侦查机器球的设计与开发毕业论文
2020-04-08 13:28:36
摘 要
随着机器人行业近几年迅速的发展,球形机器人作为行走机器人中的一个重要分支,在最近十年中的发展迅猛,相应的球形机器人的结构设计也越来越新颖。本文以已有的球形机器人的结构为基础,在结构合理的情况下提出一个全新的侦察球形机器人的机械结构。
本文在机械设计基础的理论上,运用三维建模软件PROE建立侦察球形机器人的三维立体模型。通过建立的三维模型,反过来校核侦察球形机器人的机械结构是否出现干涉现象,同时确定重要机械零件的尺寸。运用CAD技术,对侦察球形机器人的二维模型进行优化,降低加工成本和加工难度。结合ADAMS虚拟样机软件,根据简化的侦察球形机器人的三维立体模型,建立运动学和动力学模型,求解所建立的侦察球形机器人机械结构在理想驱动下所得到的运动情况和相应的动力状态。
最终,根据仿真结果,从运动特征和动力特征两方面来看,本文提出的侦察球形机器人的机械结构能够实现预定的侦察功能。
关键词:球形机器人;虚拟样机;运动学和动力学模型
Abstract
With the rapid development of the robotics industry in recent years, spherical robots, as an important branch of walking robots, have developed rapidly in the last decade, and the corresponding structural design of spherical robots has become more and more novel. Based on the existing structure of the spherical robot, this paper proposes a new reconnaissance spherical robot mechanical structure with reasonable structure.
Based on the theory of mechanical design, this paper uses three-dimensional modeling software PROE to establish a three-dimensional model of a reconnaissance spherical robot. Through the establishment of a three-dimensional model, in turn check whether the mechanical structure of the reconnaissance spherical robot has an interference phenomenon and determine the size of important mechanical parts at the same time. Using CAD technology, the two-dimensional model of the reconnaissance spherical robot is optimized to reduce processing costs and processing difficulties. Based on the simplified ADAMS virtual prototype software, a kinematics and dynamics model was established based on the simplified three-dimensional model of the reconnaissance spherical robot, and the movement conditions and corresponding dynamic states of the reconnaissance spherical robot mechanical structure under ideal driving were solved.
Finally, according to the simulation results, the mechanical structure of the reconnaissance spherical robot proposed in this paper can achieve the predetermined reconnaissance function from the aspects of motion characteristics and dynamic characteristics.
Keywords: spherical robot; virtual prototype; kinematics and dynamics model
目 录
第一章 绪论 1
1.1 引言 1
1.2 国内外研究前沿 1
1.2.1 重心偏移 2
1.2.2 外壳变形 4
1.2.3 角动量变形 4
1.2.4 其他驱动方式 5
1.3 研究的主要内容 6
第二章 结构设计 7
2.1 设计流程 7
2.2 总体设计 7
2.3 行走机构设计 8
2.3.1 齿轮材料选择 9
2.3.2 初定参数 9
2.3.3 主要参数选择 9
2.4 开合机构设计 11
2.4.1 螺旋副 11
2.4.2 轴 12
2.4.3 轴承与其他 13
2.5螺纹连接和平衡设计 14
2.5.1 螺纹连接 14
2.5.2 球壳和整体重心 15
2.6 电机计算选型 16
第三章 侦察球形机器人的动力学模型 21
3.1 水平面运动的动力学模型 21
3.2 坡面运动的动力学模型 22
第四章 仿真校核 24
4.1 ADAMS运动仿真 24
4.2 ADAMS动力仿真 26
第五章 结论 27
5.1 经济性与环保性分析 27
5.2 展望 27
参考文献 28
致 谢 30
第一章 绪论
1.1 引言
本次毕业设计的题目是侦查机器球的设计与开发。为了实现侦察球形机器人的侦察功能,本设计决定参考球形机器人的机械结构。球形机器人的外壳为球形,它采用滚动方式行走。这种机器人最早出现在二十世纪的九十年代,经过了将近二十年的发展,目前,它已经成为了移动机器人领域的一个十分有意义的研究分支。
对比其它的可移动机器人,在机械结构和运动机理方面,球形机器人有着各种独特的优势,这使得球形机器人在生活娱乐、军事和工业等方面具有十分广泛的应用前景。较理想的全向驱动对于球形机器人来说较容易实现;球形机器人的所有控制和驱动结构都包含在球壳内部,从而可以适应极端恶劣环境;球形机器人具有杰出的承载能力;球形机器人的外部为完整的球形壳体,在球形机器人行走的过程中球体不会出现翻仰的情况;球形机器人的驱动力由它的外壳和地面之间的摩擦力来提供,对比小车的运动,球形机器人不带有被动摩擦轮,这使得其运动效率高;球形机器人所需的驱动数目可以比所理想的自由度数目少,它的运动系统是非完整系统。
1.2 国内外研究前沿
目前,世界范围内,球形机器人已经开始在水下实验,儿童发展研究,安全侦察,航天探测,军事等方面有所成就。目前,多种控制方法可以用在球形机器人上,并且球形机器人具有多种用途。大多数类型的主动驱动设计基于三个主要原则:重心偏移,外壳变形或角动量守恒。
重心偏移在球形机器人中是指移动机器人质心(重心)以产生期望的运动。假设机器人球体处于平衡状态,随着其内部机构的移动,球的质量分布将会移动,导致球滚到一个新的平衡位置。通过适当的时间和控制方法,机器人可以在其环境中平稳移动。然而,这种方法的主要限制是最大输出转矩受到限制,因为重心不能移到壳外。
虽然不如重心偏移设计那么普遍,但是壳变形也是一种推动球形机器人的新方法。这种机器人不是用一个复杂的内部机电一体化系统来推动球体,而是依靠外部机构的转换来推动球体。这个机器人系列被证明可能比重心偏移类型的系统更通用。然而,与上面讨论的设计相比,这个概念还处于起步阶段,有待进一步研究。
角动量守恒系列的机器人通过快速旋转大飞轮并围绕轴旋转,来控制球的运动。内部机构的输出转矩通过这种方法来和控制力矩陀螺仪的角速度相关联。随着球形机器人内部控制力矩陀螺仪的角速度增加,输出转矩也增加。
1.2.1 重心偏移
芬兰的Helsinki University of Technology的Halme等人在1996年设计制作了第一个球形机器人[1]。这种机器人(IDU球形机器人)的驱动单元在球壳内部。通过内部小车的重量,球形机器人有足够的力矩来推动机器人实现移动。虽然这个设计的成本相对较低,但球形机器人在高速度运行时,基于IDU的机器人的航向难以控制。
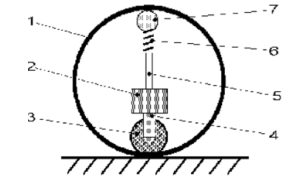
图1.1 IDU球形机器人原理图
意大利比萨大学的卡希亚 、康迪塞利和比基于1997年设计研制了一种球形车[2]。该机器人的球壳的运动和小车一样并不是全向运动,必须通过改变内部机器人的航向来改变行驶方向。不同于单轮车辆,四轮差速驱动小车可以帮助球形机器人实现不同的运动轨迹。四轮驱动系统可以充当差速驱动器,赋予球形机器人转向的能力,从而增加了机器人的全向性。
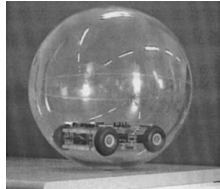
图1.2 球形车
巴塔查亚等人在2000年相互配合设计制作了一种驱动机械装置。球形机器人壳体的内部固定有两个转子,通过两个电机控制两个转子的相对运动,从而实现球形机器人直线行走和转弯这两个动作。
伊朗的Javadi和Mojabi在2002年共同设计研制了一个球形机器人,名叫August[3]。四个质量块和四个相匹配的传动螺杆组成了球形机器人August的驱动系统。质量块的位置由驱动电机改变,从而球形机器人得到一个偏心力矩,球形机器人实现前进和转弯的动作。

图1.3 August结构图
瑞典的Rotundus公司在2004年设计研制了一种名为GroundBot的行走机器人,这种球形机器人主要用来安全巡逻。该机器人可以被用来探测入侵者,并且迅速报告给使用者。这种机器人可以适用于雪地,沙漠,丘陵等地貌。目前,GroundBot已经商业化。
加拿大的魁北克省舍布鲁克大学的米肖等学者在2005年共同设计研制了球形机器人Roball[4]。在儿童教育领域,Roball有良好的应用前景,它的大致驱动原理是通过电机驱动改变长轴位置状态,改变球形机器人的重心从而实现球形机器人的驱动。
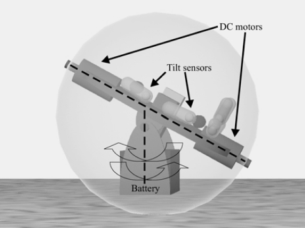
图1.4 Roball转向机构的后视图
上海交通大学的杨汝清教授在2001年设计制作了一种同步带轮内部驱动式球形机器人SMR。SMR采取了双电机驱动的形式[5],其中一个电机作为驱动电机来提供驱动动力,另外一个电机作为转向电机来提供转向力矩。
北京航天航空大学的战强教授领导的课题组设计研制了一种球形机器人BHQ-1[6]。该机器人通过改变配重的位置来改变球形机器人整体的重心位置,从而实现球形机器人的直线运动和转弯运动。
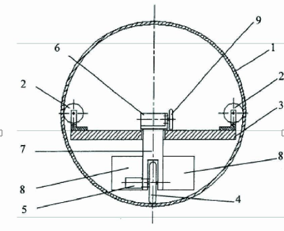
图1.5 北航战强球形机器人结构图
1.2.2 外壳变形
M. Artusi提出了一种球面变形漫游器[7]。这种机器人的外壳由四个介电弹性体致动器组成,可以通过施加电场来改变重心位置。按顺序转换电场状态会使得机器人滚动。K. Wait提出了一个类似的,但更先进的想法,利用加压气囊来改变整体重心。机器人与足球非常相似,外部球体的每个五角形部分都可以膨胀和放气。
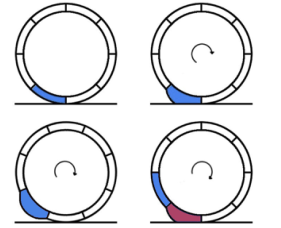
图1.6 足球型机器人运动
T. Yamanaka提出了一种有“超级球”特性的球形机器人。超级球由于其自旋和弹性特性而具有独特的弹跳方式。通过操纵外壳并将转子放置在内部结构中,机器人能够实现跳跃。
1.2.3 角动量变形
日本神户大学的toshiaki otani提出了三自由度陀螺仪驱动球形机器人。该机器人通过快速旋转陀螺仪,由于角动量守恒定律,球形机器人得以被控制。使用这种方法将内部机构的输出转矩与陀螺仪的角速度相关联,随着陀螺仪的角速度增加,输出转矩也增加。这是获得大于重心偏置型系统产生的输出转矩的一种新型方法。
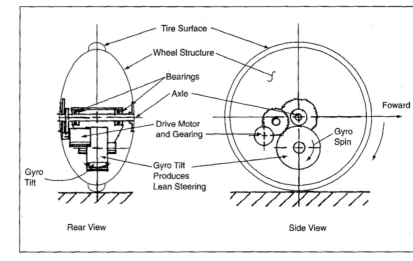
图1.7 陀螺仪的剖视图
V.Joshi提出了一种由两对直径相反的CMG控制的机器人。单个马达控制器控制单个CMG。随着角速度的增加,壳体将以相反方向旋转,以保持系统的总角动量。这种类型的机器人的状态步长计算比简单的重心偏移设计复杂得多,但是可以更加符合实际[8]。。
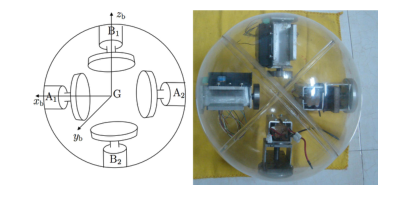
图1.8 Joshi的直径相反的转子对设计
1.2.4 其他驱动方式
2003年,美国国家航天航空管理局(NASA)极具创意的提出一种具有新型驱动方式的球形机器人来用于火星勘测,这个机器人被命名为Wind Spheres[9]。该机器人运用风力驱动,设计思想来源于蒲公英,极具创新,但是它对于火星的环境较适应,但是在其它环境中不具实用性。
在日本的横滨所举办的人类伙伴型机器人博览会上,日本Sony 提出了Q.taro球太郎球形机器人,该机器人直径170mm,,主要用于家庭环境。

图1.9 Q.taro球太郎球形机器人
以色列光学公司设计制作了一种大小如同网球,重量仅0.57公斤的球形机器人名叫眼球(eye ball)。麦克风、运动探测器、照明灯、相机、声音记录器、电池、无线电发射机等部件安装在眼球的内部[10]。球形机器人的外面包有三层橡胶保护球形机器人大内部结构不受破坏,因此它相当坚固和结实,从两层楼抛下或者被掷向混凝土墙面的时候也不会被损坏。
北曼谷先皇技术大学N.chadil提出了可配置机器人,是一个典型可变形球形机器人。它可以从一个球形状态变成一个双腿半球形的平台形态,它具有三条腿和全向轮,设计者旨在将该设计运用于运输和开发。
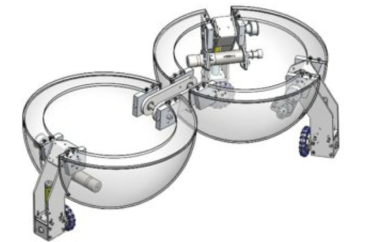
图1.10 重新配置后球形机器人的图像
1.3 研究的主要内容
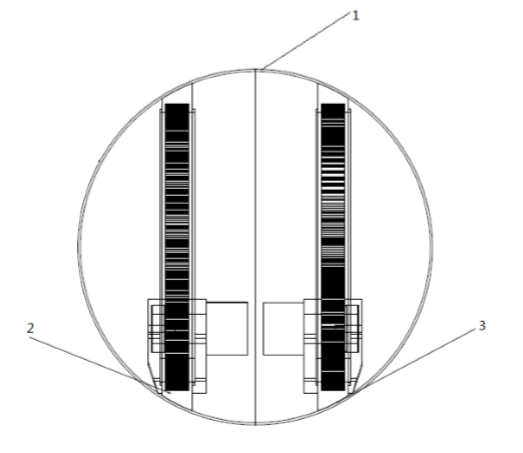
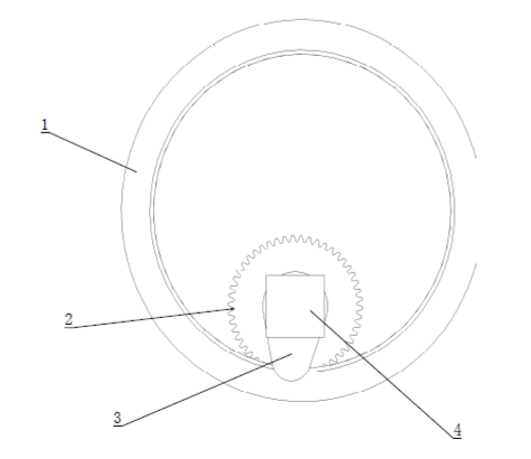
本文主要描述了一种侦察球形机器人的机械结构设计过程,主要包括侦察球形机器人的整体设计、行走机构、开合机构、电机选型和建模仿真。本设计仿照仓鼠球的原理,采用两对内啮合齿轮来改变重心的位置使得球形机器人发生位置变化的驱动结构来实现直线行走和转弯的能力,同时通过不对称开合的方式来更好的实现侦察球的侦察功能。除此之外,还要考虑这种球形侦察机器人带有侦察用的摄像头和一些必要的传感器设备,应该在结构设计的时候留出足够空间。
本文采取了PROE三维建模软件来建立侦察球形机器人的三维立体模型。将PROE中所建立好的三维立体模型转换为相应的格式导入到ADAMS运动仿真软件中去查看该模型的理想的运动情况和相应的动力状态。最后根据仿真结果,分析本设计的侦察球形机器人的机械结构可行性。
第二章 结构设计
2.1 设计流程
在本次设计中,球形机器人的驱动形式是首先需要考虑的问题。在了解本设计所应用的场合和尺寸大小要求后,对侦察球形机器人进行机械结构设计。通过对比不同的侦察机器人的结构方案,最后确定侦察球形机器人的机械结构,在进行结构设计的时候,可以参考相似结构和相似功能的设计,借鉴前人的设计经验。
侦察球形机器人进行机械结构设计的流程具体如下:
1、全面分析本设计产品所应用的场合和尺寸大小,对比现在广泛使用的不同的驱动方式,选择好合适的。
2、分析球形机器人主要包括的机构:开合机构,行走机构和外壳。从行走机构开始,提出不同的机械结构形式,比较运行效率、结构轻便性、结构稳定性等方面确定机械结构。
3、根据所选的机械结构,根据整体尺寸要求,确定行走机构的主要零件的尺寸。
4、确定开合机构的结构形式,根据所需的开合尺寸的要求,从而确定开合机构的主要零件尺寸大小。
5、根据上面所设计出的开合机构和行走机构,最终确定球星侦察机器人的球壳尺寸。
6、由上面设计出的各个机构的尺寸,决定整个结构的螺纹连接情况。
7、通过ADAMS仿真软件,校定机械结构的功能是否能够实现。
2.2 总体设计
球形机器人主要包括开合机构,行走机构和外壳。
目前,多种控制方法可以用在球形机器人上,并且球形机器人具有多种用途。大多数类型的主动驱动设计基于三个主要原则。由上章所述的三个原则,比较这三种方法的优缺点,基于重心偏移的设计复杂度最低,可以比较容易控制,同时在国内广泛采用,故本设计拟采用重心偏移原则实现侦察球的运动 控制。
本设计的球形机器人采用改变重心的方法,给球形机器人一个倾覆力矩,实现球形机器人的直线运动和转向。改变重心的方式有多种,以下提出三种可能的方案。
方案一:采用相互正交的配重小块。
该结构由一个穿过机器人外壳中心的固定轴和两个相互正交的配重组成。两个配重围绕各自的轴旋转,从而将球体的重心偏离几何中心,壳体开始滚动。

图2.1 采用相互正交配重的结构概念图
这种设计的一个缺点是,壳体的运动不具全向性:运动性能会被球形机器人的转弯的半径而影响。同时,像所有其他重心偏移设计一样,质心不能移到壳体的边界之外。随着壳体的半径变大和配重的加大,输出转矩也要相应的增加。然而,随着这些物体体积变大,他们相应的质量增加,移动它们所需的能量也变得更大。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: