汽车自动停车装置设计毕业论文
2020-04-06 11:21:42
摘 要
近年来,随着汽车数量不断增加,传统停车场已经不能满足人们对停车场效率、安全和管理的需求。因此,国家正在大力发展智能停车场。自动停车越来越受到关注,在有限的空间实现快速无人停车的功能是迫切需要解决的问题。为解决这一现象,结合当下流行的AGV搬运小车,本文设计了一种汽车自动停车装置。
该装置结合了全方位移动机构、升降机构和自动导航机构等部分,可以实现小车全方位移动、原地转向以及车抬板板的升降运动。无人搬运车(AGV)越来越广泛的应用在工业生产实践中,由于具有高智能化,能够节省人工成本和提高生产效率。根据停车需求,提出汽车自动停车装置设计的性能要求,然后提出自动停车装置的总体方案,包括车体机械结构设计、整体布局、驱动方式、路径识别与优化设计。
关键词:AGV;全方位移动;升降
Abstract
窗体顶端
窗体底端
窗体顶端
In recent years, with the increasing number of automobiles, traditional parking garages can no longer meet people's needs for efficiency, safety, and management of parking lots.窗体底端
In recent years, with the increasing number of automobiles, traditional parking garages can not meet people's needs for efficiency, safety, and management of parking lots. Therefore, the country vigorously develops smart parking. Automatic parking is getting more and more attention, and the function of realizing unattended parking in a limited space is an urgent problem to be solved. In order to solve this problem, combined with the current popular AGV handling trolley, this article has designed a kind of automobile automatic parking device. The device incorporates parts such as omnidirectional mobile devices, lifting devices and automatic navigation devices. It can realize the omnidirectional movement, steering of the car, and the lifting and lowering movement of the carrier plate.
Unmanned vans (AGV) are increasingly used in industrial production practices. Thanks to its high intelligence, it can save labor costs and increase production efficiency. According to the demand for parking, the performance requirements for the design of automatic parking devices for automobiles are proposed. Then put forward the overall plan of the automatic parking device. Including vehicle body mechanical structure design, overall layout, drive mode, path identification and optimization design.
Keywords: AGV; Omnidirectional movement; Lift
目录
第1章 绪论 1
1.1课题背景、目的和意义 1
1.2国内研究现状 1
1.3国外研究现状 2
1.4课题研究内容 3
第2章 自动停车装置设计 4
2.1停车AGV系统的总体方案设计 4
2.1.1停车AGV的选择 4
2.1.2停车AGV的关键技术 5
2.1.3停车AGV的总体方案设计 5
2.2停车AGV 的主要设计 5
2.2.1驱动轮的选择 5
2.2.2车体结构的设计 7
2.3驱动系统的设计 9
2.3.1驱动方式的选择 9
2.3.2驱动模块的设计 10
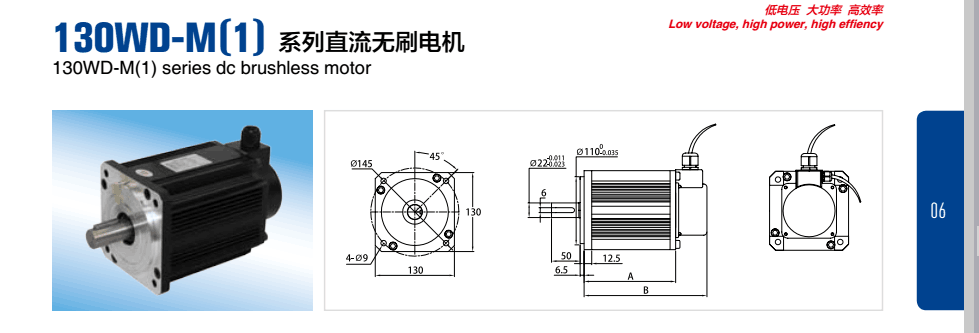
2.3.3驱动电机的选择 10
2.3.3重要零件的设计和校核 16
2.4升降系统的选择 17
2.4.1千斤顶的选择 18
2.4.2螺旋千斤顶的计算 19
2.4.3转向箱的选择 25
第3章 停车AGV的运动分析和运动路径优化 27
3.1停车AGV的运动分析 27
3.2停车AGV的运动路径优化 27
3.2.1停车AGV的冲突类型 28
3.2.1停车AGV的冲突优化 29
结论 30
致谢 31
参考文献 32
第1章 绪论
1.1课题背景、目的和意义
随着国家经济快速发展,人民生活水平不断提高,越来越多的家庭拥有私家车。据公安部统计,截至2017年底,全国机动车保有量达3.10亿辆,其中汽车2.17亿辆;机动车驾驶人达3.85亿人,其中汽车驾驶人3.42亿人。新注册登记机动车达3352万辆,创历史新高。随着我国经济社会持续快速发展,机动车保有量继续保持快速增长[1]。从分布情况看,全国有53个城市的汽车保有量超过百万辆,24个城市超200万辆,7个城市超300万辆,分别是北京、成都、重庆、上海、苏州、深圳、郑州。
汽车数量增加,人们对停车位需求也在不断增长。据统计数据显示,截至 2017年6月,国内停车位需求量达 2.7亿个,预计到 2018年停车位需求量将达到3亿。
目前,我国停车场设施建设速度远远落后现有汽车数量的增长速度,停车位熟练急缺。一方面是地价的不断上升,可供修建停车场的土地面积越来越少。另一方面是汽车数量的日益增长,停车场的车位已经不难满足停车需求。我国私家车保有量出现“井喷式”增长,但长期以来,我国对停车场等问题重视不够,随着时间的推移 ,停车问题愈发严重。
据国家发改委此前发布的数据显示,我国大城市小汽车与停车位的比例约为 1:0.8,中小城市约为 1:0.5,与发达国家的 1:1.3 相比。我国停车位比例仍然偏低,停车设施建设有待完善[2]。
针对停车难的问题,直接解决方案是修建大型停车场。现在部分城市已经出现立体车库,不在局限于一个平面了,从地面发展到地下或者空中,从单层发展到多层。虽然这能够更加的利用有限的土地,但仍然不能够满足现在快节奏的时代。人们经常因为停车而浪费很多时间,比如找车位,到车入库等等。为了解决上述问题,本文设计了一个汽车自动停车装置设计,结合大数据,实现停车场智能化。
1.2国内研究现状
AGV的发展有很长一段时间了,最早出现在1953年。经过60多年的发展,AGV的功能越来越完善,也越来越走向智能化。目前国内AG主要用在物流运输上,这和停车AGV有着异曲同工之妙。AGV智能化程度高,相对于人类来说,AGV能够适应各种恶劣危险的环境,并且不会疲劳,效率高,精度高,而且效率更高。AGV的使用不仅减少工人的工作危险性,还提高了工厂的生产效率,为工厂或者企业减少了大量人工成本。因此,AGV的发展前途有着无限可能。
AGV之所以能够实现能够自动运输,主要是因为它的导航导引功能。目前市面流行的几种导航导引方式有:直接坐标、电磁导引、磁带导引、光学导引、激光导航、惯性导航、视觉导航、GPS(全球定位系统)导航。其中电磁导引广泛应用在工业生产中。激光导引是目前停车AGV的主流技术,由于科学技术的限制,视觉导引仍在不断发展进步,是学者的研究热点。
2016年,AGV的数量和价钱出现此增彼减的现象。主要得益于电商仓储AGV的使用和推广。例如苏宁的智慧物流仓库“苏宁云仓”,京东的“互联网 物流”模式下的京东仓储机器人等等。尤为突出的是苏宁研发的国内首辆物流无人卡车,200米外可以识别障碍物,最高时速可以达80码。
正如俗语所说,“哪里有需求,哪里就有市场”。停车机器人作为AGV的一个衍生应用领域,吸引力一大批AGV企业参与竞争。比如怡丰机器人、海康机器人、昆船智能、西子智能、远能物流自动化等等。其中最为出名的是深圳怡丰机器人科技有限公司研发的一套国内自动泊车机器人。2016年,怡丰公司推出一款汽车搬运AGV机器人,其注意特点是采用了激光导航和梳齿交换功能。这款机器人的定位精准度误差兄能达到5mm以下,行驶最高速度达1.5m/s,平均载重为2.5吨。整个停车取车过程用时很短,并且相比传统停车场同数量的汽车,可以节约40%以上的停车位。
1.3国外研究现状
几年前,当叉车和牵引车这些基础移动机器人广泛使用在各个领域时,国外对移动机器人还不感兴趣。但随着网购的快速发展,智能仓储和智能物流的概念被提起,移动机器人成了一个热门话题。丹麦一家名叫MiR的公司推出一款移动机器人,机器人身上设有两个负载为500—1500kg的移动平台,这极大的增加量机器人的负载能力[3]。加拿大一家名叫Clearpath推出一款OTTO机器人,它的最大承载量是1500kg。2012年,亚马逊以7.75亿美元收购了机器人公司Kiva System,这极大的减少了亚马逊的仓储物流成本。
国外AGV的发展多元化,已经应用在各个领域。比如KuKa的omniMove重负荷平台,装有麦克纳姆轮,能够在狭小空间里保持毫米级的精准度,最大承载量为90吨。印度iFuture Systems公司的Arkrobots,Kiva公司的locus Robotics,GreyOrange公司的Butler等等。这些AGV应用和发展都对停车AGV的出现提供了大多数技术。
国外停车机器人出现时间比国内要早。2014年,德国推出一款停车机器人,能够在任何环境的停车场中使用,它就是停车机器人“Ray”。“Ray”由Serva公司设计,外形和铲车很像,采用了激光导航,最大承载3.3t,可以搬运任何车型[4]。
位于美国新泽西州的公司Boomerang也开发了一个自动停车辅助系统,整个停车过程和玩魔方类似。首先驾驶员需要把车开到一个特定金属架上,然后这个辅助系统会引导一个设备深入金属架下面,将车抬起几厘米高。然后这个设备通过特定的金属轨道将车运输到停车位上。
1.4课题研究内容
本文主要是研究自动停车装置,通过设计AGV结构来满足所需方案要求。并对停车流程,进一步优化自动停车装置。
本文的主要研究内容如下:
- 停车AGV系统的总体方案设计
- 停车AGV的关键部件设计
- 驱动系统的设计
- 升降系统的设计
- 路径的识别和优化设计
第2章 自动停车装置设计
停车AGV,即智能泊车机器人,是一款结合了升级机构的仓储物流AGV的自动停车装置。
2.1停车AGV系统的总体方案设计
2.1.1停车AGV的选择
AGV搬运机器人的引导方式主要有三个:电磁感应式,激光导航式,视觉导航式。
电磁感应式:就是目前工业生产中最常见的磁条导航,在预先设定的路径地面上黏贴磁性胶带,停车AGV通过磁场传感器检测磁带信号控制走行。当AGV自动搬运车经过磁条时,车底部装的电磁传感器会感应到地面磁条地标,从而实现自动行驶运输货物。这种技术成本最低,适应任何环境,目前大多工业生产的自动物流运输都利用了这项技术。
激光导航式:工作原理就是利用光的反射。AGV车上装有可旋转的激光扫描器,并且在沿行驶路径装有反光标志。整个过程中AGV激光扫描器不断的发射激光信号,经过反光标志时,就会接收到反馈回来的光信号,通过车上的计算机进行数据处理,得出AGV当前的位置和运动方向。并且通过控制系统来校正AGV的方位,实现自动运输功能。
视觉导航式:视觉导航,顾名思义就是通过摄像机获取图像信息,从而得知AGV所处的空间以及周围信息。通过车上的计算机进行数据处理,建立环境模型,从而得出一条安全的捷径。目前这一技术主要用在自动驾驶技术上。
电磁感应式虽然最为便宜,但是其站点设置有一定的局限性,并且对场地装修风格有一定影响;视觉导航理论上是最适合AGV搬运小车,但是目前技术仍不成熟;激光导航式精虽然价格昂贵,但其定位精度高,适合任何复杂环境。因此,本次设计采用激光导航式。
目前市面上流行的停车机器人分为三种:梳齿型,车抬板型,挟持轮胎型。
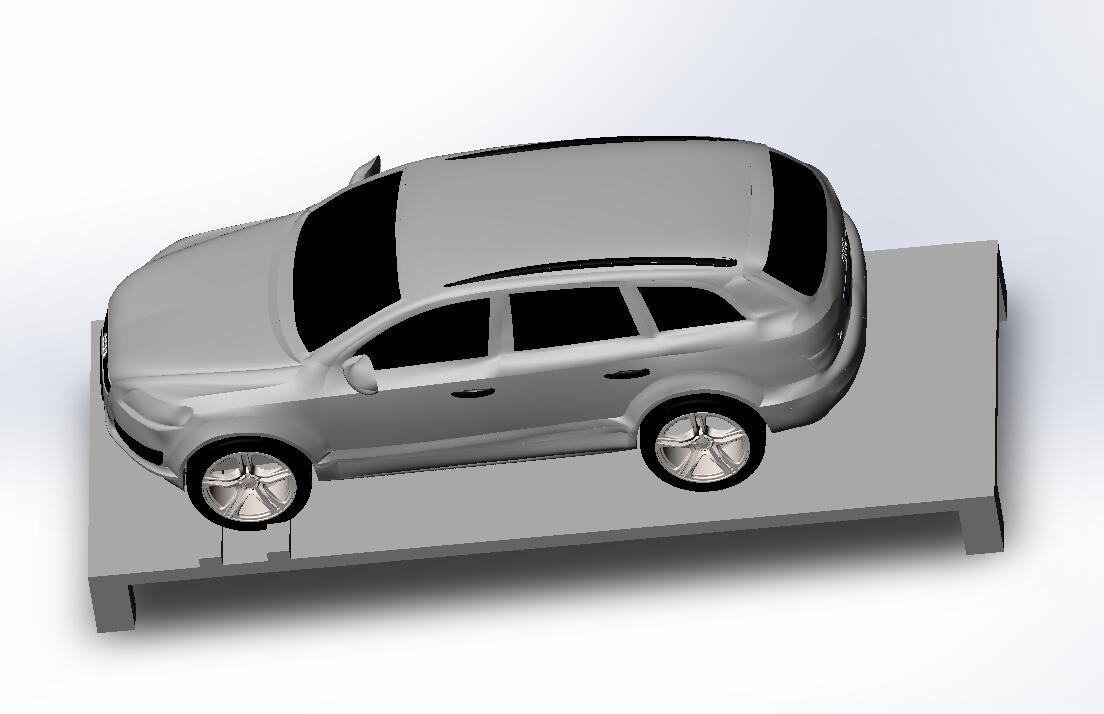
车抬板型:目前智能停车场中应用较为广泛的一种搬运形式。工作方式为:车主把车开到指定的车抬板上,停车AGV钻到车抬板下面,通过升降机构把车和车抬板运输到空闲停车位上。停车完毕后,停车AGV通过升降机构将车和车抬板放下,去运输另外一辆汽车或者在休息区等候指令。这种结构简单,生产成本低并且便于安装。
梳齿型:一个类似于金属梳子的装置。工作方式为:内梳齿设置在汽车支架上,外梳齿安装在AGV上,通过梳齿间隙,AGV通过升降机构完成内外梳齿的穿插换位,从而实现汽车的搬运交换。由于梳齿需要满足承载的汽车的重量需要,梳齿的材料性能和结构尺寸要求很高,难于生产。
挟持轮胎型:最为典型的就是德国泊车机器人RAY。它能直接钻到车辆底下,通过特定的挟持装置将车辆轮胎夹起,然后把汽车搬运到停车位上。这种装置结构紧凑,适应多种复杂场景。
通过对比,车抬板式最为经济方便,因此,本次停车AGV设计选用车抬板式。
2.1.2 停车AGV的关键技术
AGV系统主要包括:AGV地面管理系统、AGV车载控制系统、AGV自主定位及导引系统、AGV运动控制驱动系统、AGV能源系统、AGV无线通讯系统等等[5]。随着科学技术的飞速发展,我们已经进入人工智能时代。通过与人工智能以及其他领域的结合,AGV更加智能化、人性化。现在影响AGV发展的关键技术主要有:传感器技术、导航导引技术、智能控制、技术电源技术。
2.1.3停车AGV的总体方案设计
自动停车装置的系统主要包括驱动系统、机械结构、控制系统、导航系统等等。
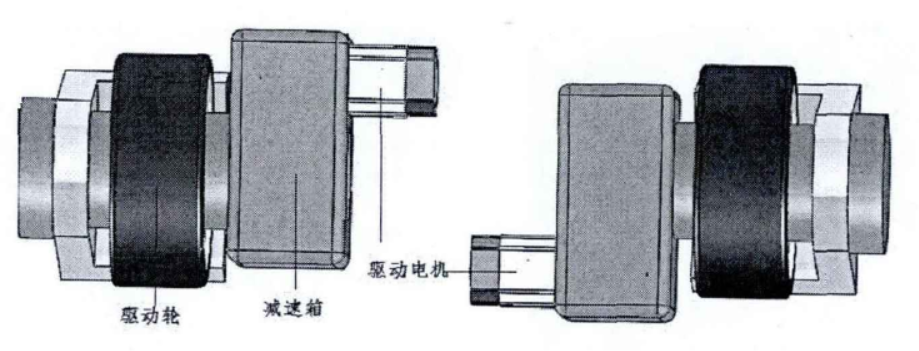
驱动系统主要包括驱动电机、减速器、驱动轮、电动液压升降机、蓄电池等等,主要是为停车AGV提供动力和升降汽车。
机械结构主要包括车体、抬车板和万向轮。抬车板主要配合电动液压升降机升降汽车,万向轮主要是提供支撑以及完成转向运动。
控制系统主要包括小型计算机,通过互联网和大数据完成自动停车。比如接收停车指令,不断反馈路径信息,并优化路径,以及控制驱动电机转速和方向等等,从而实现自动停车。
导航系统主要是利用激光导航,通过停车AGV四周的激光扫描仪,不断向计算机反馈位置信息,精度误差能够保持在5mm以内。
自动停车的流程:车主将车停到抬车板上,车子信息立马被扫描完毕,录入电脑。车主点击app上的停车选项,获得停车码,系统发出停车指令,并开始计费。停车AGV收到停车指令,潜入到抬车板下,通过电动液压升降机将车抬板和车一起升到一定高度,运输到空闲停车位。再次通过电动液压升降机放下车和车抬板。停车位四周设有摄像头,记录车的信息,方便车主取车时,停车AGV可以迅速来到这个停车位取车。停车AGV停好车后自动回到指定休息区,或者收到下一条停车指令重复上述过程。
2.2停车AGV 的主要设计
2.2.1驱动轮的选择
2.2.1.1单轮驱动
单轮驱动中以单舵轮结构为典型代表,示意图如下。单舵轮结构具有很明显的优缺点。它的优点是结构简单,只有一个驱动轮(舵轮),运行较为灵活。缺点是采用了三点支撑结构,运行过程中中心和瞬心不能保持在一个点上,稳定性差,同时转弯半径较大。
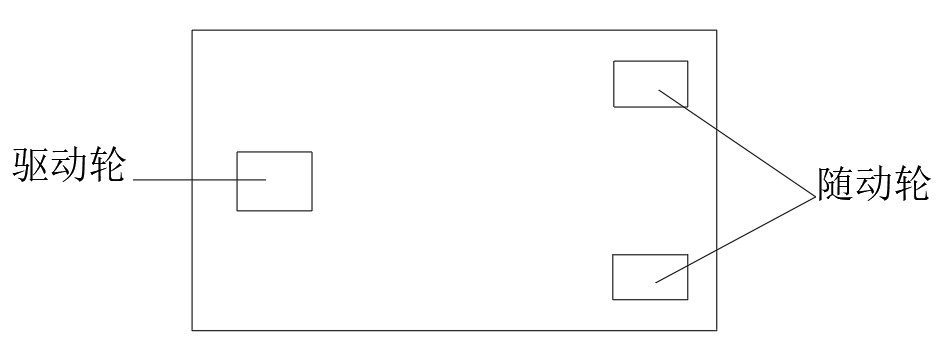
图2-1 单轮驱动示意图
2.2.1.2差速驱动
差速驱动主要应用在四轮和六轮结构中,在四轮驱动结构中。驱动轮可以对角安装,或者安装在车体中间两侧,其余二轮为万向轮。在六轮驱动结构中,两驱动轮装在车体中间两侧,其余二轮为万向轮,示意图如下。差速驱动主要通过两驱动轮的速度差来实现左转弯和右转弯的功能。但驱动轮安装在车体中间两侧时,通过两驱动轮以相同的速度反向旋转,可以实现停车AGV原地转弯。相对于单轮驱动来说,差速驱动稳定性更好,载重能力强,转弯半径小。
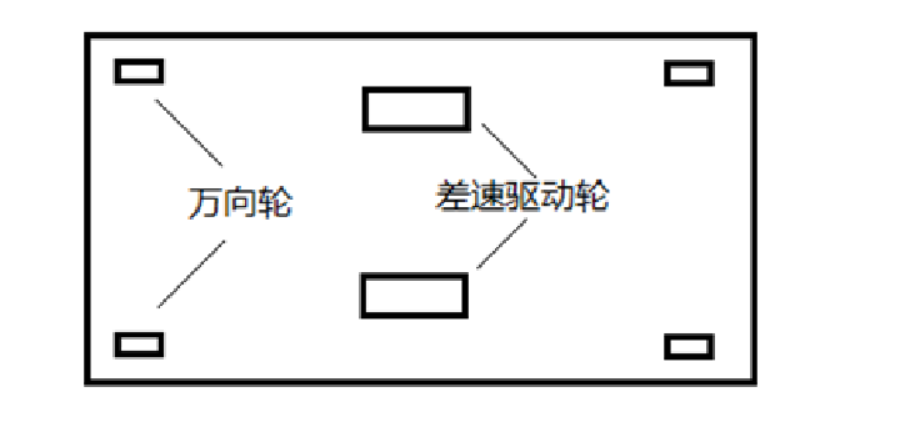
图2-2 六轮驱动示意图
2.2.1.3全方位驱动
全方位驱动AGV一般是由机械结构配合来实现在保证车身姿态不变的情况下任意方向的移动,大多使用的是麦克纳姆轮。如下图所示,全方位驱动AGV使用的四个轮子都是麦克纳姆轮。这种全方位移动方式是基于一个有许多位于机轮周边的轮轴的中心轮的原理上,这些成角度的周边轮轴把一部分电动机轮转向力转化到一个机轮法向力上面。依靠各自机轮的方向和速度。这些力在最终合成在任何要求的方向上产生一个合力矢量从而保证这个平台在最终合力矢量的方向上能够自由移动,从而不改变机轮本身的方向。当遇到路面不平或者路面有较硬颗粒时会导致轮子和地面不能完全接触,影响使用精度[6]。主要特点是:运行环境要求高、稳定性好、控制要求高、灵活性好。
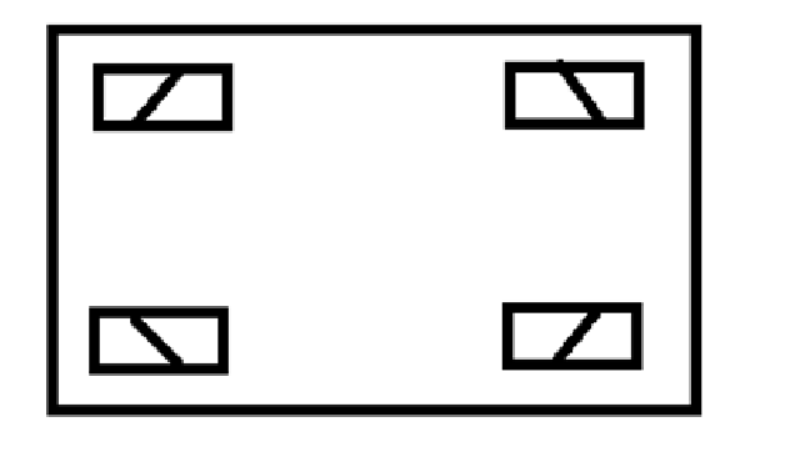
图2-3全方位驱动示意图
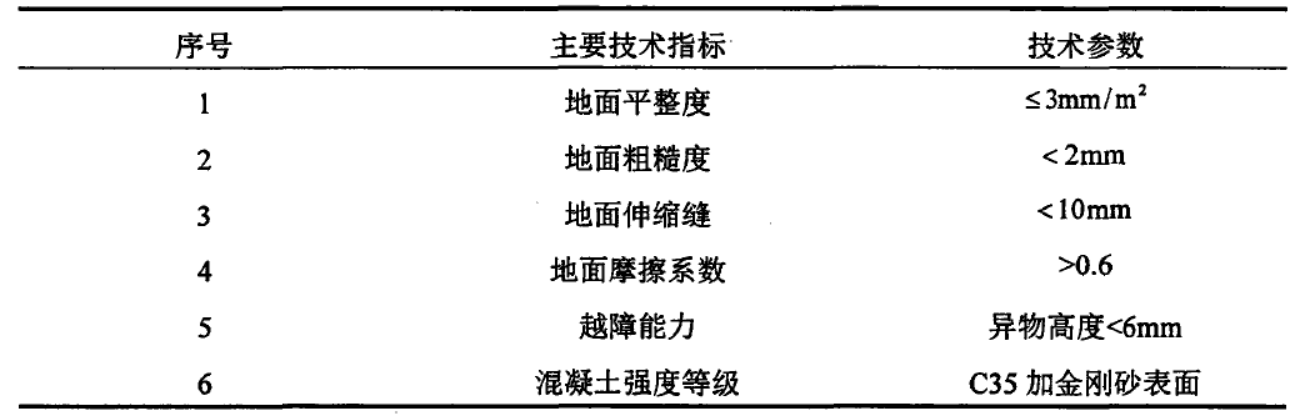
本文设计的停车AGV的停车场是平面。对地面平整度有一定的要求,混凝土地面,因此本次设计采用四轮差速驱动设计。
2.2.2车体结构的设计
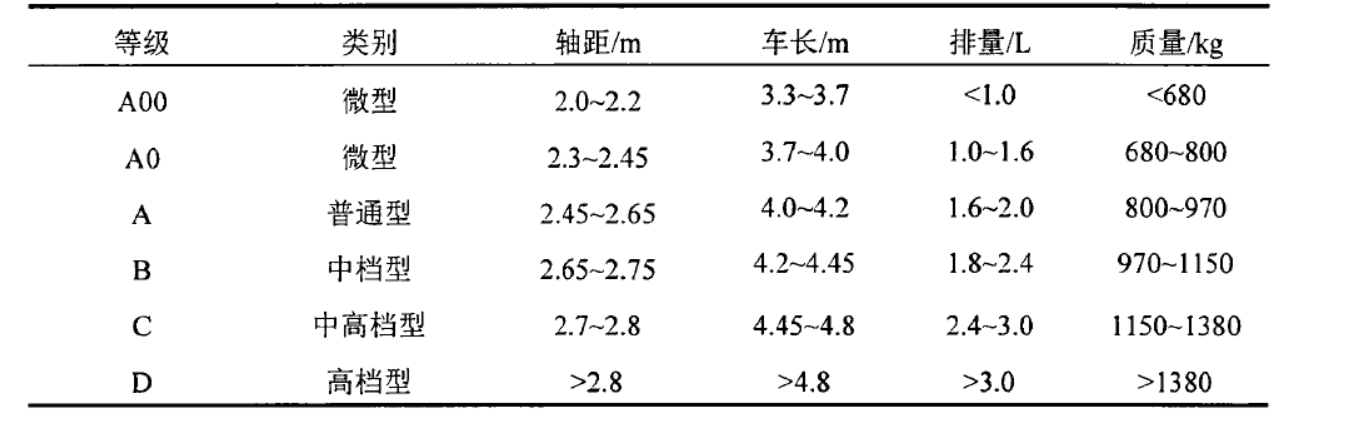
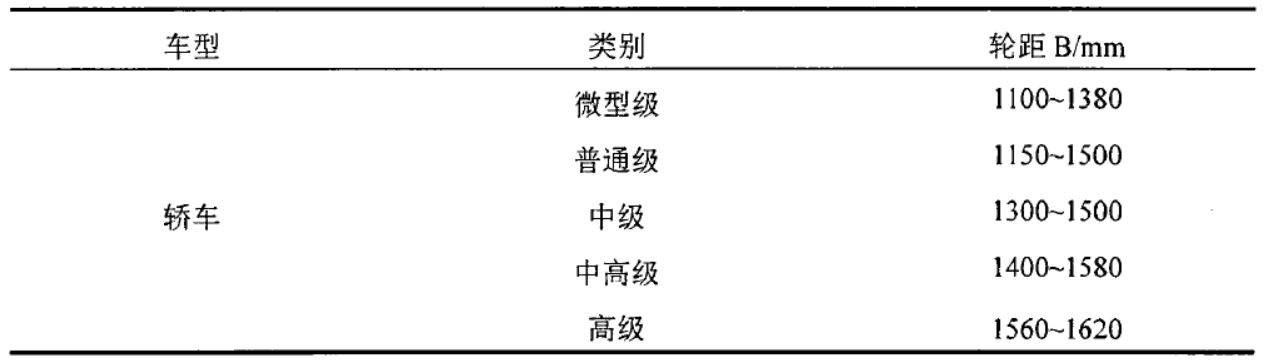
停车AGV 是用来搬运车辆,因此车身结构尺寸需要参考汽车尺寸。由于汽车市场不断有新型汽车的出现,国内没有一份完善的汽车标准。目前国内对汽车车型级别区分有三种方法,一种是根据德系车,一种是根据美系车,也就是通用汽车车型的级别划分方法,还有一种是根据GB9417-89规范来分类,以及由此标准而衍生出来的其他分级标准,比如按车长和轴距。
由于本文设计的停车AGV需要参考汽车的轴距、车长和质量等有关参数。因此参考德系车的分级标准和一种按轮距划分的标准,综合考虑两种标准,从而设计停车AGV的各种尺寸,汽车分级标准如下两表所示[7]。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: