抑制电气化铁路低频振荡的分数阶控制算法研究毕业论文
2020-03-31 12:03:55
摘 要
电气化铁路低频振荡现象已经危害到了铁路的安全与稳定运行,前人通过改变控制结构,增加系统的阻尼比来改善系统的失稳现象。本文将电气化铁路低频振荡现象与最新出现的分数阶控制研究相联系起来,从而展开了电气化铁路低频振荡的分数阶控制研究。本文首先大致的介绍了电气化铁路低频振荡问题和分数阶研究的现状,并简单的介绍了分数阶控制器设计的问题。随后较为详细介绍了电气化铁路模型的建立,通过将模型进一步简化,在方便对系统分析的同时,也通过根轨迹图形象直观地将电气化铁路低频振荡的原因分析出来了。接着主要介绍了分数阶PI控制器在simulink环境下的设计过程,其中核心是simulink中的s函数。然后确定了分数阶控制器的参数,并将改进后的系统仿真图与原系统仿真图对比,进一步验证分数阶PI控制较传统PI控制的优势。最后总结并展望分数阶控制。
关键词:电气化铁路;分数阶控制;s函数;低频振荡;PI控制;根轨迹图
Abstract
The low frequency oscillation phenomenon in the electrified railway has threaten both safety and steady of the rail , and by changing the structure of control to improve damping ratio of the system , people try to change the phenomenon of such instability . This thesis try to make connection between the low frequency oscillation phenomenon in the electrified railway and the study of fractional control , which appeared recently , to start the study of fractional control in the low frequency oscillation phenomenon in the electrified railway . First this thesis gave a rough introduction about the low frequency oscillation phenomenon in the electrified railway , the current situation of the research of fractional control and the design of machine of fractional control . Then this thesis gave a detailed description about the construction of the model of the electrified railway , and found the reason of instability by root locus mapping . And then this thesis totally told about the procedure of designing fractional PI control in simulink . And next this thesis assure the number of the controller . By contrasting the improved one with the former , it is proved that fractional PI controller is better . The last part of this thesis is the conclusion .
Key words : electrified railway ; fractional controller ; s function;The low frequency oscillation ;PI controller;root locus
目录
第1章 绪论 1
1.1研究背景 1
1.2低频振荡的概述 2
1.2.1低频振荡的分类 2
1.2.2低频振荡的研究现状 2
1.3分数阶控制在低频振荡中的应用 3
1.3.1分数阶控制简介 3
1.3.2分数阶PID控制器 4
1.3.3控制器设计 4
第2章 电气化铁路系统分析 6
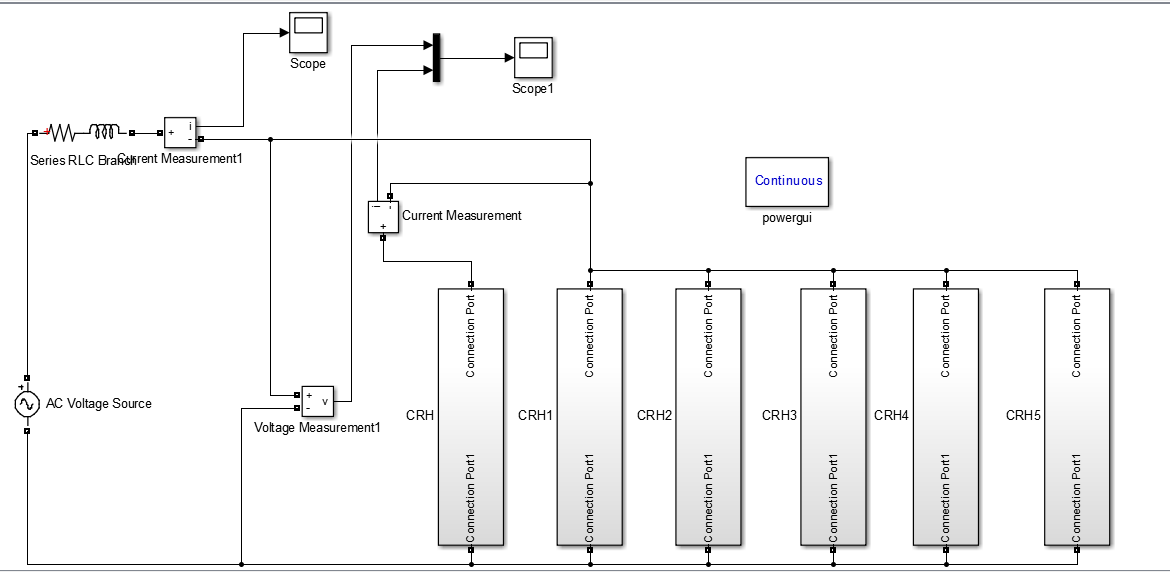
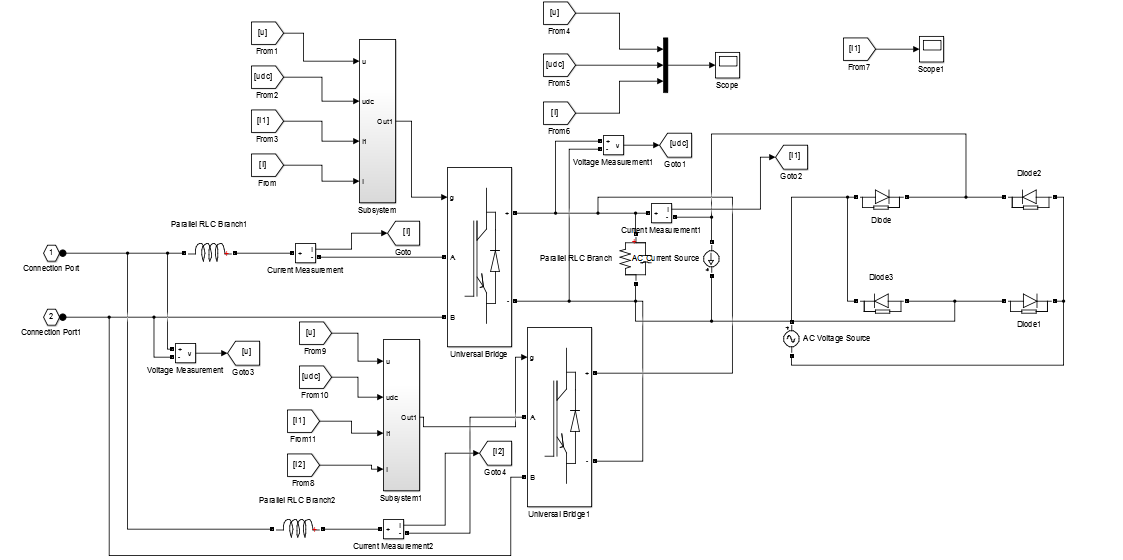
2.1 系统构建的说明 6
2.2 系统模型的构建 10
2.3 系统传递函数 11
2.4 电气化铁路低频振荡的分析 12
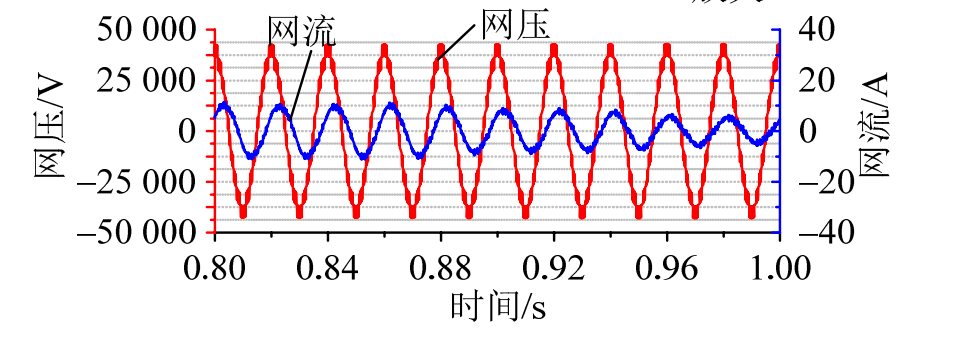
2.5 仿真实验 14
2.6 本章小结 16
第3章 低频振荡下分数阶PI控制器设计 17
3.1 分数阶模型设计原理 17
3.2 分数阶PI控制器在MATLAB环境下的搭建 18
3.3 本章小结 20
第4章 分数阶PID控制器的运用 21
4.1 分数阶PI控制器参数的确定 21
4.2 分数阶PI控制器仿真 22
4.3 分数阶控制器运用需要注意的问题 24
4.4 本章小结 24
第5章 结论 25
参考文献 26
致谢 27
附录A 28
第1章 绪论
1.1研究背景
新世纪以来,电气化铁路的发展突飞猛进,我国高速铁路的发展更是令世人瞩目。我国的高铁同共享单车、移动支付以及网络购物一起走向世界,被誉为中国的“新四大发明”。作为一种极其快捷的交通工具,高铁极大地方便了人们的出行,拉近了彼此之间的联系,给我们的生活带来了实实在在的便利。近年来,高速铁路国产化率不断提高,列车的舒适性与稳定性稳步提升,随着真正意义上的由我国自主研制的高速列车——复兴号的下线运行,我国的电气化铁路的发展又迈上了一个新高度。高速列车已经成为了中华民族的一张新名片,使得我们每一个人都为之骄傲与自豪。
然而,高铁在极大地方便了人们出行的同时,也存在着一些少为人知的技术问题,而电气化铁路低频振荡即是问题之一。电气化铁路中的低频振荡现象指的是:在铁路供电网络中,电力机车投运引发供电网产生低频振荡的现象。该现象的出现会引起铁路网电压失去稳定,进而严重危害列车的稳定运行。该现象早在1996年就曾在挪威发生过,由于挪威这个国家的电气化铁路供电线上的供电频率和电网公司的电网的频率不同,机车变电部门采用了旋转变频机组或静止变流器进行供电制式的转换,当某型号交直交机车投入运行时,引发了采用旋转变频机组牵引变电所的频率为1.6Hz的特征振荡频率,而交直交机车作为旋转变频机组的负荷又进一步减小了这个特征振荡频率的阻尼,使得机组转子运动角频率出现1.6Hz的振荡,从而进一步形成牵引网电压、网流等多个电气量的同步低频振荡,造成电力机车供电中断。2008年1月我国电气化铁路首例牵引网低频振荡现象发生在大秦线(大同—秦皇岛)湖东机务段。机务段里多台电力机车同时升弓受电,诱发了牵引网电压3~4Hz的低频振荡,并多次造成机车变流器牵引封锁,无法正常开出[1]。
上述事件说明,电气化铁路的低频振荡对铁路稳定运营产生了很大的负面影响,研究及解决电气化铁路低频振荡问题就显得极为重要。有关电气化铁路低频振荡现象的研究始于上个世纪末本世纪初,电气化铁路低频振荡的研究刚刚进入初始阶段。由于各国的铁路运营模式有差别,列车控制方式不尽相同,所以对于电气化铁路低频振荡的原因以及应对措施目前还没有一致的结论。
1.2低频振荡的概述
1.2.1低频振荡的分类
根据牵引网供电频率与公用电网是否一致,可以将电气化铁路的低频振荡类型分为I型和II型,即:若牵引网供电频率与公用电网不一致时发生的低频振荡为I型,牵引网供电频率与公用电网一致时发生的低频振荡为II型。王晖和吴命利在《电气化铁路低频振荡研究综述》中指出:I型低频振荡现象是旋转变频机组引起的,当机车投入运行时,引发了采用旋转变频机组牵引变电所的特征振荡频率,而交直交机车作为旋转变频机组的负荷又进一步减小了这个特征振荡频率的阻尼,使得机组转子运动角频率出现振荡,从而进一步形成牵引网电压、网流等多个电气量的同步低频振荡。II型除振荡频率的范围和不涉及旋转变频机组内部的电气量外,其与I型低频振荡在电气特征上无本质差别,II型低频振荡是由多辆机车同时启动引起。
由于我们国家的公用电网频率与机车牵引网频率一致,所以电气化铁路中的低频振荡现象均为II型,II型低频振荡是本文研究的对象,且I型在此不予考虑。
1.2.2低频振荡的研究现状
针对电气化铁路低频振荡(以下无特殊说明,则低频振荡均指II型)问题,刘诗慧、林飞等人在《抑制电气化铁路低频振荡的四象限变流器控制方法》中已经给出了一种解决电气化铁路低频振荡的方法,该文章通过将牵引传动系统建立s域下的模型,从极点分布的角度给出了振荡出现的原因,运用四象限变流器控制的方法,在一定范围内解决了低频振荡问题。体现在系统框图上,就是是在控制器与被控对象之间加入主动阻尼补偿装置,也就是在原系统的输出量处和控制器后加入一阶惯性环节的负反馈环节。其原理为:考虑将直流侧电压信号反馈至电压环控制器之后,二者作差,即可削弱振荡信号,通过反馈环节进行阻尼补偿,实现电流环的稳定跟踪,从而保证系统的稳定[2]。修正后的系统框图如图1.1所示:
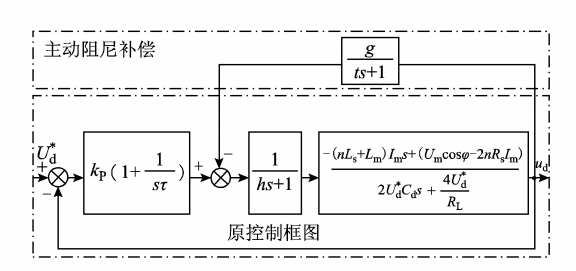
图1.1 加入主动阻尼补偿的闭环系统框图
该控制方法,通过反馈环节增加系统阻尼,提高系统稳定性。在原系统中,同时启动的列车数仅仅在5列左右时,系统就已经接近不稳定。而在校正后的系统中,随着列车数增多,阻尼虽会减小,但稳定性变化空间较大,一般不会出现失稳现象。
1.3分数阶控制在低频振荡中的应用
1.3.1分数阶控制简介
分数阶控制发展的历程相对较短,在传统微积分的基础之上,数学家们通过将积分与微分的阶次变为分数,从而引出了分数阶系统的研究。
Gamma函数、Bata函数和Mittag-Leffler函数等是分数阶微积分中广泛应用的函数。分数阶微积分还没有得到广泛应用原因之一也是由于没有一个统一的定义。目前常用的分数阶微积分定义有GL分数阶微积分定义、RL分数阶微积分定义和Caputo分数阶定义。其中GL的表达式为
 (1.1)
(1.1)
式中
 (1.2)
(1.2)
分数阶微积分RL的定义为
 (1.3)
(1.3)
式中: ,
, 。
。
Caputo分数阶微积分定义为
 (1.4)
(1.4)
式中: ,
, 。
。
上述各算式也就是定义式之间是有关联的,一定条件下他们的表达式是相同的意思。
1.3.2分数阶PID控制器
常规PID控制在控制系统中应用广泛,其具有 、
、 、
、 三个控制参数。相比于常规PID控制,分数阶PID控制器又多了两个可调参数
三个控制参数。相比于常规PID控制,分数阶PID控制器又多了两个可调参数 和
和 。由于
。由于 和
和 值允许取为分数,所以分数阶控制器能够更灵活地控制受控对象,以便得出更好的控制效果。
值允许取为分数,所以分数阶控制器能够更灵活地控制受控对象,以便得出更好的控制效果。
分数阶PID控制器也可简记为 控制器。其传递函数为
控制器。其传递函数为
 ,
,  ,
, (1.5)
(1.5)
其中 是比例常数,
是比例常数, 是积分常数,
是积分常数, 是微分常数。古典的整数阶PID控制器是分数阶PID控制器在
是微分常数。古典的整数阶PID控制器是分数阶PID控制器在 和
和 时的特殊情况。当
时的特殊情况。当 ,
, 时,就是PI控制器;当
时,就是PI控制器;当 ,
, 时,就是PD控制器。由此可见,所有这些类型的PID控制器都是分数阶PID控制器的某一个特殊情况。分数阶PID的设计相对比较复杂,但它对系统的控制却更为灵活,控制效果更好。
时,就是PD控制器。由此可见,所有这些类型的PID控制器都是分数阶PID控制器的某一个特殊情况。分数阶PID的设计相对比较复杂,但它对系统的控制却更为灵活,控制效果更好。
1.3.3控制器设计
若已知幅值裕量 和相位裕量
和相位裕量 ,则可以由此设计出受控对象的分数阶控制器,使其满足系统的性能要求。记受控对象的传递函数为
,则可以由此设计出受控对象的分数阶控制器,使其满足系统的性能要求。记受控对象的传递函数为 ,控制器的传递函数为
,控制器的传递函数为 ,则由幅值裕量和相位裕量的计算公式得
,则由幅值裕量和相位裕量的计算公式得
 (1.6)
(1.6)
 (1.7)
(1.7)
式中 满足
满足
 (1.8)
(1.8)
而 满足
满足
 (1.9)
(1.9)
将 用式1.5代替,则得到如下关系:
用式1.5代替,则得到如下关系:
 (1.10)
(1.10)
 (1.11)
(1.11)
 (1.12)
(1.12)
 (1.13)
(1.13)
满足
 (1.14)
(1.14)
 (1.15)
(1.15)
由于相位裕量 和幅值
和幅值 裕量是已知的,式1.14与式1.15实际上是四个方程,由此就有8个方程和11个变量(
裕量是已知的,式1.14与式1.15实际上是四个方程,由此就有8个方程和11个变量( ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ),其余三个参数可以通过使差平方最小化来决定,即
),其余三个参数可以通过使差平方最小化来决定,即
 (1.16)
(1.16)
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
您可能感兴趣的文章
- 一种确定磁探针集总电路参数的标定方法外文翻译资料
- 一种人体可接触的大气压低温等离子体射流装置研究(适合电气B方向)毕业论文
- 氩氧中大气压DBD放电特性研究(适合电气B方向)毕业论文
- 大气压氩等离子体射流放电影响因素的仿真研究(适合浦电气B方向)毕业论文
- 含氧高活性均匀DBD改性聚合物薄膜研究(适合浦电气B方向)毕业论文
- 反应器结构对气液两相DBD放电特性的比较(适合浦电气B方向)毕业论文
- 南京某公司研发楼电气设计毕业论文
- 金帆北苑地块经济适用住房——02栋商住楼电气设计(适用于浦电气1004~06A方向学生)毕业论文
- 扬州人武部大楼电气设计毕业论文
- 金帆北苑地块经济适用住房——04栋商住楼电气设计(适用于浦电气1004~06A方向学生)毕业论文



