肌电假肢手的运动预测控制毕业论文
2020-04-06 11:07:04
摘 要
旨在辅助残疾人康复的肌电假肢手由肌电信号(Electromyography, EMG)进行运动控制。然而目前的假肢手往往不能实现与人手运动的同步,无法满足对快速性的要求。本文的研究对象为一种肌电控制的欠驱动(4个驱动,16个自由度)拟人假肢手XHand,其拇指侧摆、拇指弯曲、四指右偏和四指左偏的执行分别由拇长屈肌、掌长肌和指浅屈肌的表面EMG信号通过阈值控制来驱动。本文设计了基于时间序列分析的运动预测控制模型和算法,解决了其控制系统造成的运动延迟问题。
本文主要的工作与创新点如下:
1. 在分析XHand设计原理与其控制信号EMG时域特征的基础上,提出了基于最小二乘法渐消记忆实时递推参数估计法的向量自回归时间序列预测模型,并在Anaconda软件平台上实现了其算法,从而对多源EMG信号进行实时预测。
2. 搭建了XHand实验平台,应用本文所建立的模型与算法对经过预处理的EMG信号进行预测,进而用EMG信号的预测值对XHand进行阈值控制,以此补偿XHand在肌电控制过程中由硬件和软件部分造成的运动延迟问题,从而改善XHand运动的快速性。
3. 结果表明,在保持一定精度的前提下,该模型及其算法能较好地实现EMG信号提前50ms的实时预测,从而较好地解决了假肢手的运动延迟问题,进一步实现了XHand与人手运动的基本同步。该方法在数学意义与实际应用中都优于有着极其相似的数学理论的卡尔曼滤波方法。
关键词:拟人假肢手;肌电控制;时间序列分析;运动预测控制
Abstract
The electromyographic prosthetic hand designed to assist the rehabilitation of disabled people is controlled by electromyography (EMG). However, the current prosthetic hands often fail to synchronize with human movement and can not satisfy the requirement of rapidity. The subject investigated is an electromyographically controlled underactuated (4 actuators, 16 degrees of freedom) anthropomorphic prosthetic hand, XHand. It’s driven by the threshold control of the surface electromyography (sEMG) extracting from the surface of the flexor pollicis longus, the palmaris longus and the flexor digitorum superiicialis to perform the thumb swaying, the thumb bending, four-finger right-bias, and four-finger left-bias. In this paper, a motion prediction control model and algorithm based on time series analysis are designed to solve the problem of motion delay caused by its control system.
The main work and innovation of this paper are as follows:
1. Based on the analysis of the design principles of the XHand and the time-domain features of the control signal EMG, a vector autoregressive time series predictive model and algorithm based on fading memory recursive least-squares parameter estimation method is proposed, and the algorithm is implemented via Anaconda, which predicts the multi-source EMG signals in real time.
2. After constructing the XHand experimental platform, the model and algorithm are applied to predict the preprocessed EMG signal. XHand is therefore driven by the threshold control of these predicted values of the EMG signal, by which means the motion delay caused by the hardware and software parts of the XHand in the electromyography control process can be compensated for, thus improving its motion rapidity.
3. The results show that, on the premise of maintaining a certain accuracy, the model and its algorithm can realize the real-time prediction of EMG signal 50ms ahead of time, which eventually solve the motion delay of the prosthetic hand, and further realize the basic synchronization of the XHand and human hand motion. Moreover, this method is superior to the Kalman filtering method with extremely similar mathematical theory both in mathematical meaning and practical application.
Key Words: anthropomorphic prosthetic hand;EMG control;time series analysis;
motion predictive control
目 录
第1章 绪论 1
1.1 课题来源 1
1.2 选题背景与研究意义 1
1.3 国内外研究现状 2
1.3.1 假肢手的肌电(EMG)信号控制 2
1.3.2 时间序列分析 5
1.4 课题研究内容 6
1.5 预期目标 6
第2章 拟人假肢手运动的控制原理 7
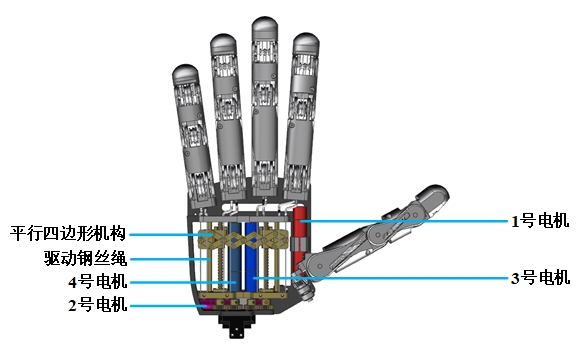
2.1 拟人假肢手的结构简介 7
2.1.1 机械结构 7
2.1.2 电路结构 9
2.2 拟人假肢手的肌电控制 9
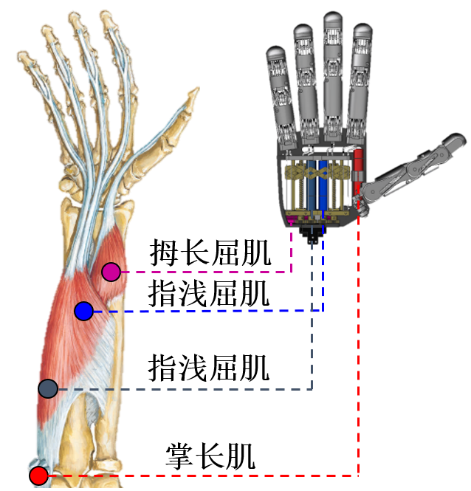
2.2.1 拟人假肢手的控制肌肉 9
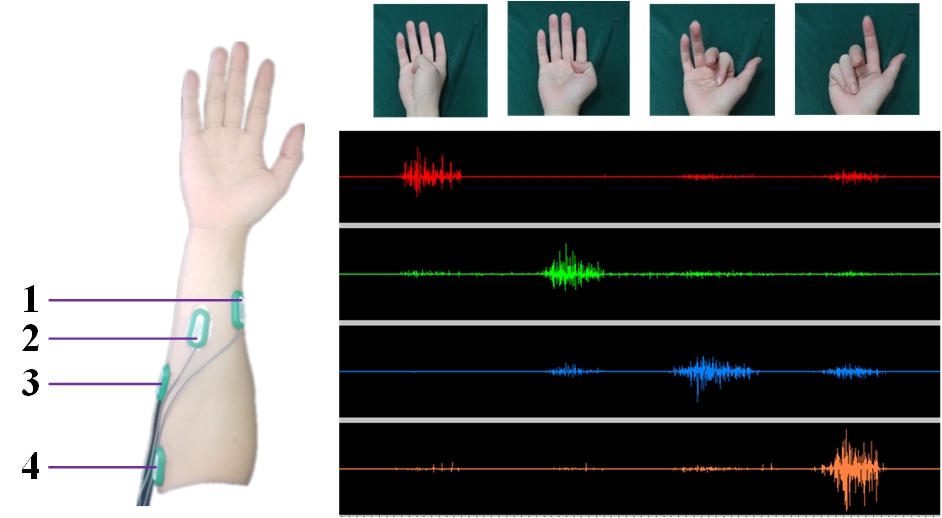
2.2.2 控制EMG电极的配置 9
2.2.3 EMG信号的预处理 10
2.2.4 肌电控制的程序简介 11
2.3 拟人假肢手的延迟分析 13
2.3.1 控制系统的硬件因素 13
2.3.2 控制系统的软件因素 13
2.3.3 解决延迟的方案提出 14
第3章 基于时间序列分析的预测模型 15
3.1 时间序列的基本定义 15
3.2 自回归移动平均 模型 15
模型 15
3.3  模型的等价形式 16
模型的等价形式 16
3.4  模型参数的估计方法 18
模型参数的估计方法 18
3.4.1 递推最小二乘法 19
3.4.2 数据饱和现象 22
3.4.3 渐消记忆实时递推估计法 23
3.5 与卡尔曼滤波的比较 23
第4章 拟人假肢手的运动预测控制 25
4.1 软件平台 25
4.2 实验平台 25
4.3 TCP通讯 25
4.3.1 服务器端 (Server) 25
4.3.2 客户端 (Client) 27
4.3.3 TCP通讯的流程 27
4.4 算法流程 27
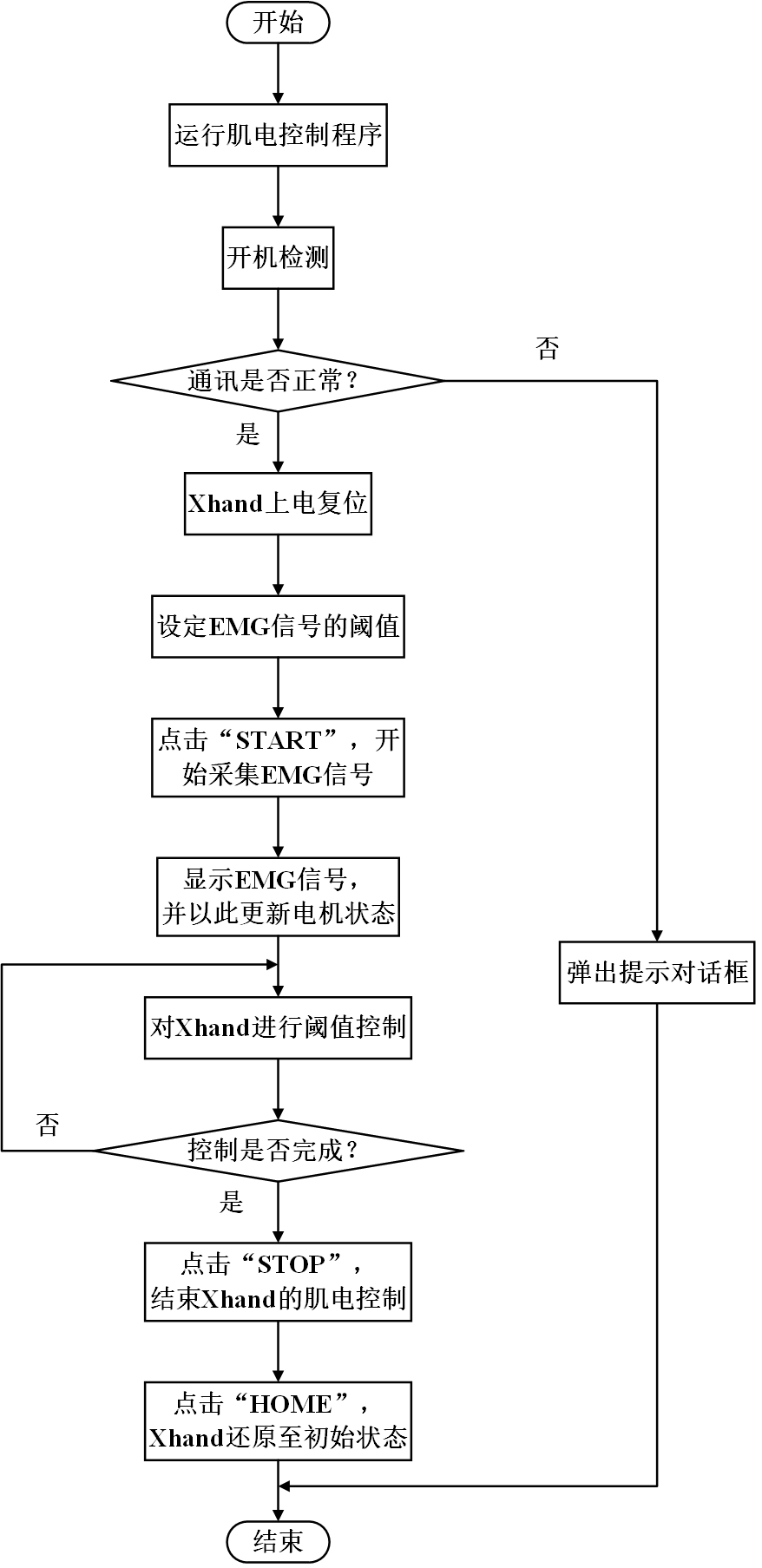
4.5 实验操作 30
4.5.1 EMG信号的采集 30
4.5.2控制实验的步骤 32
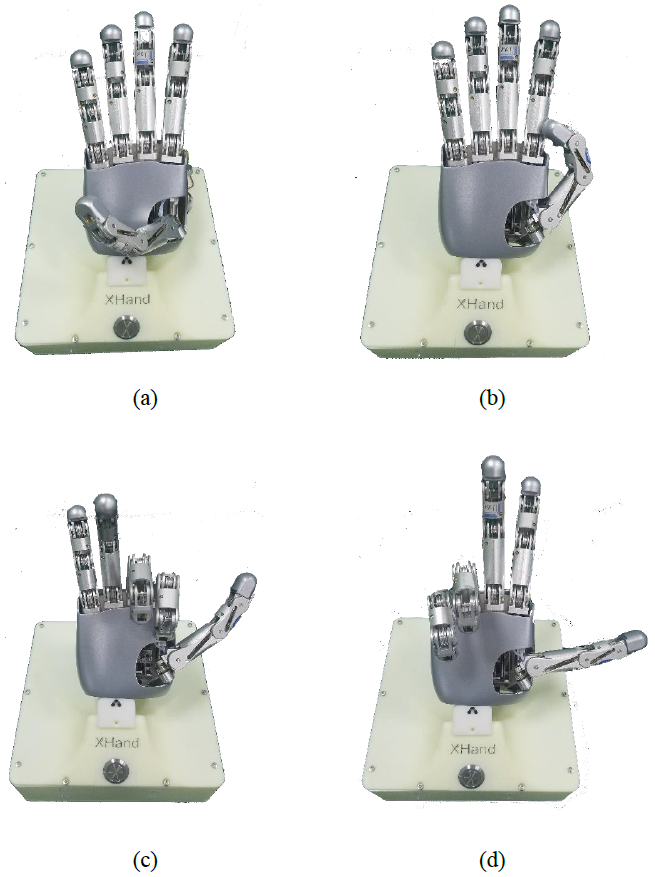
4.6 实验现象 32
第5章 总结 40
参考文献 41
致 谢 45
第1章 绪论
1.1 课题来源
本论文的课题来自于国家自然科学基金重点项目“手眼协调的臂—手假肢系统基础研究”(项目编号51335004)。该项目旨在通过研究人体生理学结构,设计研制出符合人体结构规律的一套臂—手假肢系统,以应用于医疗康复领域。
1.2 选题背景与研究意义
根据中国残疾人联合会截至2018年的最新统计数据,中国的各种残疾人总数已经达到8500万,相当于中国人口总和的约6.21%。并且,肢体残疾人数约为2472万,约占中国残疾人总数的三分之一。因此,我国社会对各类假肢有着迫切的需求。
由于先天性疾病、战争或者事故造成手部缺失的残疾人,在日常生活中遭受着常人无法想象的诸多不便。安置的假肢手应该能够根据操作者的控制意图,实现输入性控制(位置、速度以及抓取力等)[1]。对于假肢手的控制,有多种人体信号源可以选择,如脑电信号(Electroencephalograph,EEG)[2],[3]、植入式神经信号(electroneurographic,ENG)[4]及肌电信号等。其中,表面肌电(sEMG)信号由于其所需装置简单且无需进行外科手术,是假肢手控制在目前所采用的主流方法。
作为一维时间序列信号,表面肌电信号发自于中枢神经脊髓里的运动神经元,是电极所接触到的肌肤皮表下经皮脂、溶液传导的动作电位在空间和时间上的叠加[5]。人脑中产生动作意识后,大脑将发出一系列的神经脉冲,通过神经元传递神经脉冲到相应的肌肉,激活特定数量的运动单元来参与肌肉的收缩运动。肌肉收缩最基本的单元是肌纤维中的运动单元,单个运动单元产生的电位幅值在μV量级,峰值约为200μV,持续时间很短,约为5ms-20ms。表面EMG信号由于同时被浅层肌肉电信号和深层肌肉电信号所影响,在一定程度上能够反映神经肌肉的运动。表面EMG信号承载着运动单元传递的大量信息,其中就包含了肌肉收缩强度和收缩模式等重要信息,因此,可作为假肢手的控制信号。而且表面EMG信号来源于人体本身,因此控制相对可靠,且可以用于辅助残疾人的神经康复训练[6]。
时间序列分析的关注对象为所研究系统的相应输出(响应)。因此,时间序列分析不仅可以剖析时间序列的自身规律、所研究系统以及系统同外界的关系等方面,而且能够推断系统的情况或其行为的走向。时间序列分析对动态数据(时间序列)采取的分析处理方法为参数模型,其过程为,针对动态数据建立参数模型(时序模型),以此得到动态数据的统计特性,从而由模型反映客观事物与物理背景之间的相互联系。因此,时间序列分析方法在预测与控制方面大为发展[7]。
由于以表面肌电信号控制假肢手的动态控制存在着由硬件和软件方面引起的延迟现象,本文旨在提供一个不同于传统控制理论的观点和切入点,开发出一套可行的人体运动意图预测的方法,针对表面肌电信号这种一维时间序列进行处理、分析,建立实时预测模型并设计相应算法,通过预测人体手部运动的下一时刻或者下一时段的状态,提前调整假肢手的控制策略、运动方向和目标位置,从而实现假肢手运动与表面肌电信号同步,甚至假肢手运动超前于表面肌电信号的效果。
1.3 国内外研究现状
1.3.1 假肢手的肌电(EMG)信号控制
肌电假肢手基于骨骼肌中产生的反映用户意图的肌电(EMG)信号。由意图产生的EMG信号被用于诸如比例控制,开-关控制,有限状态机,模式识别和姿势控制等各种解码方法进而来控制假肢手。假肢手的控制依赖于所检测信号的模式以及从中解读的运动意图。为提高假肢手的灵活性,研究人员正试图一方面破译EMG的更多信息,另一方面使用EMG信号接口技术[8]。
1.3.1.1 EMG信号的检测
现代假肢手使用电极通过EMG信号实现人机交互。
表面EMG信号由于仅需在皮肤表面测量,其过程易于操作且为非侵入性,因此被视为首选的控制信号。受到识别获取信号位置的限制,由表面EMG信号控制的假肢手,其灵活性较低。使用表面电极,可以从残肢识别出三到四个可能的位置,以获取用于顺序控制的信号。
肌内EMG信号[9]-[11]的采集需要施行植入肌电传感器的相关手术,因此是侵入性的。然而,内置肌电传感器可以从多个位置收集肌内EMG信号,从而为假肢手提供多个控制度,并且可以实现对假肢手的同步控制。
最近,TMR[12]外科手术正被用于将神经重新连接到可以从表面测量的肌肉组以控制假肢手。TMR对于截肢者是有效的,并且能够实现用户意图。
1.3.1.2 EMG控制的方法
自1948年以来,EMG信号一直被用于假肢手的驱动[13]。目前,各种各样的控制方案已被开发出来用以解码EMG中的信息,通常由控制性质被分为顺序控制和同步控制,假肢手所使用的控制方案大多是顺序控制。
顺序控制一般由以下方法来转换EMG信号:1)开-关控制,2)比例控制,3)直接控制,4)有限状态机控制,5)基于模式识别的控制,6)姿势控制方案,以及7)回归控制方案。
 几种典型的EMG信号处理方法的流程图[8]如图1-1所示。此外,比例控制与直接控制、有限状态机和姿态控制的结合使用,可以效解码来自EMG信号的信息。在这些方案中,表面EMG信号在模数转换之前便被放大和预处理,之后用于解码用户意图并与电机控制器通信以启动适当的电机以实现用户预期的运动。
几种典型的EMG信号处理方法的流程图[8]如图1-1所示。此外,比例控制与直接控制、有限状态机和姿态控制的结合使用,可以效解码来自EMG信号的信息。在这些方案中,表面EMG信号在模数转换之前便被放大和预处理,之后用于解码用户意图并与电机控制器通信以启动适当的电机以实现用户预期的运动。
图1-1 典型的EMG信号处理方法的流程
各种方法的信号处理详述如下。
(1) 开-关肌电控制
传统的开-关控制适用于自由度不多于二的情况。在开-关/二值/继电器式控制中,假肢手以恒定速度沿顺时针方向或逆时针方向运动并可以完全停止。最简单的开-关控制基于EMG的阈值来决定假肢手的控制方向,使得假肢手以与收缩水平无关的恒定速度运动。 同步运动控制可以在电机开启或关闭的情况下进行,并使假肢手以恒定的速度运动[14]。
(2) 比例肌电控制
在比例控制方法中,施加在电机上的电压与EMG信号的收缩水平/强度成正比,可以实现假肢手对大物件的快速抓取。其在上肢控制中的适用性仍在研究中,最近同步比例控制更引人注目。
同步的比例控制针对的是顺序控制方法。比例控制正与其他控制方法[15]-[18]相结合以改善EMG控制方法的灵活性。
(3) 直接肌电控制
直接控制[19]和比例控制类似,对单根手指通过独立的EMG信号进行运动控制。然而,EMG信号的串扰使得对假肢手的独立控制很难实现,这也许能由肌内EMG信号及其植入式肌电传感器来实现[20]。
(4) 有限状态机控制
在有限状态机控制中,假肢手的姿势被预先定义为不同的状态,并且状态之间的转换也是预先定义的或者从输入中解码的。状态转换发生自检测到EMG信号至所需的姿势/功能被最终选择。这种方法适用于固定数量的姿势,并且可能不具备多功能性。
使用模式识别方法可以克服这些限制。
(5) 基于模式识别的肌电控制
基于模式识别的EMG控制通常从在信号处理过程中提取到的分段数据的时域特征中识别信息。由于EMG信号的随机性和非线性性质,自回归(AR)模型[21]-[26]被大量学者广泛研究,以描述其非平稳性。Liu等人发现AR模型阶次小于5时分类准确率的提高更快。AR模型阶次在5及以上时,准确率的提高很少,甚至会达到饱和。Kang等人[27]和Chang等人[28]以EMG信号的倒谱系数作为人机界面的控制指令。
模式识别(分类)将时间序列的特征向量从提取的特征里映射到特定的运动类别内。神经网络(NN)在模式识别中具有区别不同条件的能力,其优点是能够直接学习用于建模的数据中的学习线性和非线性关系。作为开发基于实时模式识别的肌电控制的先驱,Kelly等人[29]使用Hopfield 神经网络来计算时间序列的相关参数和感知器网络从而对EMG信号分类。Wang等人[30]运用含有AR系数的反向传播神经网络。Zhao等人[31]将Levenberg-Marquardt神经网络运用到EMG积分和AR参数模型。Tsuji等人[32]提出了一种将公共反向传播神经网络与回归神经滤波器相结合的神经网络,以便对肌电图进行分类。此外,混合分类技术,如HMM-MLP[33],HMM-遗传算法-MLP[34],和神经模糊[35],[36]正用来改善EMG控制的性能。为了保持控制器中的最佳延迟,进行信号处理是非常重要的[37]。模式识别方法的性能是通过虚拟肌电手动控制实时研究的[38]。
但模式识别方法在识别用户意图时需要训练,并且不能用于比例控制。模式识别通常都采用顺序控制。研究人员正在试图将模式识别方法用于同步控制[39],[40]。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: