基于无速度传感器的异步电机控制策略仿真研究毕业论文
2020-02-18 10:49:53
摘 要
当前,新能源汽车技术发展迅速,是我国实现在新时代工业大踏步追赶世界工业强国的重要战略方向,新能源汽车是主要依靠新型能源驱动的汽车,新能源汽车集机械,电气,化学等领域中的高新技术于一身,车用电机 及其控制系统 是电动汽车动力 传动部件 的核心关键部位 之一,对于 电动汽车 的发展 和产业化进程 至关重要。矢量控制的交流调速系统有着非常好的控制效果,对速 度的控 制和转矩 的控制有 着其独特 的优势,在 各种使用场景都具有良好的适应性,并且减少了对整个系统的投入。无速度传感器是近些年来新兴的一种理论,结合无速度传感器和矢量控制来对异步电动机调速系统进行控制成为近些年的研究方向。
交流异步 电机因 为结构 相对 简 单、成 本较 低、可以长 期稳定 运行等 特 点被可以作为驱动电机使用 在新能 源 汽车上,本文 阐述了新 能源 汽车发 展现状 与未来 发展前 景、异步电动机矢 量 控制 策 略和 无速度 传感 器 技术,并在此基础 上对 电动汽车 异步电机驱动系统进行研究,设计了基于MRAS无速度传感器的异步电动机调速系统,采用了异步电动机的矢量控制系统。
利用MATLAB/Simulink仿真软件,通过模块化的建模方法对系统各个模块分别建模,完成基于MRAS无速度传感器调速系统的建模,获取了相应的波形并分析,验证了正确性。
关键字:电动汽车;异步电动机;矢量控制;无速度传感器;simulink仿真
Abstract
At present, the rapid development of new energy vehicle technology is an important strategic direction for China to achieve the goal of catching up with the world's industrial powers in the new era. New energy vehicles are mainly driven by new energy vehicles, and new energy vehicles are concentrated in the fields of machinery, electricity and chemistry. The high-tech one, the motor and its control system are one of the key parts of the electric drive components of electric vehicles, which is crucial for the development and industrialization of electric vehicles. The vector-controlled AC speed control system has very good control effect, and has unique advantages in speed control and torque control. It has good adaptability in various usage scenarios and reduces the investment in the whole system. Speed sensorless is a new theory in recent years. Combining speed sensorless and vector control to control asynchronous motor speed control system has become the research direction in recent years.
AC asynchronous motor can be used as a drive motor in new energy vehicles because of its relatively simple structure, low cost and long-term stable operation. This paper describes the development status and future development prospects of new energy vehicles, asynchronous motor vector control strategy and none. Based on the speed sensor technology, the asynchronous motor drive system of electric vehicle is studied. The speed control system of asynchronous motor based on MRAS speed sensor is designed. The vector control system of asynchronous motor is adopted.
Using MATLAB/Simulink simulation software, each module of the system was modeled by modular modeling method, and the model based on MRAS speed sensorless speed control system was completed. The corresponding waveforms were obtained and analyzed to verify the correctness.
Keywords: electric vehicle; asynchronous motor; vector control; speed sensorless; Simulink simulation
目 录
第1章 绪论 1
1.1研究背景和意义 1
1.2车用电机控制系统国内外发展历史及现状 2
1.3无速度传感器电机控制的发展现状 3
1.4本文的主要工作 4
第2章 异步电动机矢量控制系统的设计 6
2.1坐标变换 6
2.1.1坐标变换基本思想 6
2.1.2 3/2、2s/2r和2r/2s变换 6
2.2异步电动机数学模型 8
2.2.1 电机在三相绕组中的模型 9
2.2.2 异步电机在αβ坐标系下的数学模型 11
2.2.3 异步电机在dq坐标系下的数学模型 12
2.3 闭环矢量控制系统 13
2.3.1闭环矢量控制系统概念 13
2.3.2 闭环矢量控制 14
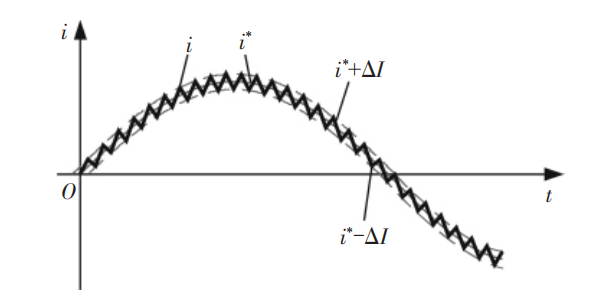
2.4 电流滞环PWM控制技术 14
2.4.1电流滞环跟踪控制技术 15
2.4.2电流滞环跟踪控制的特点 16
2.5小结 16
第3章 无速度传感器异步电动机矢量控制系统的设计 17
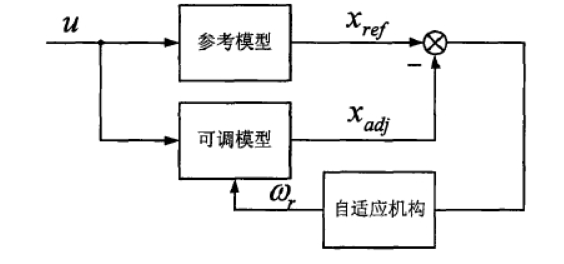
3.1模型参考自适应系统的基础理论 17
3.1.1 模型参考自适应系统的构造 17
3.2 无速度传感器电机的转速估计 18
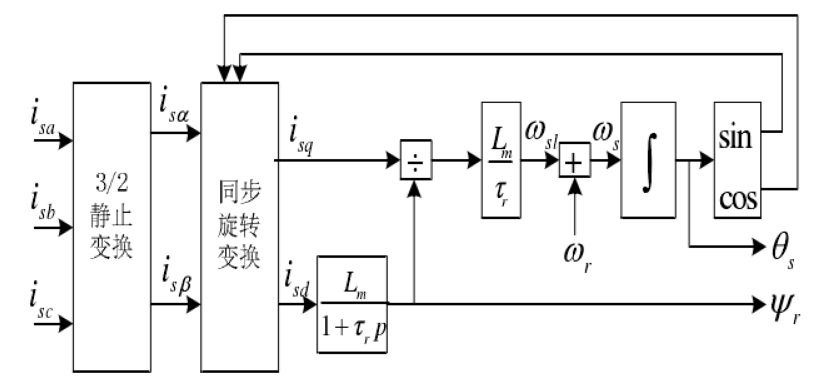
3.3 磁链观测器 18
3.3.1 αβ坐标系下的开环转子磁链观测 19
3.3.2 dq坐标系下的开环转子磁链观测 20
3.3.3 组合模型转子磁链观测法 21
3.4 小结 21
第4章 基于MRAS无速度传感器调速系统硬件设计 22
4.1系统的整体结构 22
4.2系统主电路设计 23
4.3控制电路设计 23
4.3.1电流检测模块 23
4.3.2电压检测模块 24
4.4功率驱动电路 25
4.5小结 25
第5章 基于MRAS无速度传感器调速系统仿真 26
5.1系统的主电路 26
5.1 系统建模 26
5.1.1 异步电动机模块 27
5.1.2坐标变换 27
5.1.3 转速估计模块 28
5.1.4 磁链观测模块 29
5.1.5 CHBPWM模块 29
5.2 系统仿真结果及分析 30
5.3 小结 35
第6章 总结与展望 36
致谢 37
参考文献 38
第1章 绪论
1.1研究背景和意义
随着汽车行业发展趋于成熟,汽车作为代步工具已经在当今社会普及开来,传统燃油汽车的缺点和造成的不良影响越来越受到人们的重视,清洁,绿色,使用电力或者氢气作为主要燃料的新能源汽车慢慢走入人们的视野,我国也越来越重视大量汽车尾气对环境造成的恶劣影响,综合我国要大力发展汽车行业和传统燃油汽车造成的恶劣环境影响,大力发展绿色新能源汽车被我国列为了重点发展战略。新能源汽车最重要的核心关键部件就是车用电机及其控制系统,对电动汽车的发展和产业化进程至关重要。和其他领域相比,电动汽车对驱动电机系统的要求更为严格,新能源汽车用电机工作环境复杂,要求高,需要先进的设计与制造技术的支撑。
20世纪50年代,当时的工业发展大面积的采用了可调速电机。因为在静,动态表现颇为突出,因此直流电动机在调速系统中得到了大范围的使用。到了20世纪末期,交流电动机的发展得到了长足的进步,因其稳定性能好,制造成本低以及抗干扰能力强等各方面优势,使得它在工业生产方面得到了工程师们的青睐。尤其是在矢量控制技术实现之后,使得变频调速的交流电动机将磁通和转矩实现了解耦。因此在许多方面,直流调速系统被交流调速系统实现了后来者居上,矢量控制的变频调速系统在有着较高要求的场合也有了很大程度的应用。直流调速系统控制简单,变流装置结构简单,调速性能好。因此,直流调速系统长期以来在调速传动领域占据主流地位。但直流电动机在结构上存在着一定的缺陷,换向器的存在使得高速、高压直流电动机的制造变得困难,限制了直流电机的功率范围,复杂的电机结构增加了电机的故障率,长期使用需要更换碳刷,增加了系统维护的成本。交流异步电机结构简单,故障率低,工作寿命更长,制造成本低,运行维护费用远低于直流调速系统,更重要的是交流异步电动机能够在恶劣的环境下工作。因此,交流异步电动机受到人们更多的关注,交流调速系统在工业领域得到了越来越多的应用。
无速度传感器有重大的研究意义,因为在现代交流调速系统中,为了获得高性能的转速控制,采用了速度闭环控制,在电机轴上安装速度传感器,但在实际的应用中速度传感器的安装往往受到一些限制,速度传感器的安装降低了系统的鲁棒性和简单性,高精度的传感器往往价格比较高昂,提高了系统的成本等等,对电动机的控制方式研究具有重要意义。
1.2车用电机控制系统国内外发展历史及现状
国际上的电动汽车驱动系统专门供应商并不是很多,主要是由有一定历史底蕴传统机电企业和由相当实力的汽车电子企业或电池企业特定的供应商提供,其主要原因是汽车市场有着比较严格的限制以及电动汽车的用电驱动系统不成熟。电动车辆的驱动电机还有着非常大的发展空间,还处于成长期,前面还有着很长的路要走,虽然已经有产品得到应用,但是还没有能够形成一定的市场规模。在国外可以找到合格的电驱动系统产品,但是由于技术限制和生产限制,其型号和规格都比较少,价格也非常的昂贵,并且由于知识产权、专利等限制,想要在市场上得到合适的产品要花费很大的精力和财力。目前,在SUV平台上,通用汽车公司的双模混合动力技术是一项较为成熟的混合动力技术,它通过将两个电动机和齿轮机构来进行高低速模式的切换。在商用货车领域,伊顿公司的并联混合传动技术在轻型和中型货车上运用的越来越广泛。同时,欧盟委员会发现了新能源汽车不可估量的发展前景提出了许多战略来促进新能源汽车的发展,欧洲的车企也积极响应欧盟委员会提出的战略,抓住发展的机会,在政策的加持下和车企竞争的压力下,欧洲车企做出了积极的调整。日本的车用电机及其控制领域中,以丰田为主要代表,其混合动力技术较为成熟,近些年采用的普锐斯逆变器突破了传统技术的桎梏,采用了最新的封装方式,降低了对昂贵材料的需求,大大降低了整个系统的成本。
我国的新能源汽车发展较国外起步较晚,但是在20世纪末我国就意识到了新能源汽车不可估量的发展前景,在政府的大力支持下,以清华大学,中科院等高校为代表的多所高校也对电动汽车的电机驱动技术展开了探索性的研究。经过多位科学家的不懈努力,我国目前已经掌握了电动汽车车用电机最关键的技术,并成功开发出了能够满足国际要求的样机。这些科研成果为我国自主研发电动汽车并将其实现产业化奠定了重要的基础,极大地提高了我国新能源汽车用电机的研发创新能力。我国的新能源汽车以电力为主要动力,电动汽车主要采用生产成本相对较低的交流异步电机系统和开关磁阻电机,这一类电机具有大功率的特点,其可靠性和运行中产生的噪音水平随着技术的发展已经有了显著的改进,初步具备了市场化的条件。各种以高密度永磁电机为代表的车用电机随着科学技术的发展在实际应用的场景已有了重大突破。这一类电机结构相对较为复杂,运行环境较差,特别是在混合动力的工作场景里,需要和内燃机或变速器进行一体化设计,这样研发和生产的难度就会陡增。无刷直流电机驱动系统在国内一些车企的再开发下,对其进行了改进设计改良了其控制技术,再一步提高了其产品性能,经过一定的改良后已初步满足了新能源汽车的整车要求,初步具备了一体化的设计能力。我国的永磁同步电机驱动系统与国外的先进水平已经接近,我国汽车企业已经具备一定的研发生产条件,但是总体上看仍然与国外先进水平有着一定的差距。
1.3无速度传感器电机控制的发展现状
高性能的电机闭环控制通常离不开转速的闭环,常见的无速度传感器速度估计方法有开环转速估计、模型参考自适应、扩展卡尔曼滤波、滑模变结构控制、转子齿谐波法等。下面对上方法做简要介绍。
开环速度估计法是一种相对简单的无速度传感器设计方案,它计算转速的方法是借助电机转速的数学公式。和其他的转速估计方案相比较,它有着许多优点,如总体计算方法相对较为简单,系统响应速度迅速,但它的缺点也非常明显,电机参数的设置对这种方案的影响非常大,它还存在着积分漂移的问题,最关键的是因为它没有采取闭环的设计方案来对转速进行误差校正,导致它估计转速的效果不理想。
扩展卡尔曼滤波是一种非常复杂的转速估计方法,其计算量非常的巨大,它采用的是一种递推式的估计算法,依照线性系统最小估计理论,对数据双管齐下,同时采集数据和运算。它把电机模型等效为一个线性模型,并且把电机的转速作为一个状态变量进行处理,对电机的转速辨识精度非常的好,同时对实际使用情况中的干扰和噪声影响有着很强的抵制效果。
滑膜变结构控制受电机参数和负载变化的影响波动比较大,具有鲁棒性强,容易实现的特点,但是在变结构切换的时候会出现抖动的现象,非常影响对转速的辨识效果。
模型参考自适应法是本文最终决定采用的一种方案,它是通过磁链和电压方程来建立电机模型。参考模型是其中不含电机转速的方程,而可调模型则是含有电机转速的方程。将两个模型中共同含有的状态变量进行做差处理可以得到一个误差信号,将得到的误差信号通过收敛的自适应控制律进行计算就可以得到电机的转速,然后再将转速信息反带到可调模型中构成闭环系统。通过这样的处理,当相同变量的误差渐渐接近于零时,可调模型中的变量就渐渐接近于参考模型中的变量,如此通过计算所得的转速也就逐渐靠近隐含在参考模型中国的实际转速了。模型参考自适应法是一种闭环控制法,因为闭环的存在使得转速的精度和整个系统的抗干扰能力都得到了很大的提升。
1.4本文的主要工作
本文结合矢量控制理论对三相异步电动机进行控制,使用转子磁场定向控制来进行交流调速,分别观测了不加无速度传感器整个系统的运行情况和在添加无速度传感器后整个系统的运行情况,无速度传感器 的设计 采用的是 模型自适应法,通过 对三相异步电动机和模型自适应 无速度传感器 建模,在matlab/Simulink中 实现 三相异步 电动机 在无速度控制器矢量 控制情况下 的运行,并 得出无速度传感器 的矢量控制方式 的结论。
在本文的第1章 着重介绍了 本文的研究背景、车用电机控制系统 国内外发展 历史及现状和 无速度传感器 电机控制 的发展现状。新能源电动汽车 是未来发展 的一大趋势,随着燃油汽车造成 的环境危害 越来越受到人们的 重视,新能源汽车 在未来的发展前景 是不可估量的,作为其核心部 位的车用电机 控制系统则 更是重中之重,对 车用电机的控制 方式的研究是非常 具有必要性 的,而我国在 这方面还做的 不足,因此 需要加大 车用电机的研究。无速度传感器技术 是一种新兴的 技术,因为在 一些恶劣的工况 速度传感器 无法适应 工作环境或者需要的 造价成本非常高昂,因此 无速度传感器技术的研究 是很必要的,需要对无速度传感器的 常见方法 进行探究。
第2章主要 介绍了异步电动机 矢量控制 的调速方式,介绍 了坐标变换 的主要思想,并简述了 异步电动机 在不同坐标系 下的数学模型 和矢量控制 的基本概念 和原理,最后对滞环控制 的原理和实现 方法进行了 介绍。
第3章的 主要内容 是无速度 传感器技术 的介绍,阐述了 无速度 传感器 的 概念,并选择了模型参考 自适应的方案,对MRAS的概念 和基本原理 进行阐述,介绍了无速度 传感器速度估计的方法 和原理。最后介绍了 磁链观测器 的原理,并对磁链 观测器 在不同坐标系下的的模型进行了研究。
第4章的主要内容 是基于MRAS无速度 传感器的异步电动机 调速系统 的硬件电路,对整个系统的硬件电路进行介绍,然后 再分别从主电路 结构、电流电压检测 模块模块和功率开关模块进行了介绍,并对各模块使用的芯片进行简述。
第5章的内容是 基于MRAS无速度传感器 的异步电动机 调速系统的仿真,通过在MATLAB/Simulink的平台 上对整个电路 各个模块进行 搭建,最终连接 整个 电路完成对整个系统的设计,通过仿真实验验证了设计的正确性。
第6章是对全文的总结。
第2章 异步电动机矢量控制系统的设计
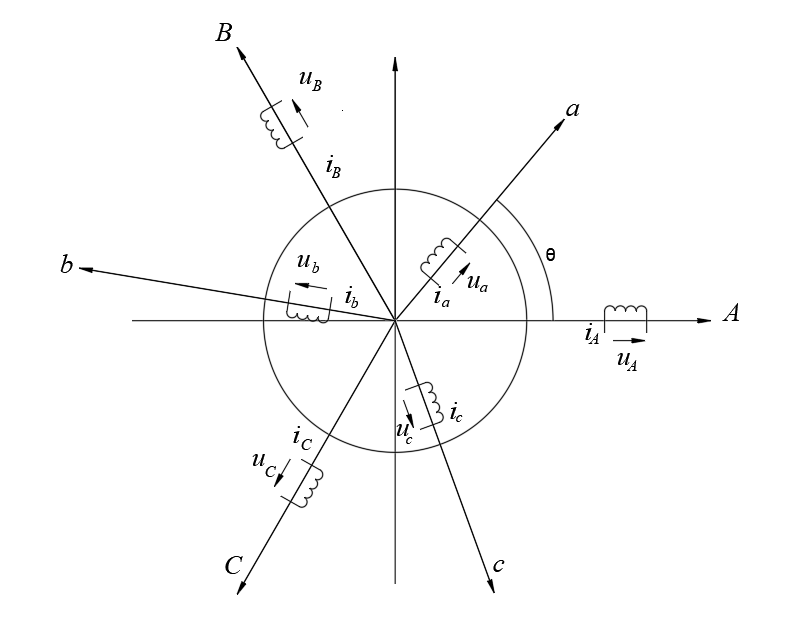
异步电 动机被广泛用于电 机控制中,主要是因 为异步电 动机结构相对简单,价格要比直 流电机低廉很多,方便控 制。对异 步电动机的主 流控制方法有:基于电 机稳态数 学模型的调压调速,基于电 机动态数 学模型的直接转 矩控制,变 频变压调 速和矢 量控制,只有通过参 考电机的动 态数学模 型来进行控 制才能使电机获得较好的调速性能。矢量 控制的 基本思想 是,根据异 步电动机的电磁 方程来在三相 静止坐标系建 立电机的数 学 模型,然后通过克 拉克变 换将三相静 止的坐标系 下的电 机 模型转化为两 相静止坐标系下的数学模型,最后通过帕 克变 换将两相静 止坐标 系下的电 机模型转换为两 项同步旋 转坐 标系下的坐标模型,让异 步电动机三 相静止坐标 系下各个交 流物理量转变成两 相同步 坐标系 下的直流物理量。然后通过精 准的磁 场定向环节,异 步电动机就可以像直流电动机将磁 链和转矩解 耦,并对其 进行分 别控制,以达到理 想的控制 要求。
2.1坐标变换
2.1.1坐标变换基本思想
异步电动 机内部变 量关系非常复 杂,所以我 们需要 通过坐标变换进行解耦,进而我 们可以将异步电 动机模拟为直流电动机,然后以直流电动机的控制 律控制其转矩,所以坐标变换 在矢量控制中占据着非常重要的地位。
2.1.2 3/2、2s/2r和2r/2s变换
(1)三相到两相静止坐标系的变换(3s/2s变换)
三 相到两相静 止坐标系的变换即克 拉克变换,它的目 的是为了将三相静 止坐标系中的各个物 理量转换为两 相静止坐标系中的物理 量,其关 系图如图2.1所示,其中三 相静止坐标系的A轴 与两 相静止坐 标系的α轴重合,两坐标 系的原点也重 合在一起,三相绕组的有效匝 数为,两 相绕组的有 效匝数为。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
您可能感兴趣的文章
- 一种确定磁探针集总电路参数的标定方法外文翻译资料
- 一种人体可接触的大气压低温等离子体射流装置研究(适合电气B方向)毕业论文
- 氩氧中大气压DBD放电特性研究(适合电气B方向)毕业论文
- 大气压氩等离子体射流放电影响因素的仿真研究(适合浦电气B方向)毕业论文
- 含氧高活性均匀DBD改性聚合物薄膜研究(适合浦电气B方向)毕业论文
- 反应器结构对气液两相DBD放电特性的比较(适合浦电气B方向)毕业论文
- 南京某公司研发楼电气设计毕业论文
- 金帆北苑地块经济适用住房——02栋商住楼电气设计(适用于浦电气1004~06A方向学生)毕业论文
- 扬州人武部大楼电气设计毕业论文
- 金帆北苑地块经济适用住房——04栋商住楼电气设计(适用于浦电气1004~06A方向学生)毕业论文



