自动喷漆生产线上下料气动机械手设计毕业论文
2020-04-12 16:20:29
摘 要
在胶件玩具的生产加工的过程中,要求对玩具进行喷漆作业,国内的胶件玩具作业的喷涂大部分还是靠手工完成,对人危害很大。所以,喷漆生产线的自动化就显得尤为重要,既提高了生产效率又改善了工人的作业环境。本文应用气动技术,利用模块化的思想搭建和完成喷漆生产线上其中三个模块的设计。
本文首先研究自动喷漆生产线的背景及意义,确立设计目标。然后明确整个系统的运行要求和功能要求,再拟定总体方案,再分别对玩具的自动喷漆输送的工件夹持模块、底模夹持模块和底模循环模块进行功能分析,设计各个机械手的结构和气动回路,进行选型计算确定最后的结构。最后用PLC编程实现顺序控制,根据运动工序先画出X-D线图排除障碍信号,再画出各模块的梯形图,并有电源保护急停等措施。
最后完成了三个模块的机械手设计和PLC编程控制。基于模块化的思路,便于搭建生产线。最复杂的是利用X-D线图排除多缸多往复回路障碍信号的问题,还有如何用最简单结构实现所需功能等等。
关键词:自动喷漆;生产线;气动技术;机械手;PLC
Abstract
In the process of production and the processing of plastic pieces of toys, it is required to spray-paint on the toys, and most of the domestic plastic toy spraying are done by hand, which is very harmful to humans. Therefore, the automation of the paint production line is particularly important, which not only improves the production efficiency but also improves the working environment of the workers. This paper applies pneumatic technology and uses modular ideas to build and complete the design of three modules on the paint production line.
This article first studies the background and significance of the automatic paint production line and establishes the design goals. Then, the operational requirements and functional requirements of the entire system are clarified, and the overall plan is formulated. Then, the functional analysis of the workpiece clamping module, the bottom mold clamping module, and the bottom mold circulation module for the automatic paint delivery of the toy is performed., the structure of each manipulator and Pneumatic circuit are designed., and each element is selected and calculated to determine the final structure. Finally, PLC control is used to achieve sequential control. According to the movement process, the X-D line diagram is first drawn to remove obstacle signals, then the ladder diagram of each module is drawn, and power supply protection emergency stop and other measures are taken.
Finally I completed the three module manipulator design and PLC programming control. Based on a modular approach, it is easy to build a production line. The most complicated problem is to use the X-D line diagram to eliminate the problem of multi-cylinder multi-reciprocal loop obstacle signals, and how to use the simplest structure to achieve the required functions and so on.
Keywords: automatic painting; production line; pneumatic technology; manipulator; PLC
目 录
摘 要 I
Abstract II
1 绪论 1
1.1研究背景 1
1.2国内外研究现状和意义 1
1.2.1国内外现状 1
1.2.2设计的意义 3
1.2设计的主要任务和路线 4
1.2.1主要任务 4
1.2.2设计的预期目标 4
2 自动喷漆生产线上下料气动机械手总体方案设计 6
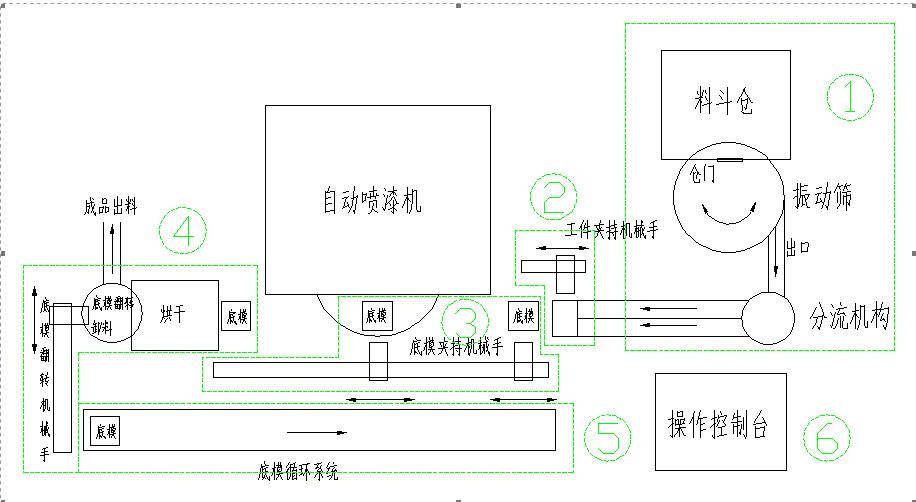
2.1自动喷漆生产线上下料气动机械手总体任务方案设计 6
2.1.1工件夹持机械手功能分析和结构设计 7
2.1.2底模夹持机械手功能分析和结构设计 8
2.1.3底模翻转机械手功能分析和结构设计 9
2.2气动控制回路的设计 10
2.2.1工件夹持模块气动回路的设计 10
2.2.2底模夹持模块气动回路的设计 11
2.2.3底模翻转模块气动回路的设计 11
2.3本章小结 12
3 气动系统的设计选型与计算 13
3.1气动执行元件的选型计算和结构的确定 13
3.1.1吸盘及真空发生组件的选型计算 13
3.1.2工件夹持机械手气缸的选型计算和结构的确定 15
3.1.3底模夹持机械手气缸的选型计算和结构的确定 17
3.1.4底模翻转机械手气缸的选型计算和结构的确定 20
3.2控制元件的选型与计算 23
3.2.1方向控制阀的选型与计算 23
3.2.2流量控制阀的选型与计算 23
3.2.3压力控制阀的选型与计算 24
3.3气动辅件的选型与计算 24
3.3.1真空压力开关的选型 24
3.3.2消声器的选型 24
3.3.3软管和管接头的选型 24
3.3.4磁性接近开关的选型 24
3.3.5空压机的选型 24
3.3.6气动三联件的选型 26
3.4本章小结 26
4 生产线控制系统的设计 27
4.1PLC硬件的选型 27
4.2工件夹持模块PLC设计 27
4.3底模夹持模块PLC设计 29
4.4底模翻转模块PLC设计 30
4.5本章小结 32
5 经济性和环保性分析 33
5.1系统的经济性分析 33
5.2系统的环保性分析 33
6 总结与展望 34
6.1总结 34
6.2展望 34
参考文献 35
致谢 36
1 绪论
1.1研究背景
胶件玩具是玩具中种类最丰富的一种玩具,例如各式各样的玩偶。由于其价格便宜、造型优美、色彩丰富、便于携带、容易清洗等等优点,受到许多人的欢迎特别是儿童。所以相应的玩具的制造与之在玩具市场就理所当然的占据了很大的比例。图1.1是一种塑胶玩具。

图1.1 塑胶玩具
有如此高的比重,其生产效率自然就是一个很令人关注的问题。除了外形的加工外,其表面处理的方式一般都是喷涂,即是喷漆在玩具上使其更加美观。喷漆的方式一般分为手动喷漆和自动喷漆,但目前,国内的胶件玩具作业的喷涂大部分还是靠手工完成,没有建立自动化的生产线,工作的效率低,还有各种不足,所以自动喷漆生产线的搭建就迫在眉捷。
1.2国内外研究现状和意义
1.2.1国内外现状
(1)国内现状
胶件玩具的生产加工的过程中,要对玩具进行喷漆作业,相对于国外来说特别是如德国之类的工业比较发达的国家,我国在这方面的自动化工厂还是很少的,在国内的胶件玩具作业的喷涂大部分还是靠手工完成,即是工人手持喷枪对玩具喷涂,这种方法不仅劳动强度大,而且喷涂效果也一般,最重要的是油漆雾化后有大量漆尘漂浮在空气中,会对环境造成极大的污染,同时会对工人的人身造成较大危害。随着手工喷涂胶件玩具的劣势慢慢显露出来和工业机器人大力发展,市场上开始出现了玩具喷涂机,一定程度上改善了操作工人的工作环境,但是还需要多名工人操作才能完成整个喷涂过程,过程繁琐,工作效率很低。总的来说,国内部分的塑胶玩具生产线的工作效率和自动化程度还处于较低的水平。虽然中国的的工业机器人在不断的进步,但和国际同行相比,差距依旧明显[1-2]。图1.2是国内某人工喷涂生产线。

图1.2 某种人工喷涂生产线
(2)国外现状
上个世纪五十年代初,喷涂机器人最先出现在国外1951年,美国Austin Motors Longbridge公司开始尝试利用简单的三轴机器人定点自动喷涂车辆的外身。1958年,美国Morris Motors Cowley公司成功安装了一条高产出的涂装生产线,把汽车外身的所有涂装工作交给三台三轴机器人[3]。发达国家尤其是欧美早在20世纪70年代就基本实现了制造自动化。以机器人为代表的各种自动化专机及自动化生产线广泛应用在汽车、电子、家电、轻工、机械制造、物流与仓储等行业,保证了产品的高质量和生产的高效率,大大推动了这些行业的快速发展,提升了其制造业的技术水平与创新能力[4]。所以国外制造业已经发展得很成熟了。
国外机器人喷漆技术也早已经处于应用于市场上,而且为了适应市场需求的飞速发展,以前的刚性自动喷漆线都已经改为了以机器人为主体的柔性自动喷涂线。Werner等通过对模块化自动生产技术的进一步分析和实践指出(MPS)同样能够为成批量,是一类性能极佳,经济性较高的系统[5]。Bruno和Lotter等基于IMS智能制造系统与模块化自动生产技术相融合形成一种制造系统模型,将制造系统与模块化自动技术有机的结合在一起[6-7]。国外的自动化技术已经和制造业紧紧的结合在一起,形成了许多的自动化工厂。
1.2.2设计的意义
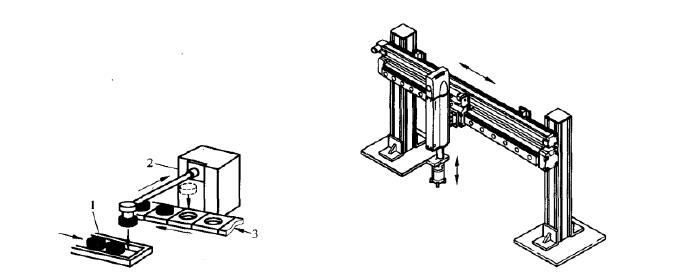
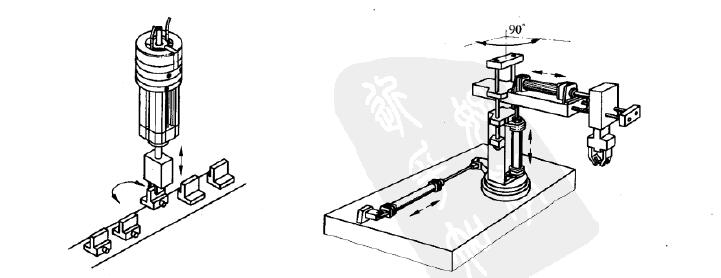
在现在的玩具喷涂背景之下,传统的手工作业已经严重影响了胶件玩具制造业的发展,自动喷漆生产线的开发与设计就显得迫在眉睫,既可以提高生产效率,降低工人数量,又能改善喷涂环境,减少对人、对周围环境带来的危害。图1.3,1.4是两个自动喷漆生产线的两个例子。生产线的自动化,就是一个用机器人或者其他的设备来代替人工作的过程,让人摆脱了这种高强度的重复劳动,也在另外的一个方面提高了整体的生产效率,大大加速了制造业的发展。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: