基于CANopen协议的AGV控制系统设计开题报告
2020-02-10 22:41:24
1. 研究目的与意义(文献综述)
1.1、研究agv在实际生产中的作用与意义
agv (automatic guided vehicle)即自动导引小车,它是一种以电池为动力,装有非接触导向装置和独立寻址系统的无人驾驶自动化搬运车辆。它的主要特征表现为具有小车编程、停车选择装置、安全保护以及各种移载功能,并能在计算机的监控下,按指令自主驾驶,自动沿着规定的导引路径行驶,到达指定地点,完成一系列作业任务。其系统技术和产品已经成为柔性生产线、柔性装配线、仓储物流自动化系统的重要设备和技术 [17]
agv 的应用代替传统的人工搬运的方式,大大促进了企业的技术进步,改善工作条件和环境,提高自动化生产水平,有效地解放劳动生产力,减轻工人的劳动强度,缩减人员配备,优化生产结构,节约人力、物力、财力,创建人机友好、和谐宜人、科学文明的生产环境。agv 以轮式移动为特征,较之步行、爬行或其它非轮式的移动机器人具有行动快捷、工作效率高、结构简单、可控性强、安全性好等优势。与物料输送中常用的其他设备相比,agv的活动区域无需铺设轨道、支座架等固定装置,不受场地、道路和空间的限制。因此,在自动化物流系统中,最能充分地体现其自动性和柔性,实现高效、经济、灵活的无人化生产。
2. 研究的基本内容与方案
2.1、研究(设计)的基本内容
首先我们需要了解AGV小车在实际生产中所起到的作用,以及它的发展方向,了解基于CANopen协议的AGV小车的控制原理与实现方式。
1.研究AGV在实际生产中的作用与意义;
2.研究并分析CANopen协议;
3.完成基于CANopen协议的AGV控制方案的设计;
4.完成基于CANopen协议的AGV的控制原理与关键技术问题研究;
2.2、研究(设计)的目标
1.完成AGV在实际生产中的作用与意义分析;
2.完成基于CANopen协议的AGV控制系统设计。
3.熟悉并掌握软件,如STM32CubeMX的单片机配置、Keil uVision5的熟练应用等。
4.完成图纸、工艺与验收标准。
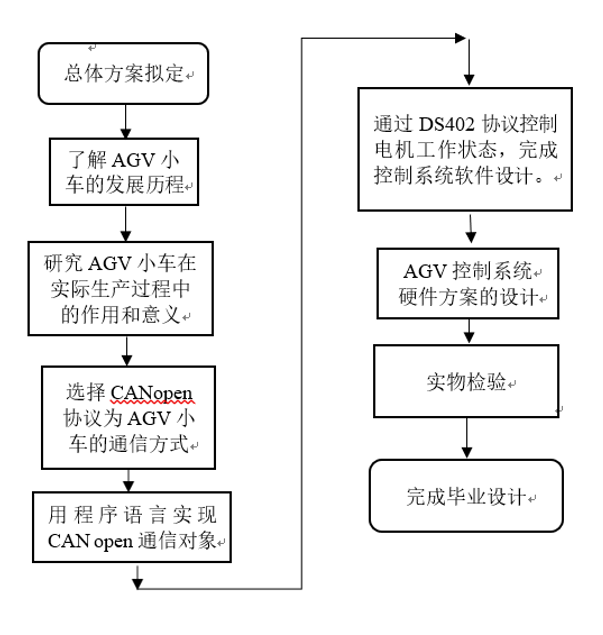
2.3、研究(设计)拟采用的技术方案及措施
经过对比RS485串行总线、CANopen总线和工业以太网EtherCAT三种现场总线技术的优劣,最终选择CANopen现场总线。
本设计采用CANopen协议进行STM32F4微处理器和伺服电机之间的通信。最终控制目的为AGV两台驱动电机差速运转,实现AGV小车的前进,后退,原地左右转弯。
首先分析CANopen协议,将CANopen协议的通信对象用程序语言实现,通过CIADS402伺服驱动控制协议控制伺服电机工作状态,定时发送CANopen报文实现对电机的控制,最终完成控制目标。
基于STM32CubeMX配置单片机,最后将设计的控制系统应用于实物来对研究成果进行检验。
技术方案流程图见图2.1。
| | |
| | |
| | |
| | |
3. 研究计划与安排
第1-2周文献调研;
第3周外文翻译;
第4周开题报告;
4. 参考文献(12篇以上)
[1] 彭文生.机械设计[m].北京:高等教育出版社,2008.11.
[2] 李庆余.机械制造装备设计[m]. 北京:机械工业出版社,2008.7.
[3] 詹迪维. solidworks 2016机械设计教程[m]. 北京:机械工业出版社,2017



