MQ2538港口装卸四连杆门座式起重机圆筒门架结构CADCAE毕业论文
2020-02-19 19:26:45
摘 要
随着经济全球化的进程,我国对港口运输的需求也日益增长,门座式起重机作为港口专用的机械设备,具有效率高、成本低、灵活性好、通用性强等特点。如何科学、合理地设计门座式起重机结构,提高起重运输效率,成为了中外关注的焦点问题。
本文首先通过计算确定MQ2538门座式起重机的结构形式和尺寸参数,完成货物水平位移补偿系统以及臂架自重平衡系统的设计,并完成整机质量重心的统计、风载荷计算、整机抗倾覆稳定性校验以及轮压计算。在此基础上,计算出圆筒门架结构在不同工况下所受载荷,利用SolidWorks建立三维模型,导入Workbench中进行有限元分析,得出符合设计要求的圆筒门架结构式样。
关键词:门座式起重机;圆筒门架;有限元分析
Abstract
With the process of economic globalization, China's demand for port transportation is also growing. As a port dedicated mechanical equipment, portal crane has the characteristics of high efficiency, low cost, good flexibility and versatility. How to design portal crane structure scientifically and rationally and improve hoisting efficiency has become the focus of attention at home and abroad.
Firstly, the structure form and size parameters of MQ2538 portal crane are determined by calculation, the design of cargo horizontal displacement compensation system and boom self-weight balance system is completed, and the centroid of mass, wind load calculation, anti-overturning stability check and wheel pressure calculation of the whole machine are completed. On this basis, the loads of circular portal frame structure under different working conditions are calculated. SolidWorks is used to build a three-dimensional model, which is imported into Workbench for finite element analysis, and the structural pattern of circular portal frame which meets the design requirements is obtained.
Key words: portal crane, circular portal frame structure, finite element analysis
目录
摘要 1
Abstract 1
第一章 绪论 1
1.1目的及意义 1
1.2设计内容及方案 1
第二章 总体设计与计算 3
2.1主要技术参数 3
2.1.1额定起重量Q 3
2.1.2幅度R 3
2.1.3起升高度H和下降深度h 3
2.1.4轨距S 4
2.1.5基距B 4
2.1.6工作速度 4
2.1.7轮压P 4
2.1.8轨道型号 5
2.1.9工作级别 5
2.1.10风压 5
2.1.1 主要参数表 5
2.2臂架结构主要尺寸设计 6
2.2.1基本参数 6
2.2.2刚性四连杆组合臂架方案 6
2.2.3货物水平位移校验 8
2.3杠杆-活对重法杠杆自重平衡系统 10
2.3.1杠杆-活对重法杠杆自重平衡系统设计 10
2.3.2臂架平衡系统的校验 11
2.4整机重心位置计算 14
2.5风载荷和风力矩计算 15
2.5.1风载荷 15
2.5.2风载荷以及风力矩计算 16
2.6轮压和支承反力 17
2.6.1支承反力计算 17
2.6.2轮压计算 19
2.7抗倾覆稳定性计算 19
第三章 圆筒门架结构载荷计算 23
第四章 三维建模和有限元分析 25
4.1三维建模 25
4.1.1SolidWorks简介 25
4.1.2建立三维模型 25
4.2圆筒门架结构有限元分析 25
4.2.1 Workbench简介 25
4.2.2圆筒门架结构有限元分析 27
4.2.3本章小结 29
第五章 环保性及经济性分析 31
5.1环保性分析 31
5.2经济性分析 31
第六章 结论与展望 32
6.1结论 32
6.2展望 32
参考文献 33
致谢 34
第一章 绪论
1.1目的及意义
随着经济全球化的进程,我国对港口运输的需求也日益增长。目前的港口运输仍然以集装箱为主,因此起重机成为港口货物运输的重要工具。港口的工作任务繁重,而门座式起重机作为港口最常见的起重机之一,承包了港口大量的起吊、运输工作,如何科学、合理地设计门座式起重机结构,提高起重运输效率,成为了中外关注的焦点问题。
门座式起重机作为港口专用的机械设备,具有效率高、成本低、灵活性好、通用性强等特点。国外专业的门座式起重机生产厂家约有十余家,代表有德国的Liebherr(利勃海尔)、Terex-Demag(特雷克斯-德马格)、美国的Manitowoc(马尼托瓦克)和日本的KOBELCO(神钢)等。他们的特点和优势是产品型号较为完善,技术较为先进,具有很高的市场占有率。
我国在小吨位起重机的设计领域已经位于世界前列,但对于大型起重机的设计和研发,国内与国外还存在着不小的差距。在技术方面,我国对大型门座式起重机的设计和研发起步较晚,时间较短,在设计和研发的水平上均落后于国外,急需加快研究步伐,追赶上与国外的差距;在经验方面,无论是可靠性、稳定性还是经济性上,国内所生产出的门座式起重机均与国外的专业品牌有着显著的差距。通过对技术和经验方面的研究,我国很有希望在未来的十至二十内不断缩小与国外门座式起重机在设计和研发上差距。
本次设计旨在利用CAD、SolidWorks、ANSYS等软件,根据受力状况、疲劳寿命计算与实际工作需求设计出符合条件的MQ2538门座式起重机圆筒门架结构,并实现在一定程度上的结构优化,提高起重效率。同时培养同学们对本科所学知识融会贯通、熟练运用CAD、SolidWorks、ANSYS以及Excel等软件的能力。
1.2设计内容及方案
本次设计主要分为两部分:
(1).完成MQ2538门座式起重机的整体设计:确定MQ2538港口装卸四连杆门座式起重机总体结构型式及主尺寸,完成货物水平位移补偿系统及臂架自重平衡系统的设计,并完成整机质量重心的统计、风载荷计算、轮压计算以及整机抗倾覆稳定性校验;
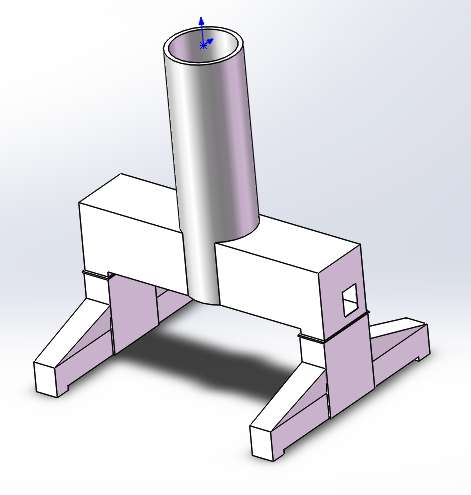
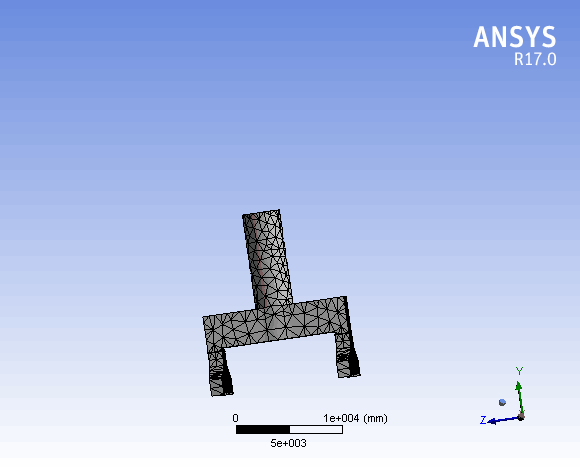
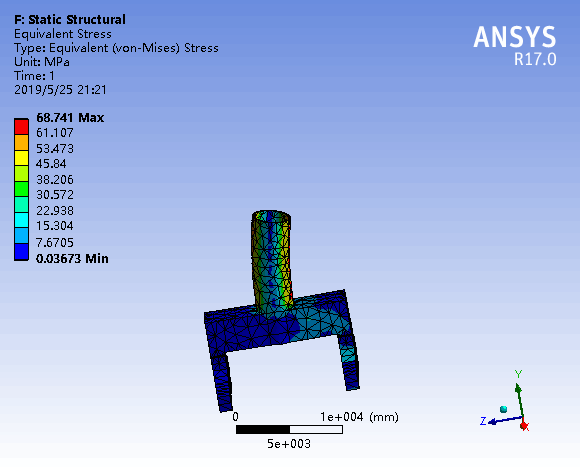
(2).在完成整体设计的基础上,完成对MQ2538门座式起重机圆通门架结构的设计:确定圆筒门架结构型式,完成圆筒门架结构载荷分析计算,利用SolidWorks建立圆筒门架结构简化的三维模型,并将模型导入Workbench中进行有限元分析,分析结构的力学性能是否符合设计要求,并得出符合设计要求的圆筒门架结构式样。
所有计算与设计过程和结果在下文中已经予以体现,并全部满足MQ2538门座式起重机的设计要求。
在完成设计计算与力学性能分析后,分别利用CAD绘制整机图纸、圆筒门架结构图纸和零件图纸共计3张A1图纸。所有图纸均已经完成。
第二章 总体设计与计算
2.1主要技术参数
主要技术参数表征起重机的性能特征。它是确定起重机具体结构、设计起重机尺寸大小的主要依据。主要技术参数的确定首先由用户根据需要提出,同时在考虑实际生产条件的基础上,通过与同类型的起重机进行分析比较之后加以确定。
在本次设计中,需要用到的门座式起重机的主要技术参数有:额定起重量Q、幅度R(最大幅度和最小幅度)、起升高度H和下降深度h、轨距S、基距B、起升速度、回转速度n、变幅速度、运行速度、轮压P、轨道型号和工作级别等。
2.1.1额定起重量Q
起重量表征起重机的起重能力。
额定起重量是指在正常工况下,起重机所能起升的最大净起重量,单位为kg或t。对于本设计里基本取物装置采用吊钩的MQ2538门座式起重机,额定起重量指的只是能够起升的最大货物质量,其吊钩的质量需要额外考虑。故MQ2538门座式起重机的额定起重量为25t,在本次设计中吊钩重量为1.717t。
2.1.2幅度R
幅度表征起重机的工作范围。
MQ2538门座式起重机的幅度是指起重机从回转中心线到取物装置中心线的水平方向上的距离。根据给出的设计参数,本次设计中MQ2538门座式起重机的最大幅度为38m,最小幅度为14m。
2.1.3起升高度H和下降深度h
起升高度和下降深度也表征起重机的工作范围。
起升高度是指起重机的支承面到取物装置最高位置的垂直距离;下降深度是指起重机的支承面到取物装置最低位置的垂直距离。起升总高度(D)是指起升高度和下降深度之和,即取物装置最高和最低工作位置之间的垂直距离(D=H h)。起升高度和下降深度的单位都是m。根据给出的设计参数,本次设计中MQ2538门座式起重机的轨上起升高度为30m,轨下下降高度为18m,故起升总高度为48m。
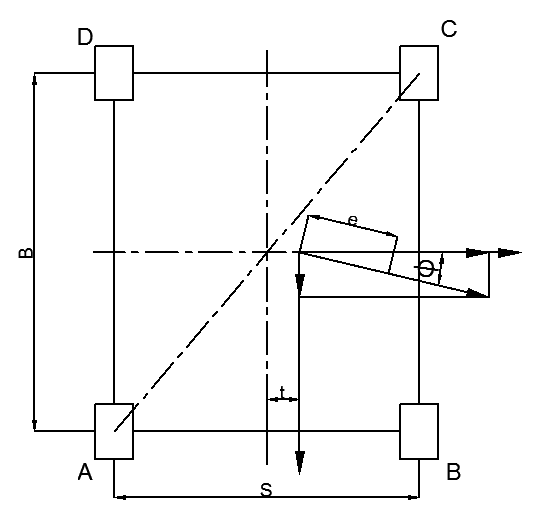
2.1.4轨距S
轨距是指门座式起重机两条运行轨道中心线之间的水平距离,单位是m。门座式起重机的轨距应根据其具体的环境条件、起重小车结构的需要以及整机的稳定性要求来确定。根据给出的设计参数,本次设计中MQ2538门座式起重机的轨距为12m。
2.1.5基距B
基距是指起重机支承中心线之间的水平距离,单位是m。门座式起重机的基距应根据其结构型式、轮压的数值以及整机的稳定性要求来确定。根据给出的设计参数,本次设计中MQ2538门座式起重机的基距为12m。
2.1.6工作速度
工作速度表征起重机各个机构运行的快慢程度。
起重机的工作速度主要有起升、回转、变幅和运行四种工作速度。
1.起升速度
起升速度是指在稳定运动的状态下,工作载荷垂直方向上的位移速度,单位是m/min。根据给出的设计参数,本次设计中MQ2538门座式起重机的起升速度为40m/min。
2.回转速度n
回转速度是指在稳定运动的状态下,起重机回转部分的回转速度,单位是r/min。根据给出的设计参数,本次设计中MQ2538门座式起重机的回转速度为1.5r/min。
3.变幅速度
变幅速度是指在稳定运动的状态下,工作载荷从最大幅度到最小幅度水平位移过程中的平均速度,单位是m/min或m/s。根据给出的设计参数,本次设计中MQ2538门座式起重机的变幅速度为55m/min。
4.运行速度
运行速度是指在稳定运动的状态下,起重机的水平位移速度,单位是m/min。根据给出的设计参数,本次设计中MQ2538门座式起重机的运行速度为30m/min。
2.1.7轮压P
轮压是指起重机的一个车轮对轨道竖直方向上的载荷,单位是N或kN,每个车轮的轮压大小应保持一致。根据给出的设计参数,本次设计中MQ2538门座式起重机的最大许用轮压为250kN。
2.1.8轨道型号
本次设计中MQ402538门座式起重机轨道使用的型号为QU80。
2.1.9工作级别
工作级别表征起重机起重量和时间的利用程度以及工作循环次数。不同机构的工作级别分别由其使用等级以及载荷状态级别确定,根据给出的设计参数,结合MQ2538门座式起重机各机构的实际情况,本次设计中起升机构的工作级别为 M8,变幅机构的工作级别定为 M7,回转机构的工作级别为 M6,运行机构的工作级别为 M5。
2.1.10风压
根据给出的设计参数,本次设计中MQ2538门座式起重机工作时最大风速为20m/s,非工作时最大风速为55m/s。
2.1.1 主要参数表
综上所述,本设计 MQ2538 门座式起重机的主要参数如表2.1:
表 2.1 MQ2538 主要技术参数表
项目名称 | 数值 | |
起重量 | 25t | |
工作幅度(最大/最小) | 38m/14m | |
起升高度(轨上/轨下) | 30m/18m | |
机构工作速度/工作级别 | 起升机构 | 40m/min M8 |
变幅机构 | 55m/min M7 | |
回转机构 | 1.5r/min M6 | |
运行机构 | 30m/min M5 | |
风速 | 工作最大风速 | 20m/s |
非工作最大风速 | 55m/s | |
基距/轨距 | 12m/12m | |
工作时最大轮压 | 250kN | |
最大尾部回转半径 | 10m | |
轨道型号 | QU80 | |
2.2臂架结构主要尺寸设计
2.2.1基本参数
首先根据给出的设计参数和以往的设计经验,确定最大幅度,最小幅度,回转半径,起重机轨面(或水面、地面)以上起升高度,臂架下铰点距轨面(或水面、地面)的垂直高度,取物装置所需空间高度。
所以计算幅度为:,,O点到象鼻梁端部滑轮中心的高度。
2.2.2刚性四连杆组合臂架方案
给出基本参数后,即可进行臂架系统各主要构件的尺寸计算。其中,需要计算的尺寸有:臂架长度、象鼻梁长度(象鼻梁前臂长度象鼻梁后臂长度)以及大拉杆长度。同时我们也需确定臂架下铰点和大拉杆铰点的位置。
计算各主要构件的尺寸时我们采用解析法:
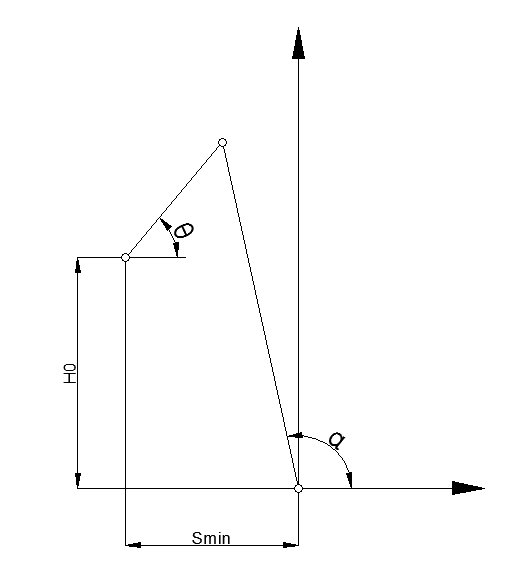
图2.1 和长度计算图
根据结构的要求,象鼻梁与臂架铰点向下偏置一段距离c,这里取。设计时将转化为,方便进行计算。其中:
由象鼻梁端点A的坐标,可计算得到轨迹方程组:
对方程组进行整理:
所得方程为象鼻梁端点A的轨迹曲线。
式中:
给出最小幅度时臂架和象鼻梁前臂角度和:
可算出:
取象鼻梁后臂长度。
使臂架端点处于以下三个横坐标位置时,象鼻梁端点A位于同一位置高度上,此时纵坐标上。这三个横坐标值为:
将三个相应高度坐标值、、和的数值代入轨迹方程(2.3)中,得到一个三元方程组,对方程组进行求解,即可解出:
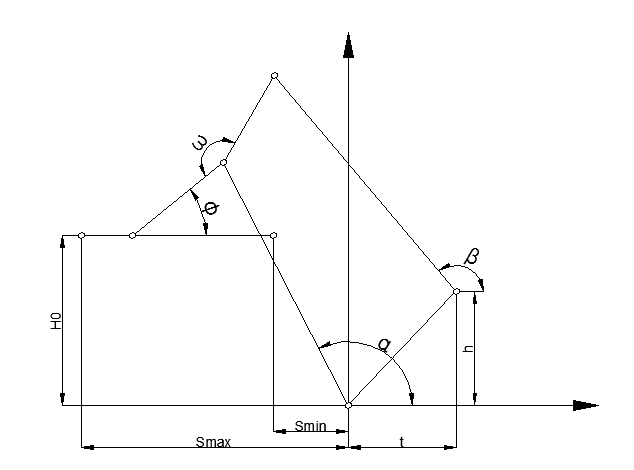
图2.2象鼻梁端点轨迹计算示意图
2.2.3货物水平位移校验
在计算出臂架系统各主要构件的尺寸后,需要对所得尺寸进行货物运动轨迹的最大高度偏差值Δ检验。
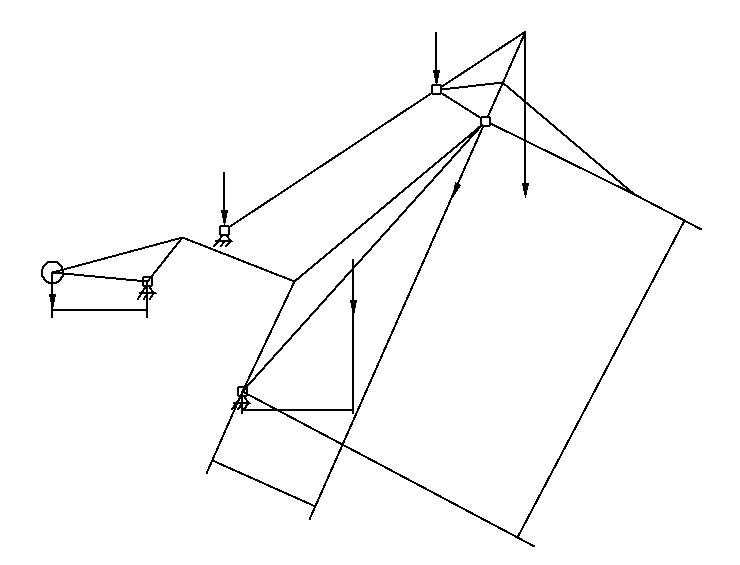
除了最大幅度和最小幅度以外,再任意取4个幅度,在CAD上画出臂架系统尺寸图,如图2.3和图2.4。
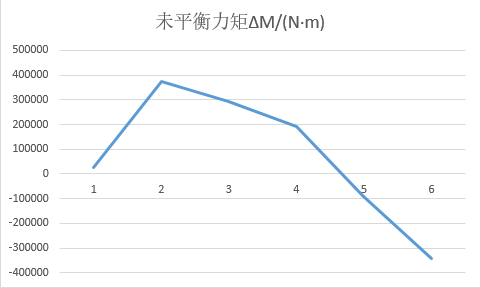
其中高度偏差值依次为 47.7mm, 292.8mm, 16.3mm,-73.4mm,-72.1mm, 47.7mm。做出高度偏差值Δ变化图,如图2.5。
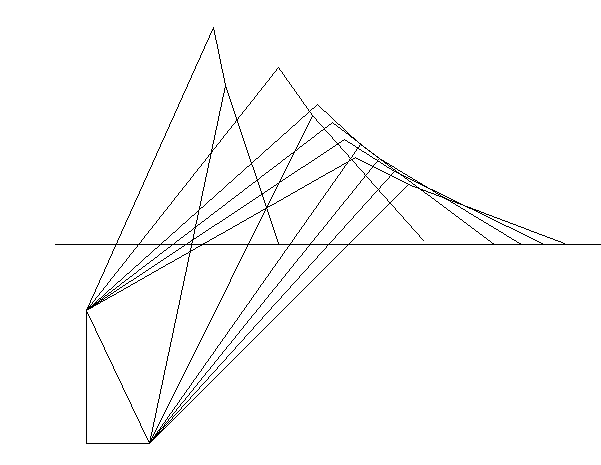
图2.3 6个幅度臂架位置图

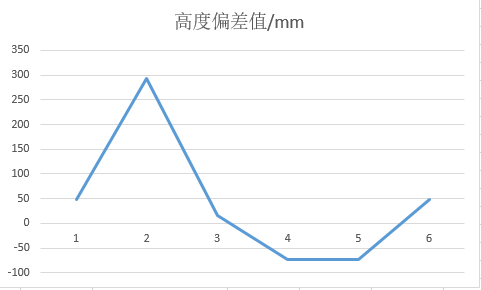 图2.4 象鼻梁端点位置放大图
图2.4 象鼻梁端点位置放大图
图2.5 高度偏差值Δ变化图
最大高度偏差值Δ,符合设计要求。
2.3杠杆-活对重法杠杆自重平衡系统
在变幅过程中,由于门座式起重机臂架系统重心上下变化时需要大量做功,消耗大量能量,引起变幅机构驱动功率的损耗。为了臂架系统的重心尽可能不发生或者减少高度的变化,本次设计中采用杠杆-活对重臂架自重平衡系统,确保在变幅过程中臂架整体合成重心沿水平线或者近似水平线的轨迹进行移动,从而降低整体的能耗,提高起重机的整体运行寿命。
2.3.1杠杆-活对重法杠杆自重平衡系统设计
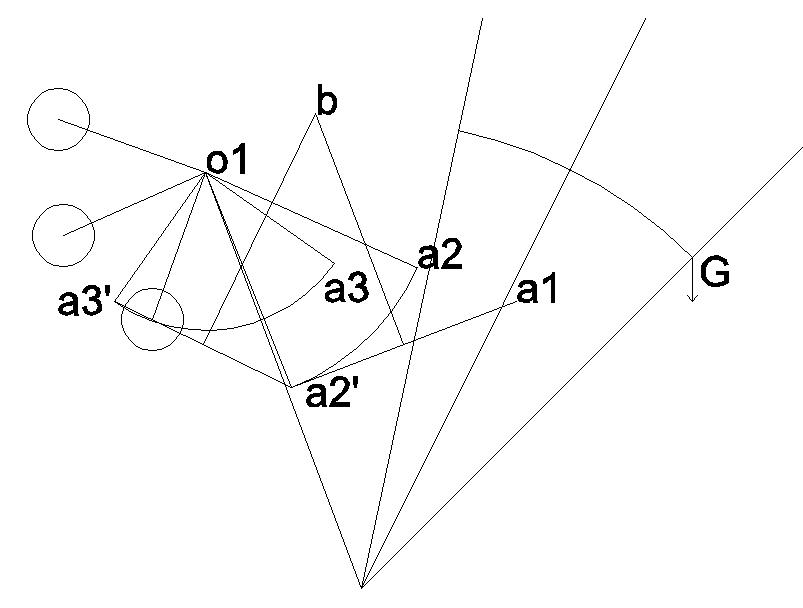
本次设计中,使用图解法完成杠杆-活对重法杠杆自重平衡系统的设计:
首先根据设计要求,确定杠杆支点的位置和活对重的转动半径,然后在臂架结构上初步确定小拉杆和臂架的连接点,在此基础上,采用图解法设计平衡系统,求出小拉杆和平衡梁前端长度及活对重重量,作图步骤如下:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: