MQ4040四连杆门座式起重机人字架结构CADCAE毕业论文
2020-04-12 15:56:38
摘 要
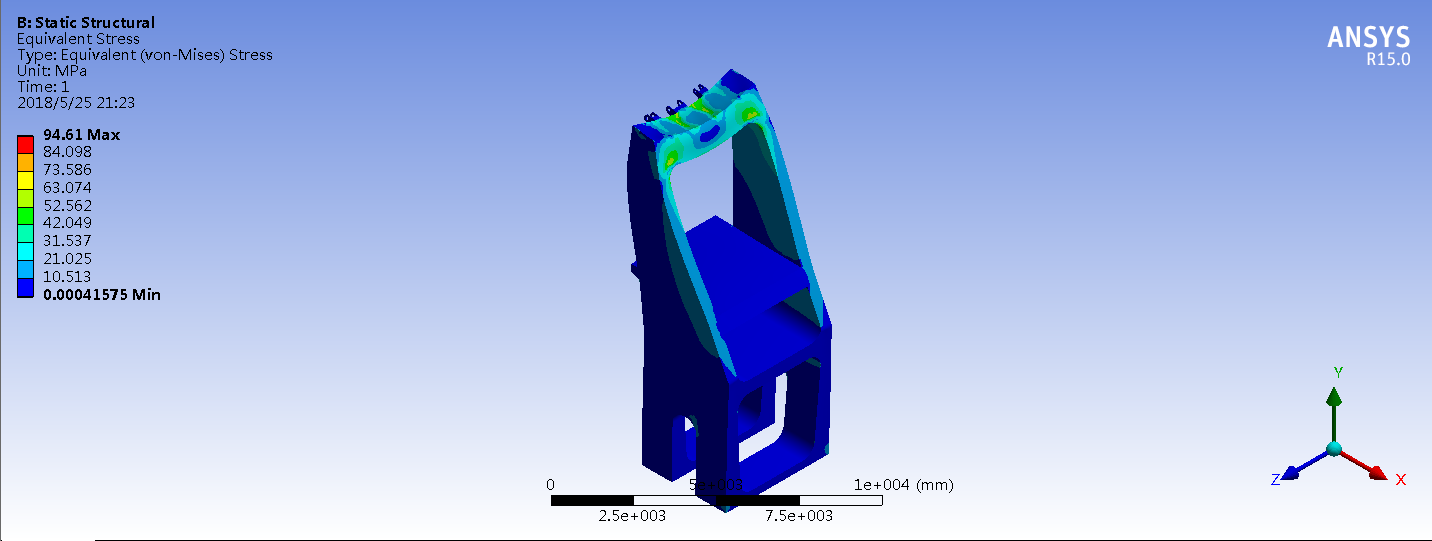
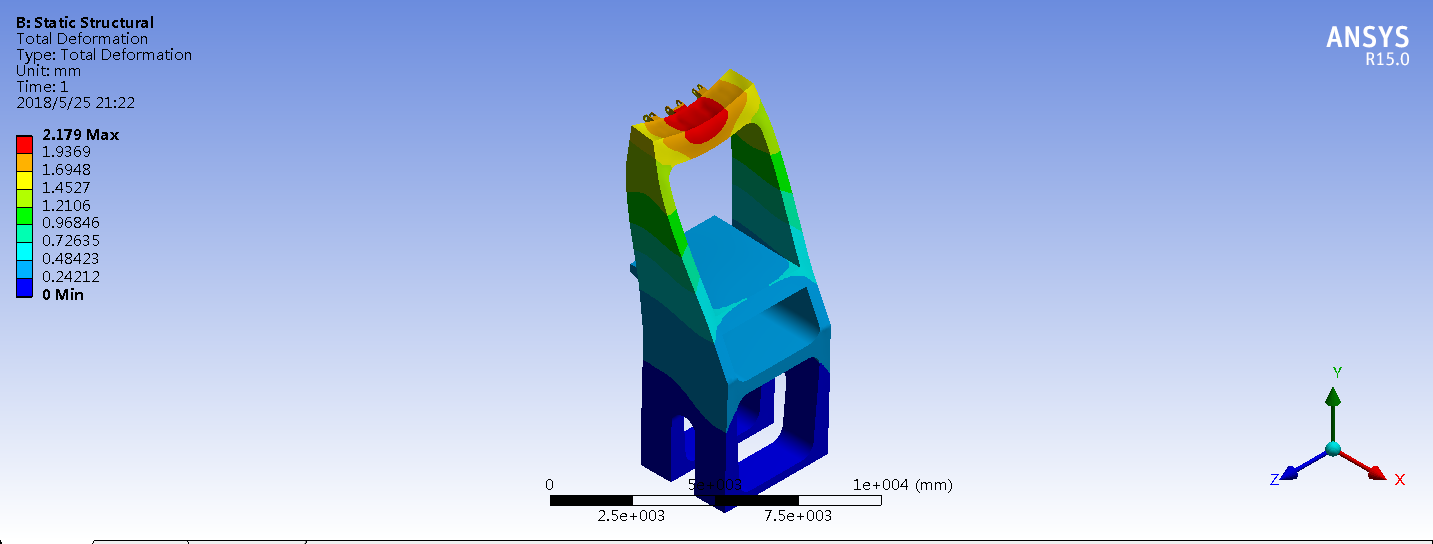
本文以MQ4040门座式起重机为例,主要介绍了MQ4040门座式起重机总体设计的过程,并对其人字架结构进行了设计计算,三维建模及有限元结构静力分析,得到人字架在不同工作幅度和不同受载情况下的变形等值线云图和应力等值线云图,为人字架结构优化设计提供理论依据。
关键词:门座式起重机;人字架;总体设计;三维建模;有限元分析。
Abstract
Taking the MQ4040 gantry crane as an example, this paper mainly introduces the overall design process of the MQ4040 gantry crane, and carries out the design and calculation of its human character frame structure, three-dimensional modeling and the static analysis of the finite element structure, and obtains the deformation equivalents and stress equivalents of the human character frame under different working amplitude and different loading conditions. The line cloud chart provides a theoretical basis for the optimization design of the miter stand structure.
Key words: gantry crane;gantry crane overall design;3D modeling;finite element analysis.
目录
第一章 绪论 1
1.1门座式起重机的简述 1
1.2门座式起重机的分类 1
1.3门座起重机国内外发展现状 1
1.3.1国内发展现状 1
1.3.2国外发展现状 2
1.4起重机人字架的研究发展现状 2
1.5选题意义 3
第二章 总体设计 4
2.1性能参数 4
2.2 组合式四连杆臂架结构尺寸确定 4
2.3货物水平位移补偿系统校验 5
2.3.1 货物水平位移补偿系统原理 5
2.3.2货物水平位移补偿系统的校验 5
2.4杠杆活对重式臂架自重平衡系统设计 6
2.4.1 杠杆活对重平衡系统工作原理 6
2.4.2 臂架自重平衡系统校验 6
2.5载荷的计算 7
2.5.1自重载荷 7
2.5.2起升载荷 7
2.5.3运行冲击载荷 11
2.5.4惯性载荷 12
2.5.5物品偏摆载荷 13
2.5.6风载荷 13
2.6轮压计算 19
2.7整机抗倾覆稳定性计算 21
2.7.1无风静载工况 21
2.7.2有风动载工况 22
2.7.3最大风载荷稳定性校核 23
2.7.4突然卸载稳定性校核 23
2.8车挡冲击力的计算 24
2.9防风制动能力计算 24
2.10非工作状态防风锚定力计算 25
第三章 人字架结构设计计算 26
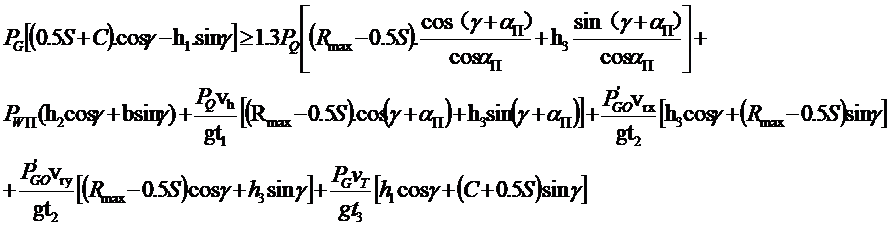
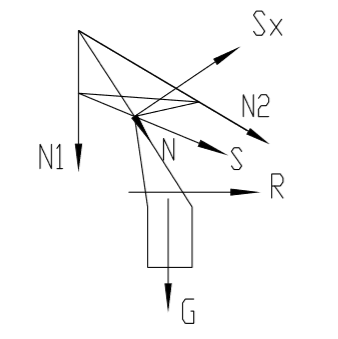
3.1人字架载荷计算 26
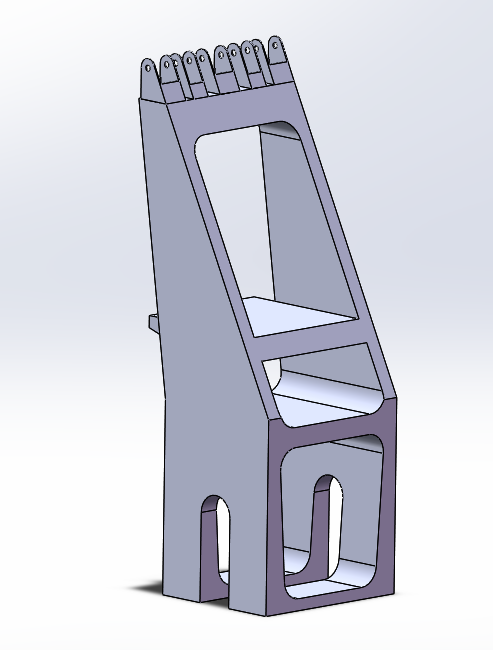
3.2人字架模型建立 27
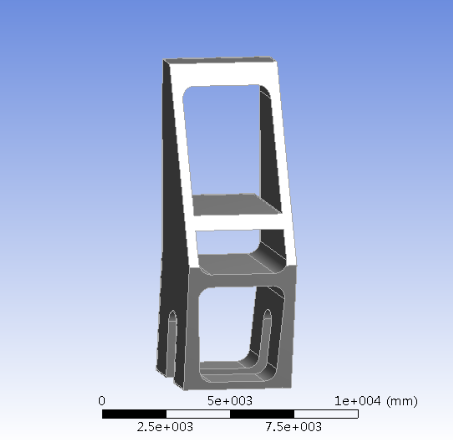
3.3人字架有限元分析 28
第四章 经济性与环保性分析 32
4.1经济性分析 32
4.2 环保性分析 32
第五章 总结与展望 33
5.1总结 33
5.2展望 33
参考文献 34
致谢 35
第一章 绪论
1.1门座式起重机的简述
门座起重机是指臂架被安装在门座上,下方可通过铁路或公路车辆的移动式回转起重机。 它是应用最为广泛的回转型有轨式起重机,也是港口起重设备的主力军。港口上常用的门座式起重机机型有:带斗门座式起重机、通用门座式起重机、多用途门座式起重机[1]。
门座式起重机的构造可以分为两大部分,上部的回转部分和下部的行走部分。上部回转部分安装在一个高大的门架上,并可以相对于行走部分可实现360°任意回转,包括起重机臂架系统、转台、立柱平衡系统、司机室、机器房等,此外回转部分上还装有起升机构、回转机构和变幅机构[2]。通过起升、回转、变幅机构的3种运动的组合来实现货物的装卸和搬运。下部的行走部分主要由门架和运行机构组成,门架为了能够让大型车辆通过,必须要有足够的净空高度。运行机构安装在门架底部,可以使整台起重机沿着地面上轨道行走。为防止起重机在工作状态或非工作状态因风载荷作用而发生滑行[3],在运行部分应安装有抗风防滑装置——夹轨器。
1.2门座式起重机的分类
由于臂架系统结构类型不同,门座式起重机又分为四连杆组合臂架式门座式起重机和单臂架式门座式起重机两种[5]。四连杆组合臂架门座起重机的最大优点是臂架下方的净高度比较大,所以在一定的起升高度要求下,起重机总体高度比较低,但结构比较复杂,重量比较大,单臂架门座式起重机则与之相反。本次设计的机型就是四连杆组合臂架门座式起重机。
1.3门座起重机国内外发展现状
1.3.1国内发展现状
随着我国港口物流和重型工业的发展,起重机的制造水平有了显著的提升,起重机的数量也在急剧上升,具备有独自生产制造起重机械能力和资质的单位也越来越多,已经有超过一千六百多家单位获得国家质检总局颁布的起重机制造许可证[3],具有非常强大的起重机生产制造能力,尤其是在港口起重机的生产制造方面,我国已经领先于国外水平。
目前,上海振华重工有限公司、三一重工股份有限公司、河南卫华集团等企业,代表了国内起重机械最高的生产制造水平,这其中,上海振华重工可以称得上是我国乃至世界上生产港口机械的佼佼者。上海振华重工成立只有不到16年的时间,但公司规模已由1992年刚成立时的十几人,发展成了一支近四万人的庞大的港口起重机械制造队伍,其主要生产大型集装箱机械和散货装卸机械, 制造水平已经可以满足现代化自动化港口建设发展的需要,并且国外很多港口开始订购振华重工设计制造的港口起重设备进行作业,很多创新技术也已在国际市场上处于领先的地位。
1.3.2国外发展现状
国外目前有许多起重机设计制造的大型公司,其中具有代表性的生产厂家有美国的马尼托瓦克、日本的神户制钢所、欧盟的特雷克斯—德马格和利勃海尔等[4]。他们拥有先进的设计制造技术,产品质量在稳定性和可靠性上都有不俗的表现, 并且研发的起重机形式多样,产品型号完善,能够满足不同港口的需求,在国际市场上具有很高的占有率。
在门座式起重机设计技术方面,欧美公司拥代表国际最高水平的设计技术和经验,所研发制造的门座起重机在国际市场上早已深受欢迎[5]。其产品不仅能满足大吨位的需要的同时,也拥有独特的结构设计方法,具备很高的安全性和稳定性。
日本厂家所研发的门座式起重机虽然在创新技术上还比不过欧美国家,但其产品对制造工艺的精细化程度的要求高,产品的稳定性也比较好,这也成为其占据国际市场的一大优势,这些优点也是值得我国起重机械生产厂家的学习和效仿。
1.4起重机人字架的研究发展现状
人字架与转台、转柱构成了门座式起重机臂架系统和平衡系统的支承结构[6],作为门座式起重机中非常重要的组成部分之一,在不降低设备零部件强度的前提下,为了减少制造成本,防止设备发生危险,使得对人字架的研究越来越重要[7,8]。人字架的目前的整体趋势是向着轻量化的方向发展,上个世纪五十年代后,起重机的轻量化技术有了飞速的发展,并且获得了众多宝贵的科研成果。
起重机轻量化技术的研究出现于上世纪七八十年代,随着近几十年的发展,国外起重机轻量化的技术取得了长足的进步。在不减轻人字架性能强度的情况下对其进行轻量化的设计,避免了不必要的浪费,与现在流行的的低碳环保的理念不谋而合。回顾各国对起重机机构轻量化技术的研究,起步比较早的国家是德国,而美国、法国、荷兰等国家以及我国也很重视起重设备的轻量化研究[9]。随着全球一体化程度越来越高,国外起重机逐渐打开了我国起重机械市场的,市场占有率逐年增加,尤其是国外进行轻量化设计的起重机在国内打下了良好的市场。所以,打破外国技术垄断,发展我国自主品牌的轻量化起重设备是当务之急[10,11]。
1.5选题意义
起重机自动化程度和生产的规模越来越大,人们对门座式起重机的工作性能要求也越来越高,不仅要求门座式起重机在工作时安全稳定、能适应不同情况下的作业环境,还要求起重机具有良好的经济性, 在任何作业环境下都具有较高的工作效率及稳定性[12]。为保证起重机安全稳定性及较低生产成本、 外观协调的要求,门座式起重机总体设计需要更高的要求。同时,人字架作为门座式起重机的重要结构之一,承载了货物自重、臂架系统的重力以及活配重的杠杆力[13]。人字架结构的安全稳定性决定了门座式起重机能否安全可靠的工作。因此,对人字架结构的设计计算和力学分析就显得尤为重要。
第二章 总体设计
2.1性能参数
起重机的性能参数代表了起重机的作业能力,是设计起重机的主要依据[14],起重机的性能参数包括:起重量、起升高度(下降深度)、工作速度、轨距、轮压、工作级别等。本次设计的MQ4040四连杆门座式起重机的主要性能参数见表2.1
表2.1起重机主要性能参数表
项目名称 | 性能参数 | ||
起重量 | 40t | ||
工作幅度 | 最大幅度 | 40m | |
最小幅度 | 12m | ||
起升高度 | 轨上 | 吊钩 | 抓斗 |
30m | 22m | ||
轨下 | 17m | ||
工作速度 | 起升机构 | 60m/min | |
变幅机构 | 45m/min | ||
回转机构 | 1.2 r/min | ||
行走机构 | 26m/min | ||
工作级别 | 整机 | A8 | |
起升机构 | M7 | ||
变幅机构 | M7 | ||
回转机构 | M7 | ||
行走机构 | M5 | ||
货物的偏摆角 | 臂架摆动平面 | αⅠ=3;αⅡ=10 | |
垂直于臂架摆动平面 | αⅠ=4;αⅡ=12 | ||
轨距基距 | 10.5m12m | ||
2.2 组合式四连杆臂架结构尺寸确定
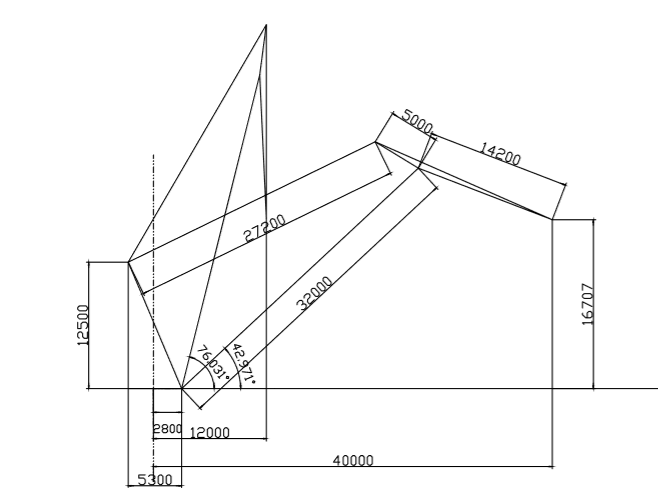
图 2.1 组合臂架系统尺寸
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: