距 | 2550 | m |
轮胎规格 | 165/70R14 | / |
表2.2 车辆基本动力性指标
项目 | 指标 | 单位 | |
最高车速 | 最高车速 | 120 | km/h |
30分钟最高车速 | 100 | km/h | |
加速能力 | 0~50km/h加速时间 | lt;5 | s |
50~80km/h加速时间 | lt;8 | s | |
0~100km/h加速时间 | lt;15 | s | |
爬坡能力 | 最大爬坡坡度 | 30 | % |
最大爬坡坡度爬坡车速 | gt;15 | km/h | |
续航能力 | 续驶里程 | 300 | km |
2.2纯电动汽车动力传动系统参数匹配及选型
目前电动汽车电机取得了比较大的发展,但是电池技术还未取得突破性进展,还存在蓄电池的比能量、比功率不够大,造成续驶里程不够长,使用寿命短,成本高的问题。参数匹配的目的就是在目前电池储存能量的限制下,在满足动力性要求的前提下,尽可能的提高续驶里程。
2.2.1电机参数匹配和类型选定
2.2.1.1电机类型的选定
在纯电动车辆中,驱动电机可以产生机械能,通过电动汽车的驱动车轮推动汽车前进,所以说电动汽车的动力性能很大程度上取决于匹配的电机参数。电动汽车使用的电机要求与电动汽车的工况有关,因为电动汽车行驶过程中,速度变化范围广,启动时需求转矩大,所以需要电机启动转矩大、转速调整范围大效率高[18]。在选用纯电动车用驱动电机时需要满足以下几点:
- 响应快
- 可调节性好
- 过载能力强
与其他电机相比,永磁同步电机具有效率高、易控制、体积小、易冷却的优点,所以本次匹配设计选用永磁同步电机。
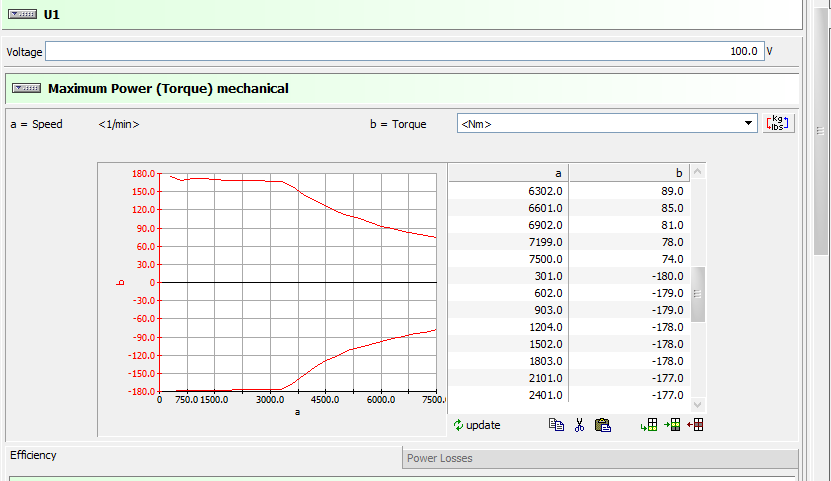
2.2.1.2电机峰值功率计算
选择电机功率时,应使其满足汽车的动力性指标包括最高车速、最大爬坡度和百公里加速时间。双电机汽车前后电机的峰值功率之和应大于或等于单电机的峰值功率。电动汽车电机功率的选择应满足最高车速、最大爬坡度和百公里加速时间的要求。
- 最高车速要求的整车需求总功率
车辆以最高车速行驶时,车辆牵引力和阻力之间相互平衡,本文所设定的最高车速为120km/h,在计算车辆最高车速的需求功率时,只需要考虑汽车受到的滚动阻力和空气阻力。
式中:表示传动效率,本文取0.9;m表示汽车的半载质量,1227kg;表示滚动阻力系数,取0.015;g表示重力加速度,取9.8N/kg;表示风阻系数,取0.34;表示最高车速,由设计要求取120km/h;A表示迎风面积,取2.2。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: