基于PID及其改进算法的四旋翼无人机控制系统设计毕业论文
2020-02-19 18:59:43
摘 要
四旋翼无人机由于其体积小、重量轻、结构简单、造价低廉、控制简单在各行各业中被广泛应用。在军事领域的被广泛应用于侦查、监视、通信;在商业领域被用来航拍、监控、地形勘探;在研究领域常被研究人员用来测试飞行控制、导航和实时系统的有效性。国内外的学者在灾难和救援领域、农业领域、服务领域、娱乐领域、智能体设计领域都对四旋翼无人机的应用进行了系统有效的研究。在无人机的控制器的研究领域,学者们使用PID控制方法、模糊控制方法、滑模控制方法、反步控制法和神经网络控制法等方式对四旋翼无人机的控制系统进行了研究。
本文决定采用传统PID方法针对欠驱动的四旋翼无人机设计其控制系统,由于传统PID方法在控制四旋翼无人机时存在不足。决定采用模糊控制的方法对传统的PID方法进行改进。由于模糊控制具有人的某些智能,在复杂的、不能用清晰的数学结构表达的系统控制中非常有效,可以根据控制对象状态的变动,实时调整PID的控制参数。然后将这两种方法的控制系统进行对比分析,验证了模糊改进算法的有效性。
通过两种四旋翼无人机控制系统的设计和对比分析,证明了模糊方法在设计具有耦合性、滞后性、复杂性和非线性的四旋翼无人机控制系统的有效性。设计出了基于模糊PID方法的有高效性能的四旋翼无人机控制系统。
关键词:四旋翼无人机;PID控制;模糊控制
Abstract
Four-rotor uav is widely used in all walks of life because of its small size, light weight, simple structure, low cost and simple control. In the military field is widely used in detection, surveillance, communications; It is used for aerial photography, monitoring and terrain exploration in the commercial field. In the research field, it is often used by researchers to test the effectiveness of flight control, navigation and real-time systems. Scholars at home and abroad have systematically and effectively studied the application of quad-rotor uav in the fields of disaster and rescue, agriculture, service, entertainment and intelligent design. In the field of uav controller research, scholars used PID control method, fuzzy control method, sliding mode control method, reverse step control method and neural network control method to study the control system of four-rotor uav.
In this paper, the traditional PID method is adopted to design the control system of the under-actuated quadrotor uav. It is decided to adopt the fuzzy control method to improve the traditional PID method. Because fuzzy control has some human intelligence, it is very effective in complex system control which cannot be expressed by clear mathematical structure. It can adjust the PID control parameters in real time according to the change of control object state. Then the control systems of the two methods are compared and analyzed to verify the effectiveness of the fuzzy improved algorithm.
Through the design and comparative analysis of two kinds of four-rotor uav control systems, the effectiveness of fuzzy method in the design of the four-rotor uav control system with coupling, hysteresis, complexity and nonlinearity is proved. A four-rotor uav control system with high performance based on fuzzy PID method is designed.
Keywords: Four-rotor uav;PID control;Fuzzy control
目录
第1章 绪论 3
1.1课题背景及研究目的及意义 3
1.2国内外研究现状 4
1.2.1四旋翼无人机的发展历史 4
1.2.2四旋翼无人机国内外研究现状 5
1.3研究内容及目标 6
第2章 四旋翼无人机飞行原理及建模 8
2.1四旋翼无人机的结构 8
2.2四旋翼无人机的飞行原理 9
2.2.1四旋翼无人机的运动控制方法 9
2.2.2四旋翼无人机的飞行姿态的控制方法 10
2.3四旋翼无人机系统建模 12
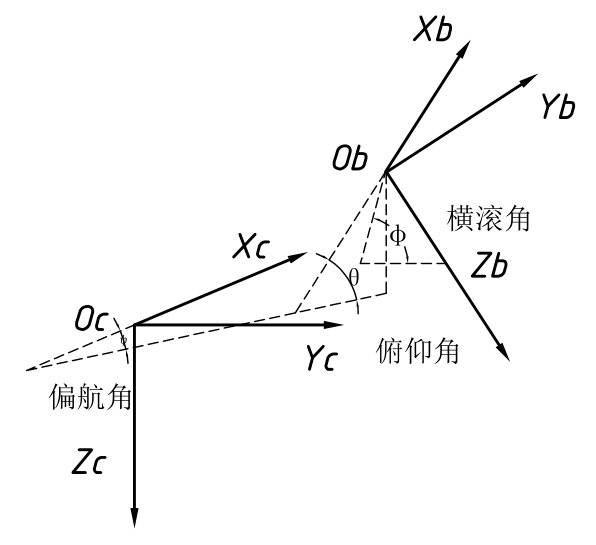
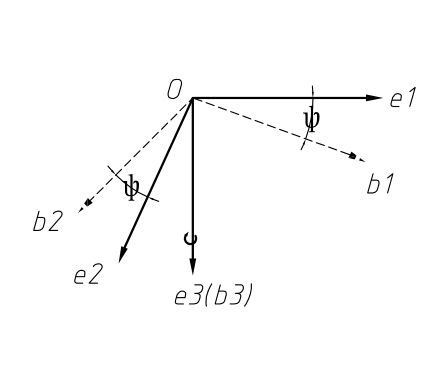
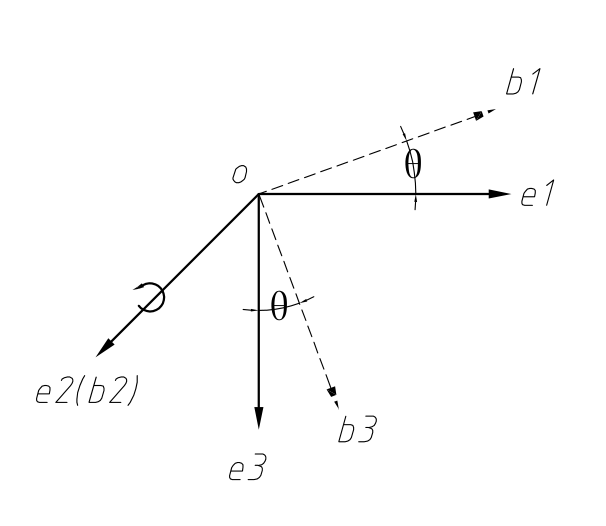
2.3.1四旋翼无人机的坐标系及姿态描述 12
2.3.2四旋翼无人机运动数学模型的建立 17
2.3.3四旋翼无人机动力数学模型的建立 18
第3章 基于PID方法的飞行控制系统设计 23
3.1 PID控制器的结构及其原理 23
3.1.1模拟PID控制结构及原理 23
3.1.2数字PID控制结构及原理 24
3.2四旋翼无人机控制器总体设计方案 25
3.2.1方案一:双层串级PID控制 25
3.2.3方案二:三层串级PID控制 25
3.3 PID方法的飞行控制器设计 26
3.3.1基于方案一的飞行控制器设计及仿真结果分析 26
3.3.2基于方案二的飞行控制器设计及仿真结果分析 33
3.4本章总结 34
第4章 基于模糊控制改进的PID方法的飞行控制系统设计 35
4.1改进算法的基本原理 35
4.1.1模糊集合 35
4.1.2隶属函数 36
4.1.3模糊推理 37
4.1.4清晰化 37
4.2模糊算法的设计 37
4.2.1模糊化实现 38
4.2.2模糊推理实现 39
4.2.3清晰化实现 41
4.3模糊PID控制器的设计及仿真结果分析 42
第5章 实验验证 47
5.1 飞行轨迹验证 47
5.2实物飞行验证 48
结论 50
参考文献 51
致谢 53
绪论
四旋翼无人机目前在各行各业有广泛的应用,四旋翼无人机的控制算法复杂,限制了四旋翼无人机的进一步发展和应用。研究四旋翼无人机的控制算法对四旋翼无人机的应用有很大帮助。PID算法是基础的四旋翼无人机控制算法,而改进的模糊PID算法使四旋翼无人机的飞行更加稳定。
1.1课题背景及研究目的及意义
无人机是一种自备程序算法可被远程操控的无人飞行器。随着通信、微电子、材料等领域技术的不断发展,无人机得到了迅速的发展,被广泛应用于各个实用领域。
能够垂直起降的四旋翼无人机发展最为迅速。它具有其他固定翼无人机无法比拟的优越性,在军事领域常用来执行侦察、目标截获、监视、中断通信等各种重要任务;在商业领域常用来执行地形勘探、航拍、电影取景、监控等飞行任务;在研究领域常凭借它独特的控制结构被研究人员选做测试的工具,其可以用来测试实时系统、飞行控制、飞行导航的有效性等[1]。
四旋翼无人机的结构与传统飞行器的结构不同,四旋翼无人机只能通过调节四个螺旋桨的转速控制姿态的变化,对升力实现分解,以此实现三个位置自由度的位移[[2]]。
与传统的无人机相比飞行器具有如下几种优势:
1、体积较小、重量较轻、有隐蔽性。
2、能够灵活的垂直起降,机动性强,姿态控制简便。
3、结构简易、性价比高,适用于危险的场合。
四旋翼无人机具有相互交叉的两对旋翼,除了如上文所述的调节两对旋翼的转速控制飞行姿态和三个位置自由度,其独特的优势是可以抵消每对螺旋桨产生的反桨扭矩。而不像直升机一样需要繁杂的机械装置,从而减轻了飞行器重量、减少了飞行器的体积、提高了其负载能力[[3]]。
四旋翼无人机最重要的性能是飞行的稳定性,而飞行平稳需要一个稳定的控制系统,控制系统的性能决定了四旋翼飞行器飞行状态的稳定程度。因此对四旋翼无人机的控制方法进行研究和改进对于四旋翼无人机的发展有重大帮助[[4]]
四旋翼无人机的数学模型较为复杂,对外界环境的变化很敏感,并且具有强耦合、多输入、多变量、欠驱动等特点[[5]],其控制算法具有一定难度,因此它的使用受到了限制。针对这一困难,目前的四旋翼无人机的控制方式大多采用传统的经典PID控制方式。经典的PID控制算法的适应性强,被广泛的使用在各种工业领域,其中就包括对四旋翼无人机的控制。采用传统的PID控制方法,易于实现对无人机的控制,在此基础上还要尝试对传统PID方法进行改进,提升四旋翼无人机的稳定性[[6]]。
1.2国内外研究现状
1.2.1四旋翼无人机的发展历史
四旋翼无人机有100多年的发展历史了。1907年,法国Breguet兄弟制造出了世界上第一架多旋翼飞行器。随着这一领域的继续发展,1920年,法国工程师Étienne Oehmichen开创性地设计出了能够飞行14分钟的旋翼飞行器,。1921年,俄裔美国人George de Bothezat设计建造了一架大型四旋翼飞行器,这架飞机除了飞行员外还能再搭载3名乘客。其图示图1.1所示
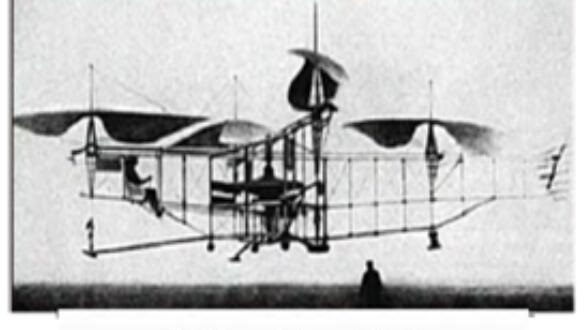
图1.1 Geprge de Bothezat(1922.12)
到了20世纪50年代,Curtiss-Wrigh公司设计了一种四旋翼飞行器,被称作“飞行吉普”,实现了稳定的飞行。如下图1.2所示,但最终没有达到实际使用需要的高度和速度。

图1.3 Curtiss-Wright VZ-7
直到20世纪90年代,因为MEMS(惯性导航系统)的应用,多旋翼飞行器开始实现了较为稳定的飞行。如下图1.3所示,在德国年轻研究者比赛中,现今常用的四旋翼无人机结构被发明,随后被广泛应用,至今的大部分四旋翼无人机仍然采用这种结构。
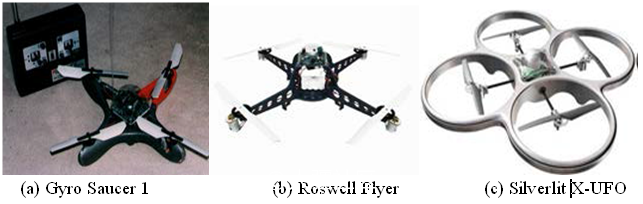
图1.3Silverlit X-UFO
此后,多旋翼无人机获得迅速发展,各种多旋翼无人机公司和消费级旋翼无人机层出不穷。新世纪的四旋翼无人机重量、速度和飞行得到稳定性获得了巨大进步,四旋翼无人机开始广泛应用于各行各业。
1.2.2四旋翼无人机国内外研究现状
在应用领域:近年来,由于四旋翼无人机的低成本、不同尺寸和可操作性的实现,四旋翼无人机在各种不同情形下的应用逐年增加,针对危险地点、灾难和救援的设计背景,学者们提出了针对危险区域的四旋翼无人机传感系统设计、基于低成本全自主 GPS的四翼直升机灾害管理;在农业领域,学者们提出了使用四翼机无人机的地形拼接;在帮助性质的工作方面,学者们提出了用飞行机器人 3D 打印、通过强化学习探索四翼无人机服务员如何提供饮料;在娱乐领域方面,学者们通过无人机在娱乐、AVR 增强和虚拟现实中的应用进行其在娱乐领域的调查分析;在多智能体系统设计领域,学者们提出了多旋翼编队控制研究综述、基于分层方法的具有避障和自碰撞的四边形协同编队控制、基于多曲面控制的多直角坐标自适应前导跟随控制[[7]]。
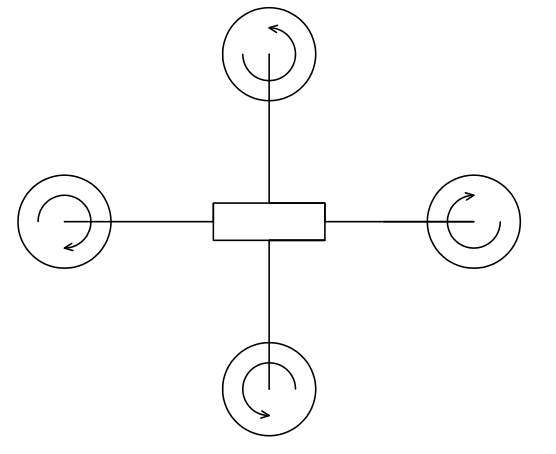
在控制器的设计领域:四旋翼无人机拥有4个臂,每个臂上有一个转子,置于相反臂上的两个转子以顺时针方向旋转,而其他转子以逆时针方向旋转。由于四转子系统的转子数少于自由度数,因此是一个欠驱动系统,并且由于飞行器本身复杂和所处环境的复杂,这就使得四旋翼无人机的控制器设计难度更加增加。这也引起了国内外学者的关注,采用了各种不同的控制方法进行了四旋翼无人机控制器研究。
在进行四旋翼无人机控制系统设计时,主流的方法是通过建立机体坐标系和地理坐标系进行分析建模。结合自身受力和外界环境的变化,根据这两者的变化和相互联系,实时调节四个转子的转速,维持飞行器的稳定。主要的理论控制算法有如下几个方面:
(1)PID控制:PID算法是控制行业最经典、最简单、而又最能体现反馈控制思想的算法。PID算法的流程非常简单,就是利用反馈方法检测偏差信号,并通过偏差信号来控制被控量。由于PID算法是最基本的算法,许多学者对普通PID算法的四旋翼无人机控制系统进行研究,这种算法也是在进行四旋翼无人机控制器设计时的基础,东华大学的有关学者做了使用串级PID控制算法的四旋翼无人机控制器[[8]]。其他学者设计各种算法时也将PID控制作为基础进行研究。
(2)模糊控制:模糊控制的主要内容是模糊集合论、模糊语言变量和模糊逻辑推理。模糊控制通过模糊化、模糊推理和清晰化三个基本过程,在不使用被控对象的精确数学模型的情况下,根据人们的经验智慧完成控制,设计简单,应用方便[[9]]。所以当被控对象的精确模型无法控制时,可以倾向采用这种方法进行设计,对于非线性、大时滞、时变系统[[10]],模糊控制具有较好的效果,并且设计十分简便。浙江树人大学的许森[[11]]、内蒙古科技大学的于文妍[[12]]、哈尔冰工业大学对高洁[[13]]都采用这种方法进行四旋翼无人机控制器的设计。
(3)滑模控制:滑模控制是变结构控制中的主流设计方法。它具有对对象的数学模型精度要求低,能够适应内部的震动并且鲁棒性好的特点,其针对参数不确定性提出分等级控制结构以简化控制器的设计,因此具有简便易实现的特点。湖北工业大学的熊梓威[[14]]和南京理工大学的冯恺鹏[[15]]等都使用这种方法进行四旋翼无人机控制器的设计。
(4)反步法控制:反步法在控制器设计过程中使用反向设计,使得其设计结构系统化和结构化。在使用反步法设计四旋翼无人机控制系统的研究中,通过对比仿真证明了反步法比普通PID控制算法对于四旋翼无人机的控制效果更好。湖南大学的王媛媛[[16]]和东北大学的周来宏等人都采用这种方法进行四旋翼无人机控制器的设计。
(5)神经网络控制:当遇到传统控制方法控制效果差的的不确定对象的问题时,神经网络控制作为一种有学习能力的智能控制方法可以起到较好的效果。电子科技大学的王亚[[17]]和哈尔滨工业大学的张曙光[[18]]都采用这种方式进行四旋翼无人机控制器的设计。
还有其他新型算法被运用到四旋翼无人机控制器的设计中[[19]]。
1.3研究内容及目标
本次设计首先要在理解无人机的结构和飞行原理的基础上,完成对四旋翼无人机运动的数学建模,然后 使用PID方法进行飞行控制系统设计,完成仿真实验和结果分析。接着使用模糊控制方法对传统PID方法进行改进,使用模糊PID方法完成飞行控制系统设计,同样进行仿真实验和结果分析。最终将两种方法进行对比分析,分析两种方法对于影响无人机稳定性的各种参数的影响。最终总结四旋翼无人机飞行控制系统设计的经验。
系统设计框图如下:
图1.4 设计流程图
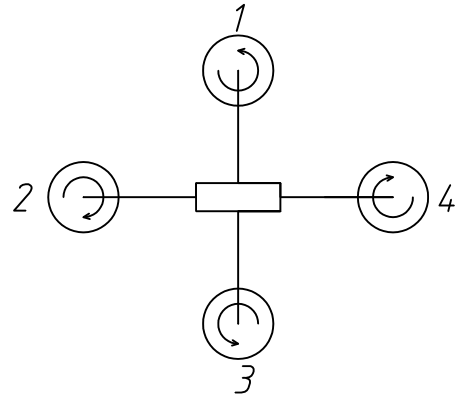
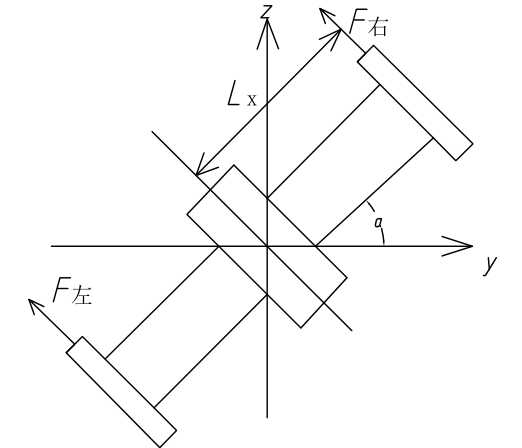
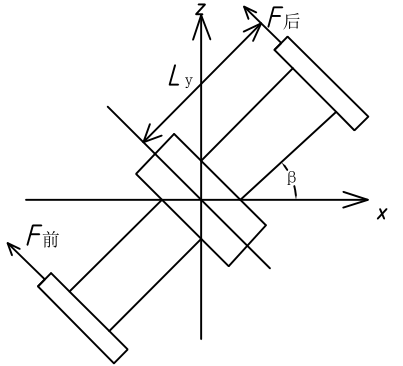
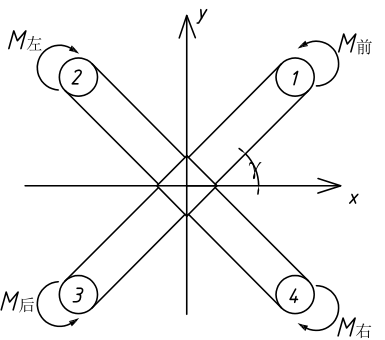
四旋翼无人机通过调节其四个电机的转动角速度来实现控制。每个电机都会产生一个升力和转矩,从而产生作用于四旋翼飞行器的总上升力、横滚力矩、俯仰力矩和偏航力矩。根据各个电机速度的不同,调节各个力的大小,控制四旋翼无人机进行上升、横滚、俯仰和偏航运动。
在进行无人机的总体设计时,根据已知的四旋翼无人机的飞行原理、受力情况总体结构以及姿态位置动力学模型建立四旋翼无人机的模型。通过欧拉角建立机体坐标系到惯性系之间的关系,然后对机体进行分析建立模型,并且对模型方程所涉及的参数进行简化,忽略一些影响较小的参数,从而使问题分析变得简单。
接着使用PID方法完成对无人机控制系统的设计。比例项P是对当前误差值的修正,积分项I是对过去偏差的修正,微分项基于误差的变化率产生,是对将来偏差的预估,用来反应偏差的变化趋势,以改善系统的动态性能。具体使用PID算法时要根据现实的工程情况进行修改与完善。最终完成四旋翼无人机的整体控制系统设计。
对于时滞、时变、非线性比较明显的现象,传统的PID控制算法的控制参数不易于在线调节,因而要针对这种情况进行改进。在本次设计中倾向采用模糊PID,模糊PID克服了传统PID无法实时调整参数的缺点。通过不断微调PID的参数改善了传统PID控制方法。
通过比较两种PID方法的仿真曲线,比较如超调量、调节时间等参数,对比两种方法控制器的性能。总结四旋翼无人机控制系统的设计经验,展望未来的改进方向。
第2章 四旋翼无人机飞行原理及建模
在进行四旋翼无人机控制系统设计前,首先要明确四旋翼无人机的飞行原理,进而进行数学模型的建立,才可以对四旋翼无人机的控制系统进行仿真。
2.1四旋翼无人机的结构
四旋翼飞行器的主要动力装置是4个可以独立控制转速的外转子直流无刷电机驱动的螺旋桨。这4个固定迎角的螺旋桨安装在十字向交的刚性碳素杆两端[[20]],如下图2.1所示。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: