多关节仿生机器鱼尾鳍设计及运动控制机理研究开题报告
2020-02-19 22:35:13
1. 研究目的与意义(文献综述)
1. 1.研究目的
近些年来,随着科学技术日新月异的发展,人类在资源开发的视线也从内陆转移到了海洋上面。海洋中蕴藏着丰富的矿物资源以及生物资源,但是人类对于其的了解不过冰山一角,因此一场席卷全球的针对海洋资源的科技革命已经揭开帷幕[1]。面对这场一定要打的科技革命,国内自行研发的海洋勘探设备“蛟龙号”正代表着我们要打赢这场革命的决心。不仅于此,随着科技的发展,一批又一批的优秀的水下机器人不停地涌现出来。
正因为这样,鱼类作为在海洋中处于领先地位的生物,在自然进化的历程中,获得了最有利于生存的本领:不但能通过尾鳍的摆动形成向前游动时的推进力,还可充分利用身体周围的流体动能,从而实现较高的游动速度和游动效率。而其对身体各部分优秀的协调控制能力更使其能够实现小于0.3BL(Body Length,BL)的转弯半径和低噪声的游动运动[32]。仿生机器鱼作为水下机器人的一种,受到大批学者的高度关注。仿生机器鱼作为一种结合了鱼类推进模式和机器人技术的新型水下机器人,拥有着与普通水下机器人相比独特的优势[2]:推进效率高,运动能力强,机动性能好;流体性能优良;体积小、重量轻、隐蔽性强。由于仿生机器鱼的这些优点,其将会在以下领域得到广泛应用:
-
在民事方面,仿生机器鱼可用于水质监测,污染源跟踪,海洋生物追踪观察等;
-
在军事方面,仿生机器鱼由于良好的隐蔽性可使其作为水下侦察装置或攻击性武器;
-
在海洋资源开发方面,由于仿生机器鱼在游动的方式和外形上皆与鱼类相似,在人类开发海洋资源和研究海洋资源的同时可有效降低人类活动对海洋生态环境造成的破坏;
-
在娱乐方面,随着机器人技术的创新以及成本的降低,仿生机器鱼可以在游泳池、水族馆等地方供人学习和观赏。
2. 2.研究背景与现状
2.1 研究背景
2.1.1 鱼类推进方式分类及比较
对鱼类的研究最早开始于对鱼类游动的观察和记录,包括运动的速度,方式和身体姿态等等,并由此获得了各种各样的鱼类运动学和身体参数等的数据。在1978年,Beamish将鱼类游动分为三种:持续(sustained,大于200分钟);间歇(prolonged,20秒至200分钟之间)和爆发(burst小于20秒)。现在一般将鱼类游动简单划分为巡游和机动两种运动方式:前者指鱼类向前的匀速运动,属于定常运动;而后者指鱼类在1秒内的快速运动,包括运动中的加速和减速、倒游和转向等,属于非定常运动。巡游是鱼类在较长距离游动中的运动方式,而机动则是鱼类在捕食或逃逸中常见的运动方式。
从生物学角度,鱼类依照其体型及功能的不同,有以下几个常见的基本推进运动方式:喷射式、身体波动式、BCF推动式和MPF推动式等[3]。
(1)喷射式:代表生物为水母、乌贼、鱿鱼等。这种推进方式的原理就是利用了动量守恒原理,依靠水的反作用力,在游动过程中,这些生物依靠身体的特定部位间歇性地向身体后方喷射水流,因此产生推进力驱动本体前进[4]。如图2-1-1所示为乌贼在水下的喷水推进。虽然这种游动方式大多出现在鱼类躲避天敌或自然灾害的场景中,但其还是有一定研究意义的。哈尔滨工业大学的李健[5]就对于仿生乌贼推进器作出了研究,将水平鳍的摆动与乌贼喷水的推进作用相结合,在尾部产生涡环从而推动前进。
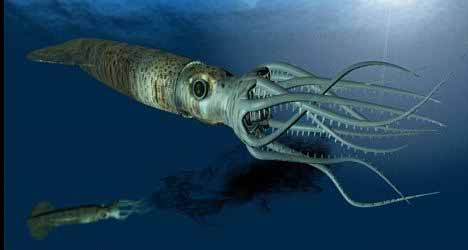
图 2-1-1:乌贼喷射式推进示意图
(2)身体波动式:也就是所说的鳗行式(anguilliform),如鳗鱼、水蛇等。它们的游动犹如正弦波形的前进一样,整个推进结构都参与了大幅度的波动,并且在推进长度上至少提供一个完整的波形,而且波幅基本不变,因此其前进单位距离所需能量最少。
(3)BCF(body and/orcaudal fin)推进方式:也被称作尾鳍摆动式。BCF推进模式的推力主要来源于两个部分,一小部分来自尾鳍摆动过程中水流作用在为其表面的正压力在沿着鱼体的前进方向上的分力,而大部分来自于尾鳍摆动过程中形成的涡流产生推进力[6]。这里又可分鲹科式(carangiform mode)和鲉科式(thunniform mode)[7],鲹科式如鳟鱼、鲱鱼等是最常见的方式,在速度、加速度方面和可操控性上都有最好的表现。鲉科式,又称为鲹科结合新月形尾鳍模式该鱼类有鲉鱼、鲭鱼、马林鱼等,常有大展弦比的尾鳍,在快速运动中最为高效。它们的显著特点是主要利用鱼的身体后半段和尾鳍协调摆动前进。
(4)MPF(median and/orpaired fin)推进方式:它主要是利用除了尾鳍之外的一些鱼鳍向前划动产生推进力[8],如胸鳍(pectoral fins)、腹鳍(pelvic fins)、臀鳍(anal fin)、背鳍(dorsal fin)等。这类鱼较少,大多数的鱼类只是利用这些鳍来保持平衡和控制转向及提高巡游稳定性[9]。这种推进模式速度低推进效率差,但是其稳定性以及机动性良好,因此经常跟其他的推进模式一起结合起来使用。
在上述的几种推进模式中,鲹科推进模式(Thunniform)是效率最高,速度最快的推进模式,海洋中游速最快的鱼类基本都采用这种推进模式。该模式中推进运动限制在身体的后三分之一,仅通过尾部的运动就可以产生超过90%的推力;同时鱼体的形状和重量分布保证了身体前三分之二部分的横向移动和转艏极小[10-12]。在游动过程中,不同的展弦比,摆动幅度和频率的新月形尾鳍对该推进模式产生不同的影响[13]
2.1.2 仿生机器鱼尾鳍分类及设计
鲹科推进模式的机器鱼,在一个完整推进运动周期内,推进运动包含鱼体的波动和尾鳍的运动两部分。在鱼类运动时鱼体主干部分(前2/3身体部分)波幅很小,明显的波动主要集中在身体后1/3部分,鱼体波特征为一波幅逐渐加大,由头部至尾鳍传播的行波,如图2-2-1。在尾鳍与身体连接的狭窄区域(尾柄)达到最大值,特别明显的侧向位移仅仅发生在尾鳍及尾柄部分。在机器鱼游动过程中鱼体的头部不产生波动,但不是静止不动,而是做微小幅度的摆动,对推进运动起到平衡作用[14]。通过多次实验研究,我们发现,在鲹科模式鱼类游动过程中通过尾鳍的运动产生了几乎90%的推进力。因此,在研究仿生机器鱼过程中,可以将鱼体前三分之二部分看作是一个刚性的身体,这部分依靠一个狭长柔韧的区域和尾部连接,这个狭长的区域一般称为尾柄关节,其实也可以看作尾鳍的一部分。因而,仿生机器鱼研究工作中的关键问题就转移到了对尾鳍推进系统的研究上。
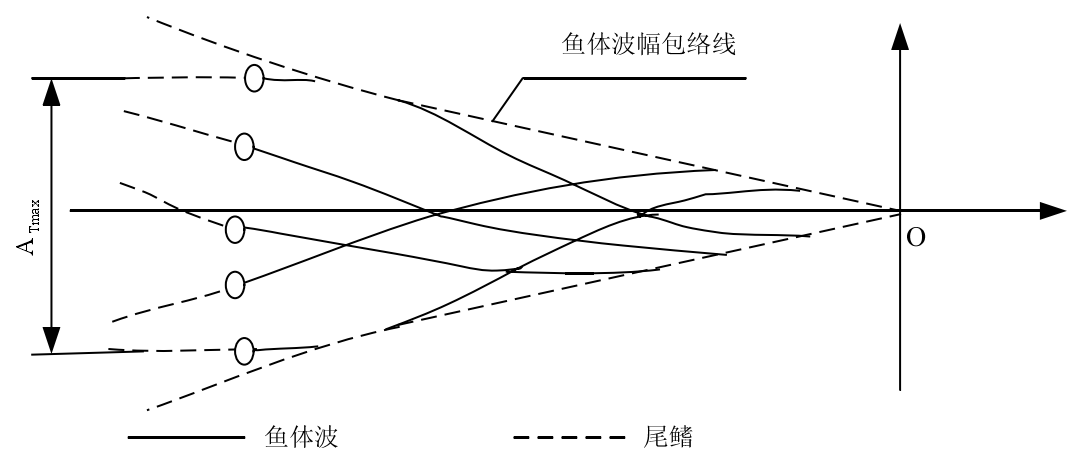 |
图 2-2-1:鱼体波及波幅包络线
2.1.2.1 仿生机器鱼尾鳍分类
图2-2-2:尾鳍形状
自然界鱼的种类数以千万计,尾鳍的形状也就各有不同,大致可以分为新月形,叉形,微凹形,圆形等几种形状(图2-2-2所示)。具有新月形尾鳍的鱼类有鲨鱼,金枪鱼等,此种鱼类在游动过程中身体动作很小,仅靠尾鳍的大幅度摆动来推进。叉形尾鳍的鱼类游速快且适合长时间巡游,如鲣鱼等,其尾鳍的特点就是尾鳍面积小,尾稍很尖,尾柄较细;微凹形尾鳍的鱼类如鳟鱼等,常见的鲤鱼也接近于凹形。圆形尾鳍的鱼类尾柄较粗大,且尾鳍面积大,类似扇形,诸如圆尾斗鱼,鳎鱼等,具有这种形状的鱼类大都游动速度缓慢,灵活性差。
选择合适的尾鳍形状对于之后的仿真计算是非常重要的。哈尔滨工程大学的张曦,苏玉民等人[15]使用水下实验的方法分析了仿金枪鱼,仿海豚,仿白鲸三种不同形状尾鳍的推进性能,总结得出的结论是仿金枪鱼的平均推力系数和输入功率系数最小,推进效率最高;中国科学技术大学的力学和机械工程系相关研究人员对不同形状的鲹科类尾鳍在一个小型循环水洞中进行了测力实验[16],实验证明新月形尾鳍的推进性能要优于其他尾形;浙江大学的流体工程研究所通过测力实验的方法研究了圆形,叉形,新月牙形三种典型的尾鳍系泊状态下的推进性能,实验数据表明具有大展弦比的刚性尾鳍即新月牙尾鳍在中高段摆动频率下能产生更大的推进力[17]。之前的研究中大多采用实验的方式证明了大展弦比的新月牙尾形具有更强的推进性能,所以本课题中选择新月形尾鳍作为研究对象。
2.1.2.2 影响尾鳍设计的参数
(1)尾鳍的形状参数。主要包括:尾鳍的面积S、展弦比L/C。根据实验可知,具有大展弦比的尾鳍产生的推进力也比较大。因此,很多研究者开始将仿生机器鱼的尾鳍做成新月形,以获得较大的推进力[18]。
(2)尾鳍平动—摆动运动相位差![]() 。尾鳍平动—摆动相位差主要通过影响尾鳍的击水角度,进而影响尾鳍的运动以及推进力的产生,如果取值不当会严重影响推进力的产生,甚至会产生阻力。
。尾鳍平动—摆动相位差主要通过影响尾鳍的击水角度,进而影响尾鳍的运动以及推进力的产生,如果取值不当会严重影响推进力的产生,甚至会产生阻力。
(3)尾鳍摆动频率。采用不同的摆动频率对推进力的影响很大,为了求得最优的游动效果。我们需要对尾鳍建立运动模型,通过仿真试验来研究尾鳍摆动频率与推进力的关系,设定最佳的参数值。
(4)尾鳍摆动运动幅值。鲹科推进模式的鱼类尾鳍的摆动产生主要的推进力,因此,不同的尾鳍摆动幅值会产生不同的推进力。需要通过大量的仿真试验结合实际设计的尾鳍模型,来设定尾鳍摆动运动的幅值,以获得最佳的推进效果。
2.1.3 仿生机器鱼流体力学分析及Fluent仿真
2.1.3.1 计算流体力学概述
流体力学是一门采用连续介质模型,研究流体的平衡和宏观运动规律以及流体与其所接触物体相互作用的学科。自牛顿定律提出至今,推动流体力学发展的三种研究方法可分为:理论研究法,实验分析法和数值计算法。前两者又被称为理论流体力学,实验流体力学,而第三种应用数值模拟来研究流体规律的方法就是计算流体力学(Computational fluid dynamics—CFD)。计算流体力学就是在计算机上通过求解流体力学方程,通过图像处理获得不同流动条件下流体表面的力,力矩,流速,形变,湍流程度等,它是一种集流体力学,计算机科学,高等数学为一体的多学科产物[19]。CFD计算结果对产品的概念设计、产品详细设计、产品问题查找与分析以及重新设计产品都有很大的帮助。
传统的理论流体力学方法首先要对流体环境及运动方式进行合理的简化和近似,创建合理的模型。然后才能根据物理定律,控制方程,并利用数学工具分析求解。实验流体力学方法尽管得出的实验结果较为可靠,但是往往要受到物体实际尺寸的限制和边界条件影响,因此具有较大的局限性。而CFD方法则可以解决以上两者无法处理的复杂流动情况,和实验方法相比所需经费和计算工时都比较少,而且设计周期短,通用性强,CFD分析能够得到流场中任意位置的任意物理量的值,便于问题的分析,所以计算流体力学已经成为流体力学的一个重要分支。这三种研究方法之间的密切联系决定了它们只有相互补充促进,相互验证方能更好地运用于现实问题,将这种研究理念与设计方法应用在航空航天,船舶,建筑甚至更为广阔的领域[20]。
2.1.3.2 Fluent软件介绍及有关机器鱼的Fluent仿真分析
FLUENT 程序在功能上主要用于模拟计算流体流动和热交换问题。它可以模拟具有复杂结构的流体流动,以及所提供的非结构网格生成程序对相对复杂的几何结构网格生成非常有效。FLUENT 支持多种网格划分方法,同时具有多种求解方法和多重网格加速收敛技术。总而言之,FLUENT 在现有的流体计算软件中可以算是非常理想的,其市场占有率多年来一直保持全球第一位。 在 FLUENT 的求解上,具体的计算过程可以分为三步:前处理,数值计算和后处理。
(1)前处理即为数值计算前所做的准备工作,大致包含建立几何模型(如三维绘图软件 UG,Solidworks 等导出分析对象的模型),然后在 ANSYS workbench 中创建模型的流体域和固体域,以及对创建好的计算区域进行网格划分,FLUENT 本身不具备网格划分功能,网格划分可以在ANSYS mesh模块、ICEM 或者GAMBIT中完成,最后一步便是定义各边界条件;
(2)数值计算则是通过离散的网格,构造逼近流动控制方程的近似离散方程,通过FLUENT软件读入前处理时生成的模型检查网格,根据所要解决的问题选择求解器为稳态还是瞬态,之后选择湍流模型,流体介质性质,设定模型边界条件,数值算法,离散格式,欠松弛因子等等,最后输入时间步长,设置迭代次数,初始化开始计算。
(3)后处理就是利用图形和可视化技术将计算得到的数据参数和流场状况通过云图,等值线图,矢量图等呈现出来,如果需要还可以生成折线图,图表等,最终目的就是通过合适的方式将我们需要的数据内容清晰客观的表达出来。
实际流体问题中很多情况下物体边界参与运动或变形的,比如鸟扇动翅膀飞行、鱼摆动鳍、尾巴游动、摆线泵的运动、内燃机中活塞和气门的运动、生物学领域动脉血管的膨胀与收缩等,这些都需要通过 FLUENT 中的动态格技术来模拟[21]。本研究课题中仿真模拟的对象是摆动鱼鳍,为瞬态问题,摆动过程中伴随着边界的运动,每一个时间步之间都是有联系的,且需要记录不同时刻的流场状况和涡流形态,因此就需要用动态网格技术来解决。 FLUENT 在进行动态网格计算时,体网格的更新是根据每个时间步内网格边界运动后的新位置来自动完成的,即 FLUENT 解算器可以根据网格边界的运动和变形自动地更新模型内部体网格节点的分布,用户在使用动态网格模块时,仅需要设置好初始网格并在模型中指定相关区域的运动即可。
在使用动态网格时,用户仅需提供初始模型网格并定义模型中相关区域的运动即可。FLUENT 允许用户通过边界 Profile 文件或 UDF(用户自定义函数)来指定区域的运动,前者只能给出运动过程中几个离散时刻的运动参量,运动的中间过程软件会按线性规律自动分配,这种方法适用于匀速或匀变速刚体运动。对于复杂的刚体运动规律或变形运动采用 UDF 会更加方便。UDF 程序是采用 C 语言编写的,用户在使用时需要手动加载到 FLUENT 中,然后FLUENT 对加载后的 UDF 进行编译。
近几年,基于流体力学的仿真分析有:2013年石河子大学机械电气工程学院的冯静安,晁贯良等人基于机器鱼的胸鳍几何模型,应用Gambit建立了机器鱼胸鳍二维网格模型,应用Fluent仿真,分析不同攻角下机器鱼升力阻力差[22];2015年南京理工大学机械工程学院的冯畅,黄晓华等人先通过二维流场仿真确定了机器鱼的壳体轮廓方程,在应用ICEM CFD建立了三维流场结构化网络模型,对椭圆加抛物线的线性回转体进行了FLUENT仿真[23];2018年合肥工业大学的尹昱康,张兵等利用CFX和matlab进行了二维摆动尾鳍推进性能的水动力仿真分析,并使用三次样条曲线拟合尾鳍摆动的振型函数优化机器鱼的推进性能[24]等。
2.1.4 仿生机器鱼控制系统
仿生机器鱼控制系统的硬件系统设计是控制系统设计的基础,如同机器鱼的神经系统,通过实时采集外界环境信息和自身运动状态数据,实现对机器鱼的控制[25]。合理的硬件设计可以充分发挥控制系统的功能,使得实时控制性能好,控制精度高,较好的完成控制任务。
谈及仿生机器鱼硬件系统的设计,首先就是要确定机器鱼的驱动方式。目前科学界比较常用的驱动方式有:电机驱动,是目前最常用的驱动方式。电机工作的基本原理是利用电机转子和定子之间电磁场的相互作用在电机输出轴上输出转矩,进而驱动与电机轴相连的机构。电机在机器鱼中的应用主要是通过电机的转动带动机器鱼的关节进行运动。通过协调多个不同电机之间的运动从而驱动机器鱼尾鳍的摆动,从而产生推进力;液压驱动,液压驱动装置主要是利用液体对压强的传递作用,产生较大的推力来推动关节运动;SMA驱动,SMA是形状记忆合金的英文缩写,是一种具有特殊性能的材料。当形状记忆合金遇热升温,其形状就会发生变化,而当其在逐渐冷却后,就会恢复到原来的形状;压电陶瓷驱动,压电陶瓷在电流通过时,会产生形变,随着电压的变化,压电陶瓷的形变与电压变化呈现正比例关系等等。考虑到条件以及时间的限制,本课题研究中采用电机驱动方式。
控制系统由供电单元、感知单元、控制单元和处理器四部分组成。供电单元对感知单元、控制单元和处理器提供电源。仿生机器鱼控制系统中的各种功能模块对电源的要求不同,由于感知单元主要由传感器组成,且传感器供电电源的好坏直接影响其采集数据的准确性,所以,感知单元对电源提出了较高的要求。同时,控制单元作为舵机驱动部分,也是整个控制系统中功率消耗最大的部分,所以供电单元必须能够为控制单元提供一定的电源;感知单元感知各种传感器数据,再通过总线把传感器数据传给处理器。在仿生机器鱼上安装各种类型的传感器,比如压力传感器、红外传感器和摄像头等,可以实现仿生机器鱼智能和自动化;处理器根据感知单元上传的数据,综合分析仿生机器鱼的运动状态、周围环境,在对这些数据处理以后做出相应的决策,最后向控制单元发送运动指令;控制单元的主要功能是通过接受处理器发送的控制参数,控制舵机的不同的运动实现仿生机器鱼的多种运动模态
2.2 国内外研究现状
由美国麻省理工学院于1994年研制成功的以金枪鱼为原型的机器鱼RoboTuna可以说是世界上第一条仿生机器鱼,该机器鱼是由2843个零件组成的机器金枪鱼,骨架为铝合金材质,身体装有6台2.21KW的直流伺服电动机,其推动效率达到了91%,全长约为1.2米。然后他们又相继研制出了RoboTuna二代以及VCUUV两种仿生机器鱼[26],其中VCUUV为仿黄鳍金枪鱼的机器鱼,采用循环液压驱动,尾鳍展长0.65米,驱动频率1HZ的时候获得最高速度0.5BL/s。
同样日本在仿生机器鱼方面的研究也是出于世界前列。日本运输省船舶技术研究NMRI,为研究鱼类最优推进方法相继开发了PPF系列、PF系列和UPF系列仿生机器鱼。其中PPF系列仿生机器鱼主要用来研究仿生鱼的机械结构,1998 年首先研制出PPF-01,该机器鱼由舵机驱动,采用双通道无线控制器控制,用来验证机器鱼的机械机构方面的可行性;PPF-05仿生机器鱼采用直流电动机驱动,它的传动装置将动力转化为机器鱼尾鳍的摆动,可实现高速游动;PPF-08i机器鱼通过伺服电动机控制,转弯性能十分优良,最小转弯直径只有 200 mm,最快推进速度 0.12 m/s。而之后他们相继研发的PF系列和UPF系列仿生机器鱼主要用来进行水下实验。
瑞士的BIRG课题组研制的boxyBot机器鱼,这种机器鱼可以完成直游、倒游、转弯等模态[27]。
相比较国外在仿生机器鱼方面的丰富研究,国内对其的研究起步稍晚一点。具有代表性的有2002年哈尔滨工程大学研制的模仿蓝鳍金枪鱼而设计的仿生机器鱼“仿生—I号”。该仿生鱼依靠一对辅助胸鳍和新月形尾鳍来游动。主要用来辅助打捞沉船,鱼长2.4米,最大直径0.62米,排水量高达320KG,可潜水10米深,于2003年11月在海上进行航行试验[28]。
还有哈尔滨工业大学的课题组研制的仿生机器鱼“HRF-1”,其游动速度达到0.5m/s,而且进行了升潜和转向实验[29];以及在这基础上研制的两关节鲹科仿生机器鱼“HRF-2”,相对于上一代机器鱼,其结构设计更合理,从而在推进速度和升潜速度上有了显著的提高[30]。
北京航空航天大学研制的SPC型仿生机器鱼、北京大学研制的仿锦鲤机器鱼以及兰州交通大学研发的一种构建于二自由度胸鳍推进的仿箱鲀机器鱼等等。
3. 3.本课题研究的意义
本次课题是“多关节仿生机器鱼尾鳍设计及运动控制机理研究”,主要研究方向是仿生机器鱼的多关节尾鳍的设计问题和运动控制系统的开发问题。所以本次论文主要设想是解决多关节尾鳍的参数设计,三维建模和流体力学仿真分析,从前人的经验上,获取进一步的尾鳍优化方案;同时完善多关节尾鳍的控制系统,最优方向是不仅解决运动控制的问题,更能在此基础上为机器鱼传感器环节提供控制。2. 研究的基本内容与方案
1. 1.本研究的基本内容
(1)了解鱼类游动机理:鱼类运动具有高效性,高机动性,良好的隐蔽性等特点。本研究将采用身体/尾鳍摆动产生推进力的bcf(body/caudal fin)模式。此外,还需要研究鱼类转弯游动的机理:当尾鳍摆动的中心线和鱼体的轴线重合时,鱼体向前游动;当尾鳍的摆动角度与鱼体轴线存在一个夹角时,鱼体会发生转弯[33]。
(2)仿生机器鱼的结构设计:结构设计需要完成对鱼体的设计,胸鳍、尾鳍的设计以及重心调节功能的设计,然后对其进行solidworks三维建模。本研究暂定为三个舵机实现对机器鱼尾鳍的运动控制。
(3)基于fluent的 cfd仿真分析:建立自主游动鱼体的流体力学模型是多关节仿生机器鱼设计的首要问题。通过模型的建立,可对机器鱼的运动参数进行仿真。机器鱼的运动模型主要描述机器鱼在空间中的运动情况。采用fluent软件对模型进行仿真分析,分析出模型各参数对于仿生鱼推进和转弯的影响。为便于建模、讨论与实验,需做出如下假设:
3. 研究计划与安排
2019.01---2019.03 利用proquest博硕士学位论文全文数据库(全文)等数据库阅读相关文献,并完成外文文献翻译工作;
2019.03---2019.04 设计仿生鱼基本骨架结构和运动机构,使用solidwork进行仿生鱼的外形设计以及内部结构,并使用fluent实现仿生鱼流体仿真分析;
2019.04---2019.05 实现仿生机器鱼尾鳍推进控制系统设计,以及仿生机器鱼的总体控制方案设计,调整机器鱼内部结构;
4. 参考文献(12篇以上)
[1]沈艳,郭兵.仿生机器鱼原理及应用[m].北京:中国工信出版集团,2017:1-2.
[2]朱嘉翔,王明艳.仿鲹科类机器鱼的研制与实验.机械研究与应用,2005,18(2):24-25.
[3]陈政宏. 浅谈流体中生物的推进方法http://www.sciscape.org/articles/fish-swim/index.html.



