三自由度机械臂系统设计及控制(5kg负载)毕业论文
2020-04-15 17:46:03
摘 要
机械手模仿人手臂的动作所制作出来的一种能自动进行相应动作的一种机器,机械臂的手臂在提前编好程序的动作循环中配合定位装置可以在动作范围内的任何一点自动抓取工件。
本次设计的机械臂采用液压驱动的方式,让机械臂可以根据提前设计好的程序进行相应的动作,机械臂共有三个自由度,分为大臂的升降,手臂的回转以及小臂的伸缩, PLC控制回路中,采用的PLC为FX2N, 连续启动后,机械手就根据所设计的相应程序按顺序运动,按下连续停止按钮后,机械手则完成一个动作循环后停止。
关键词:液压 机械臂 PLC控制系统
Abstract
A robot is an automatic operating machine that mimics certain motion functions of a human arm and is used to grasp or transport a workpiece in a fixed program. The arm of the robot arm can automatically grasp the workpiece at any point within the range of motion in conjunction with the positioning device in the action cycle programmed in advance.
The mechanical arm of this design is hydraulically driven, so that the robot arm can perform corresponding actions according to the program designed in advance. The arm has three degrees of freedom, which are divided into the lifting of the boom, the rotation of the arm and the expansion and contraction of the arm. In the PLC control loop, the PLC used is FX2N. After continuous startup, the robot moves in sequence according to the corresponding program designed. After pressing the continuous stop button, the robot stops after completing an action cycle.
Keywords: hydraulic;mechanical arm,PLC control
目 录
摘 要 I
Abstract II
第一章 绪论 1
1.1工业机器人简介 1
1.2国外机器人的发展 1
1.3我国机器人的发展 2
1.4机械臂的种类和工作参数 3
第二章 4
2.1手臂的运动 4
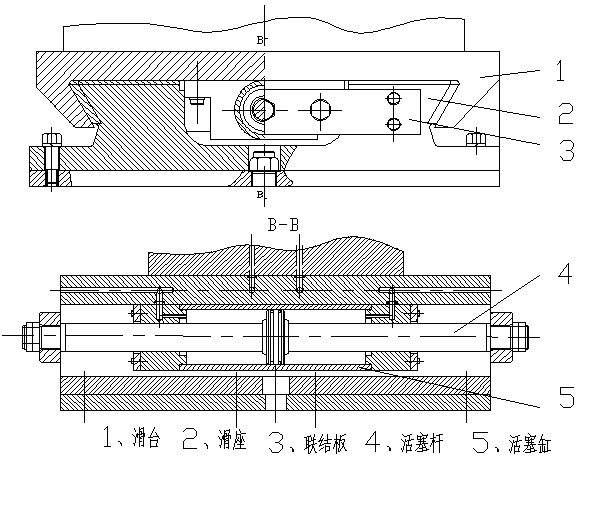
2.1.1手臂的伸缩运动 4
2.1.2导向装置 4
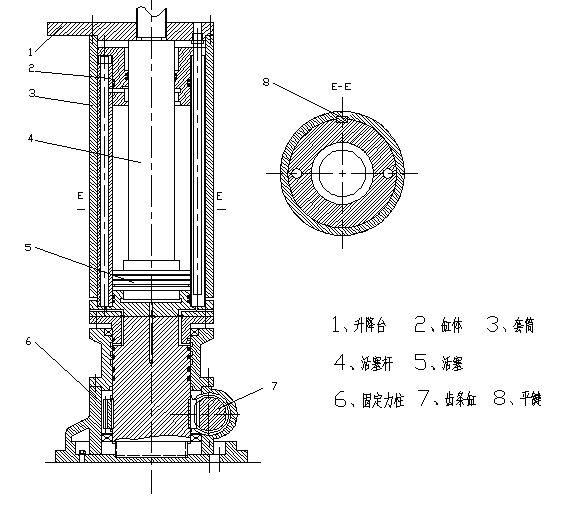
2.1.3手臂的升降运动 5
2.1.4手臂回转运动 6
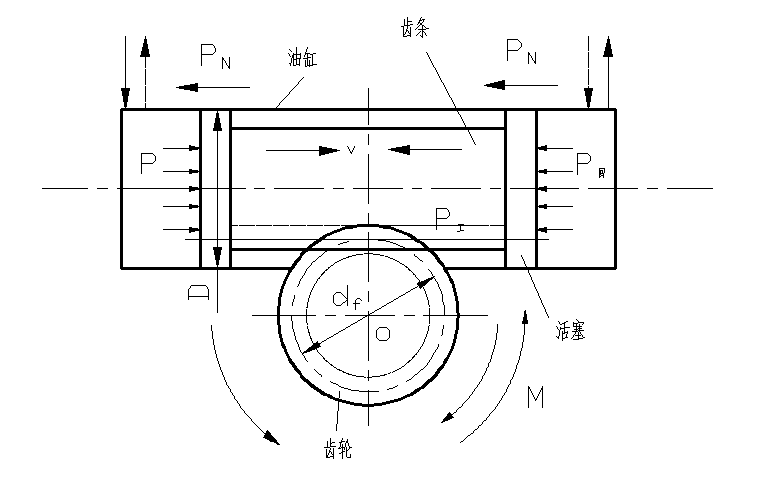
2.2手臂的驱动力矩 7
2.2.1小臂的驱动力矩 7
2.2.2大臂的驱动力矩 8
2.2.3大臂的回转力矩 8
2.3液压缸的尺寸计算 9
2.3.1液压缸的内径 9
2.3.2液压缸缸体厚度 10
2.3.3 液压缸的长度 11
2.4油缸的计算校核 11
2.4.1活塞杆强度计算 11
2.4.2液压缸稳定性计算 11
2.4.3缸筒壁厚的验算 11
2.4.4缸筒的加工要求 12
2.4.5端盖的设计 13
2.4.6 螺栓的校核 13
2.4.7活塞的设计 15
2.4.8机械臂的密封、防尘、和排气装置 15
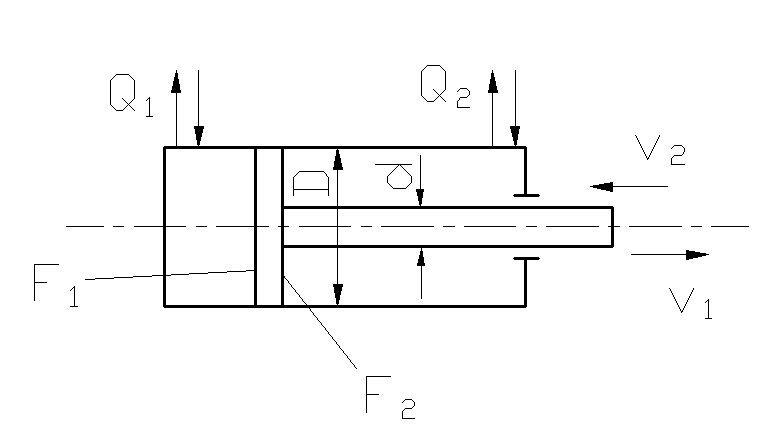
2.4.9流量的计算 16
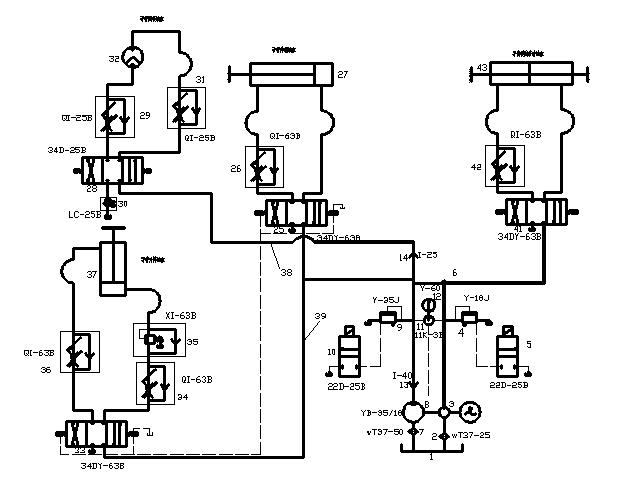
第三章 液压系统的设计 18
3.1液压系统的组成 18
3.2液压系统的回路。 18
3.2.1压力控制回路 18
3.2.2速度控制回路 18
3.2.3方向控制回路 19
3.2油泵的确定 19
3.3液压回路图 20
3.4机械手的动作顺序 20
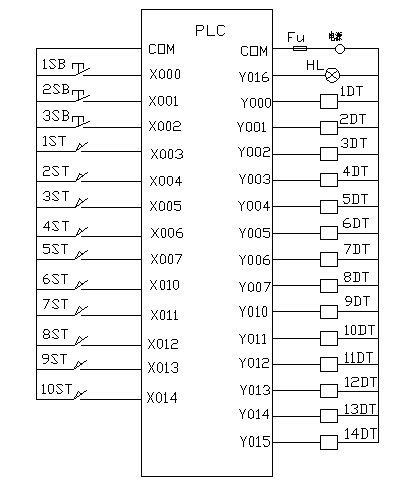
第四章 PLC控制系统的设计 22
4.1工作时电磁铁的顺序 22
4.2输入输出接口 23
4.3 PLC与现场器件的实际连接图 24
4.4梯形图 25
4.5指令程序 26
第五章 成本估算 30
5.1成本估算的意义 30
5.2机械臂的成本估算 30
第六章 结束语 31
参考文献 32
致谢 33
第一章 绪论
1.1工业机器人简介
在很久以前,人们就想从繁重的体力劳动中解放出来,于是制作各种机器的要求应运而生,其中机器人则为其中的代表机器。自从近代第一个机器人被制造出来之后,人们对机器人的研究越来越深入,不同功能的机器人逐渐活跃在各种不同的领域,从天上到地面,从工业机器人到渔业、林业等不同行业的机器人,机器人的影响之大及应用范围之广,是人们从没想到过的。
机器人不是从简单意义上代替了人类的工作,它既有人类在环境中的快速反应能力,又能不惧辛苦的长时间工作,它是时代进步过程中的产物,也是现代制造业不可或缺的支柱机器。
1.2国外机器人的发展
美国、欧洲和日本是工业机器人的主要成产国家和地区,这三个国家掌握了机器人的核心技术,他们也形成了各自的发展模式。美国主要注重于系统的开发与应用,日本主要注重工业机器人的完整的产业链,韩国注重机器人的装配,零部件都由外国进口。
这几个国家的发展趋势也不同,美国主要向军用机器人发展,在销售的军用机器人中,有很大一部分来自美国。日本工业机器人的技术领先了其他各国,也是机器人使用量最大的国家,目前日本保持工业机器人优势的同时向服务机器人发展,来应对本国内的人口老龄化的严重现象;欧洲利用“工业4.0计划”创造了巨大的市场需求,同时也将机器人的标准化与模块化的概念再一次加强,也使机器人的技术向传统行业发展。
在进入二十一世纪之后,随着计算机技术、材料、能源等领域的相继迅速地发展起来,随之来而的是工业机器人的自动化水平不断地被提高,并让机器人研究变成了一个热门的研究领域。而随着工业机器人在生产行业,特别是汽车、建筑、纺织、设备加工、模具等重要领域的生产应用,提出了一个对工业机器人发展的至关重要的问题:他们绝大多数都只能够按照预先设定好的程序代码执行一些既定的指令动作序列,几乎没有罗辑思维的能力,学习能力,应对环境变化的能力。因此,当前机器人的发展方向主要是在如何增进机器人的智能化程度,而这就需要先进的传感设备,智能化的软件,先进的算法等,与传统的制造业相关领域进行有机地结合。当前,工业机器人的研发和市场化是各个企业乃至国家不断追求的目标,国外很多国家都将机器人产业作为国家的重要支柱产业,同时花费大量资金不断对机器人的前沿技术进行攻克,力求不断创新,机器人的发展成为了各国的核心。
1.3我国机器人的发展
虽然我国对机器人的研究起步较晚,但是在机器人行业取得了很多的成就。我国主要向服务机器人发展,对于服务机器人的基础技术进行了深入的研究,并且研发出了消防机器人、医疗机器人以及搜救机器人等系列的产品,对地震等灾害中发挥了巨大的作用。随着我国工业化进程的发展,对工业机器人的需求也比较大,工业机器人的潜在市场还有待开发。
随着2025计划的提出,汽车生产等制造产业也大幅发展,这推动了工业机器人数量的迅速上升。一些大型工程如水利水电、工程建筑等行业环境恶劣,间接促进了要求机器人的技术的进步。例如利用焊接机器人焊接建筑工程机械中的结构件,不仅提高了焊接的质量,也节省了焊接的时间,最大限度地满足了市场需求,所以现在越来越多的机械采用工业机器人进行焊接工作。现今国内工业机器人发展如火如荼,普通的工业生产线应以机器人为核心拓展出一套完备的产业体系,不断提高产品质量,降低成本,增强人机之间的信任,大幅提高生产力。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: