基于汽车副驾驶座椅创新设计毕业论文
2020-02-19 18:57:42
摘 要
随着汽车工业的不断发展,汽车副驾驶上涌现出的变化也日新月异,乘坐舒适性也得到了巨大的提升,但是目前而讲,很多车型由于空间狭隘,使得行动不便的人士难以获得较佳的乘坐体验。为了改善这种不足,以及更大限度的提升汽车副驾驶座椅的舒适性,设计一种由步进电机驱动的多自由度的可调节副驾驶。
在本次设计中,汽车副驾驶座椅有着左右运动,前后运动,以及俯仰运动的运动形式,根据其运动方式以及空间限制,确定其传动方式以及安装方式,进行结构设计以便于其达到预定的要求,对关键受力部位进行计算校核,通过三维建模软件进行三维建模,并对承重组件进行一系列应力分析和安全性评定,满足要求后,生成二维图纸。
本次设计在现有的基础上,增添了副驾驶座椅的左右运动,以及可达到平躺的俯仰运动。这些对于改善汽车副驾驶乘坐体验,有着较为显著的结果。
关键词:汽车副驾驶;机械结构设计;可调式座椅
Abstract
With the continuous development of the automobile industry, the changes in the car co-pilot are also changing with each passing day, and the ride comfort has also been greatly improved. However, at present, many models are difficult to obtain better because of the narrow space. Ride experience. In order to improve this deficiency and to increase the comfort of the car's co-pilot seat to a greater extent, an adjustable co-pilot with multiple degrees of freedom driven by a stepper motor is designed.
In this design, the car co-pilot seat has the form of left and right movement, front and rear movement, and pitching movement. According to its movement mode and space limitation, its transmission mode and installation method are determined, and the structural design is designed so that it can reach the predetermined Requirements, calculation and verification of key stress parts, 3D modeling through 3D modeling software, and a series of stress analysis and safety assessment of load-bearing components, to meet the requirements, generate 2D drawings.
On the basis of the existing design, this design adds the left and right movement of the front passenger seat and the reclining motion that can be achieved. These have relatively significant results for improving the ride experience of the car.
Key words: car co-pilot; mechanical structure design; adjustable seat
目录
摘要 1
第一章 绪论 1
1.1 研究的背景及意义 1
1.2 国内外研究现状 1
1.3 研究内容 2
第2章 可调式座椅的机械结构设计 3
2.1整体设计分析 3
2.2 座椅前后式移动分析及设计 4
2.2.1 齿轮齿条的选型 5
2.1.2 减速机的选型 6
2.1.3 步进电机选型 7
2.3座椅左右式移动分析及设计 8
2.4座椅靠背俯仰式分析与设计 10
2.4.2齿轮设计] 11
2.4.3轴的设计 15
2.4.4减速机及步进电机选型 17
2.4.5减速机及步进电机选型 18
第3章关键零部件净应力分析及校核 19
3.1 靠板的分析和校核 19
3.2 座身的分析和校核 20
3.3 左支板的分析和校核 22
3.4 右支板的分析和校核 23
第4章 整体设计结果及示意图 26
总结与展望 27
总结 27
展望 27
参考文献 28
致谢 29
第一章 绪论
本章介绍了此次毕业设计的研究背景,目的以及意义。通过分析当今汽车工业的发展和汽车副驾驶座椅的现状,确定本次设计的主要任务,以及所期待达到的目标。
1.1 研究的背景及意义
自汽车被发明以来,一百多年间汽车工业发生了巨大的变化,如今已经渗透到生活的各个方面。改革开放一来,我国的汽车工业经过中外合资30年的发展,汽车保有量不断提高。我国公安部交管局在去年7月发布,截至去年6月底,我国机动车存量已达3.19亿辆。去年上半年,注册机动车1636万辆,高于前年同期1594万的登记量。新能源汽车存量达199万辆,私家车存量达1.8亿辆,去年以来,保有量月均增加166万辆,保持快速增长。
目前,全国有60个城市汽车保有量超百万辆,8个城市保有量达300万辆以上。货车保有量2500万辆,去年上半年注册登记载货汽车达172万辆,明显高于前年同期156万辆的登记量,为历史的最高水平。
随着汽车工业不断的发展,也带动着人们需求的不断提高。从最初的对于速度的追求,到现在的追求舒适感,娱乐性。也要求着汽车工业的进一步发展,来满足消费者与时俱进的需求[1]。
汽车副驾驶是当今几乎所有车型都离不开的一个位置。自汽车诞生以来,汽车副驾驶就应运而生。为保证行车安全,在现代汽车上广泛采用对乘员施加固定约束的安全带、头枕、气囊以及在汽车碰撞时防止乘员受伤的各种缓冲和包垫装置,并在此基础上不断提高舒适性。
汽车拥有着后排所没有的独特体验。在人们对于安全性和舒适性日益重视的今天,对于汽车副驾驶的创新设计显得十分有意义[2]。
1.2 国内外研究现状
汽车副驾驶的概念伴随着汽车的出现而出现,距今已有一百多年的历史。并且在汽车工业化的进程中不断被完善发展,如今已经有着非常成熟的技术。最近几年的文献中,大多针对于汽车副驾驶的振动分析以及安全气囊的保护性进行分析改进[3-5]。与此同时,涌也现出了大批专利来提高副驾驶的乘坐体验[6],比如储物仓的设计,遮光板的设计[7-8],他们都是在提高副驾驶的乘坐的体验。甚至于副刹车的设计,但我认为,副刹车的设计不够合理,甚至还有着相当的危险性。而亟待改进的是座椅本身[9]。
关于座椅本身的设计,相关的文献凤毛麟角。目前有一款关于汽车副驾驶平躺系统的专利,主要运用动力系统来提高副驾驶的俯仰程度,能让副驾驶人员得到充分的休息,极大地提升了在长途旅行中的乘坐体验。还有一种汽车副驾驶位座椅智能调节系统,它包括存储记忆单元、身份识别单元、CPU处理器、副驾座椅前后驱动调整装置以及副驾座椅上下驱动调整装置,通过智能记录乘客信息,自动调整座椅姿态,可以给汽车副驾乘客人员提供一种智能舒适的用户体验。当然也有些基于生物识别的座椅,但都停留在实验阶段,并未商用量产。也有通过改变材料来提高座椅的舒适性和安全性,但这方面主要涉及材料学方面的知识[10],本次设计主要在于机械方面。座椅本身的改进,对于乘客舒适度的提高有着显而易见的作用。虽然现如今驾驶座的设计已经相当人性化,但是在安全性与舒适性方面还有着提高的余地[11-13]。
因此,本次设计在前人的基础上,力求寻找一个性价比更高的设计方案,来提升副驾驶座椅的安全性与舒适性。
1.3 研究内容
初始条件:以宝骏560为原型车,以承载200千克为设计初始数据,座位宽60cm,车门高85-110cm,宽90cm。
根据目前汽车前排副驾驶座椅的结构及功能进行分析,在此基础上对座椅进行创新性设计,在满足安全及法规要求的前提下,尽可能的满足坐乘人员的舒适性要求,座椅前后、左右可移动式、可转动式、前后仰俯式,尽可能考虑座椅的物理信息与互联网信息深度融合,同时设计对于安全带也重新进行设计。
本次设计主要是结合工程、力学、人机工程学和美学等学科,并结合技术发展赋予座椅新功能,主要考虑其机械结构的设计。
就目前而言,可行性比较大的就是在副座椅的活动性范围进行改进,提高副座椅的舒适性,在提高副驾驶座椅的舒适性的同时,也要提高副驾驶座椅的安全性,因此,我考虑将副驾驶座椅实行多个自由度的运动,比如前后运动以及俯仰式,实现汽车座椅的多维运动[13] ,提高舒适性,方便行动不便的乘客上下车,以及调节座椅的左右位置。
从座椅的自由度以及安全性着手,提高座椅的舒适性与安全性。采用伺服电机,控制座椅的多自由度运动,在这个过程中伺服电机的功率不能过大,分析运动受力之后,设定合理的传动比,并且控制噪音与运动所需的空间。使用按钮的方法来完成目标运动,轻松简洁,在上车之前就可以调整好座椅姿态。
与此同时,以上方案也有着较强的可实现性。
第2章 可调式座椅的机械结构设计
对于可调式座椅的机械结构设计,包含了其传动方案的设计,各结构部件的设计,同时也要考虑多维度运动有无干涉的问题,在设计中要考虑安装空间的限制,以及安装顺序的问题,在其基础之上,进行设计与改进。
2.1整体设计分析
设计的难点在于,在设计座椅某一个移动机构的时候,要考虑到其他两个运动机构的实现方式,以防设计的机构有着致命的缺陷,影响接下来的设计,因此,在设计之初,要首先考虑整体机构的运动方式。
首先,相对于其他两者运动而言,座椅的前后运动时较为简单的一种实现方式,设计的初衷时解放人力,为行动不便者提供更为舒适的乘车体验。因此采用电机驱动,矩形导轨导向。显而易见的是,此处的传动采用齿轮齿条时最优解,这时候需要考虑的就是齿轮齿条的相对安装位置。由于车厢内空间有限,因此,将齿条与车厢体连接固定,齿轮与减速器以及步进电机连接。安装固定在座椅整体上,工作时,步进电机经减速器驱动齿轮转动,齿轮与齿条相啮合,推动座椅前后运动。
其次是座椅的左右移动,依旧选用齿轮齿条传动。由于车厢内空间有限,座椅的左右运动时一件可望而不可得的事,因此,要考虑座椅左右运动的初衷,其初衷在于,便于行动不便者上下车。因此,在设计中退而求其次,将座椅的左右运动拆分成座和靠背,在座左右移动的同时,保持靠背的固定,这样就大大的减少了对空间的需求。在这种情况下,考虑到座和靠背在前后运动的情况下需要同步在电机的驱动下同步进行前后移动。所以座椅左右移动时,其齿轮齿条的安装位置有着较大的限制,假如齿轮安装在座上,那么齿条就要安装在靠背上,假如齿轮安装在靠背上,那么齿条就要安装的座上,通过空间位置以及安装位置的分析,综合考虑后,将齿轮安装在座上,将齿条安装在靠背上。
在上述情况下,齿轮与齿条既能同步进行前后移动,同时在靠背不动的情况下,在特定的位置座椅可以进行左右运动。因此,在座与靠背之间,需要一个既能够传递力,又能够发生相对运动的部件,在这里,选用一个卡槽,将座与靠背连接,以此传递前后的力,同时不影响左右的相对移动。
整体来讲,前后及左右运动的设计思路如上。
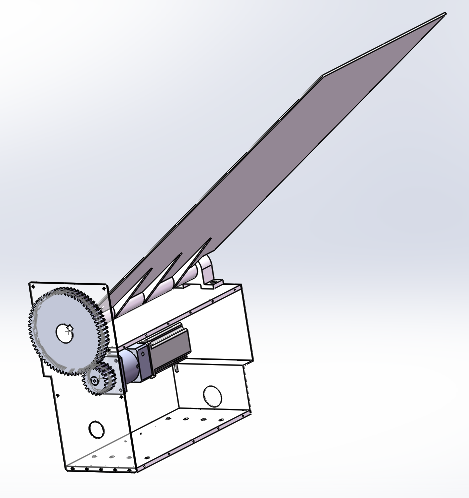
相对于前两者,俯仰机构的运动更加独立,本次设计中,希望达到的预期平躺目的,当平躺的时候,靠板将会受到很大的力,并且传递给转轴很大的扭矩,在结构设计稳固的前提下,还必须经过多级减速,来释放较大的扭矩,本次设计中,将靠板焊接到中间转轴上,并用加强筋来提高强度,在经齿轮多级减速,用步进电机驱动运转。在俯仰机构的设计中,最重要的是保证强度,以此来保证安全性。
2.2 座椅前后式移动分析及设计
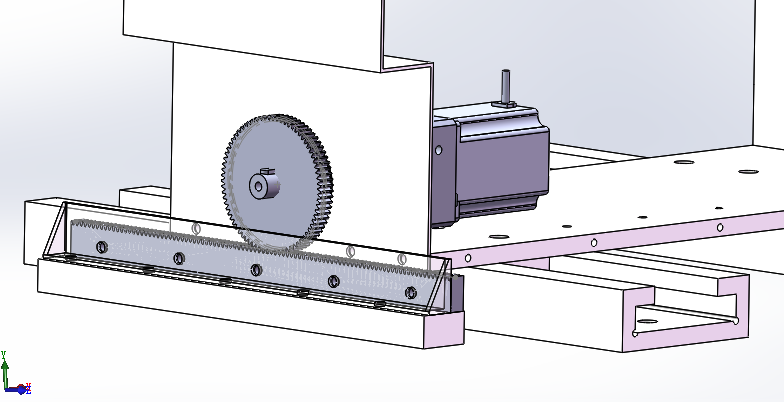
本次设计中,要求座椅可以前后移动,这种就类似于传统的座椅前后调节装置,不同点在于将人力驱动,转化为电机驱动,便于行动不便者调节座椅前后距离,获得更舒适的乘坐体验,传动方式采用减速机以及齿轮齿条传动,动力件使用步进电机,采用矩形导轨导向。
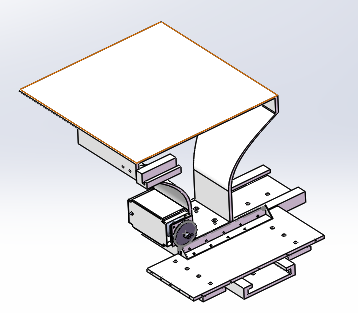
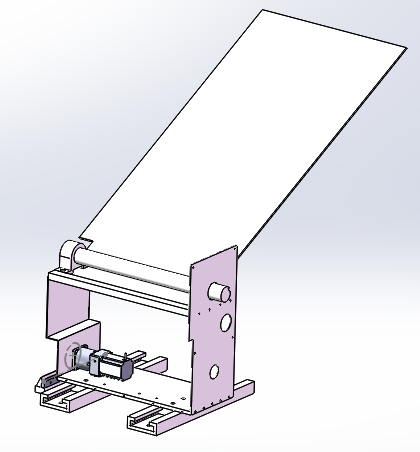 其整体的结构示意图[14]如图2.1所示:
其整体的结构示意图[14]如图2.1所示:
图2.1 前后移动式结构示意图
导轨以及齿条固定在基板上,导轨对座椅的前后移动进行导向,齿轮齿条啮合传动,对座椅产生推力,使座椅可以按照既定的轨迹进行运动,齿条安装在座椅的右侧,为了最大限度的减少对车厢外的空间的占用,将右侧支撑板采取折弯设计,将齿轮安装在折弯部位以下,在结构上看起来更加紧密。
电机放置在底板上,并与减速器连接,安装固定到右侧板上,以此来传递力,使其底板承受较大的力,并且承担着安装底座的作用,因此将底板的厚度定为10mm,底板上安装前后左右四块挡板(为了便于展示内部结构,前后挡板在图-中省略),并未采用钣金件,原因是其内部外部零件安装较为复杂,这样可以在最大程度上提高可安装性。
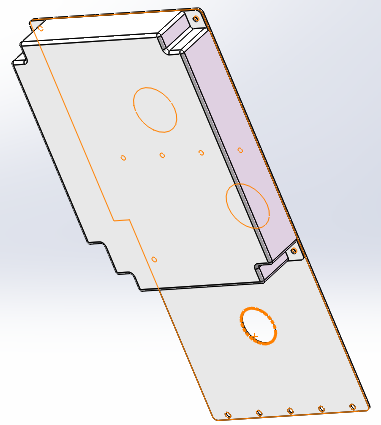
与下板一样,上板也有着较多的安装孔,并且上板还承担着带动“座”部分前后移动的任务(这点会在下章重点说明),因此上板的厚度也定为10mm,靠背也通过轴承安装在上板上,这点关系到靠背的俯仰运动。
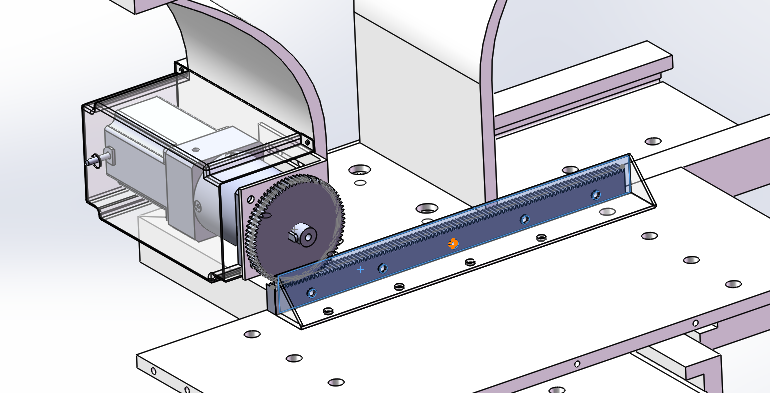
 齿轮齿条部位详细三维图,如图2.2所示,通过齿条安装块对齿轮安装高度进行调节,并且利用齿轮安装支架将其固定,值得注意的是,齿轮安装支架要略微伸出,以起到轴向定位的作用。
齿轮齿条部位详细三维图,如图2.2所示,通过齿条安装块对齿轮安装高度进行调节,并且利用齿轮安装支架将其固定,值得注意的是,齿轮安装支架要略微伸出,以起到轴向定位的作用。
图2.2 齿轮齿条传动示意图
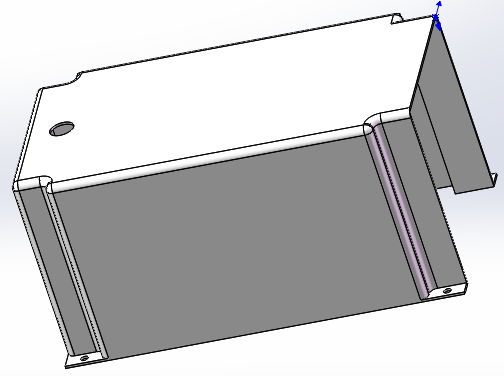
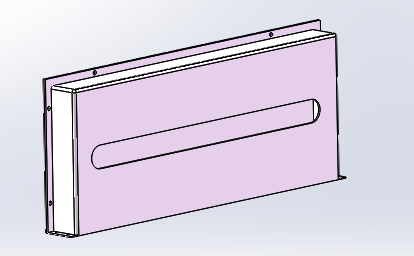 由于齿轮齿条安装位置处于机箱整体之外,出于安全性的考虑故还需要通过隔离箱将其隔离,隔离箱三维图如图-所示,其安装到基板上,因为齿轮齿条啮合传动时,齿轮以及齿轮轴会与隔离箱发生相对移动,根据前后运动的行程,确定出为轴预留的位置。
由于齿轮齿条安装位置处于机箱整体之外,出于安全性的考虑故还需要通过隔离箱将其隔离,隔离箱三维图如图-所示,其安装到基板上,因为齿轮齿条啮合传动时,齿轮以及齿轮轴会与隔离箱发生相对移动,根据前后运动的行程,确定出为轴预留的位置。
图2.3 齿条箱盖示意图
2.2.1 齿轮齿条的选型
本次设计中,要求承重200kg,座椅自重暂定为30kg,考虑导轨的摩擦系数为0.2,摩擦力为460N,选用齿轮齿条,此处齿轮齿条选用外购件,型号为:GEAHB1.0-75-10-A-20,其重要参数如表所示:
模数(mm) | 齿数 | 齿宽 (mm) | 齿轮形状 | 基准圆直径(mm) | 齿顶圆直径 (mm) | 齿根圆 (mm) | 容许传递力(N・m) |
1 | 75 | 10 | A | 75 | 77 | 72.5 | 18.38 |
表2.1 齿轮GEAHB1.0-75-10-A-20参数
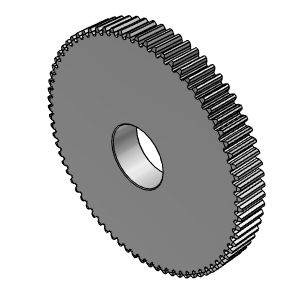 其示意图如图2.4如所示
其示意图如图2.4如所示
图2.4 齿轮GEAHB1.0-75-10-A-20模型
齿条选用外购件,其压力角以及模数,要和所选用齿轮相同,在此基础上,选定齿条其型号为:RK1SD3-1010,
其重要参数如表2.2所示:
表2.2 齿条RK1SD3-1010参数
形状 | 长度 L(mm) | 模数(M)/圆周齿距(P) | 齿宽 B(mm) | 齿数(齿) | 齿条高度 H(mm) |
[角型齿条] 00007 | 303~306 | 1 | 10 | 94 | 10 |
经选型齿轮和齿条,齿轮的分度圆直径为75mm,由上计算可得,假如想要驱动座椅左右运动,则齿轮所受圆周力为460N,
由公式
经验算,其小于所选定齿轮所能承受的最大转矩。
2.1.2 减速机的选型
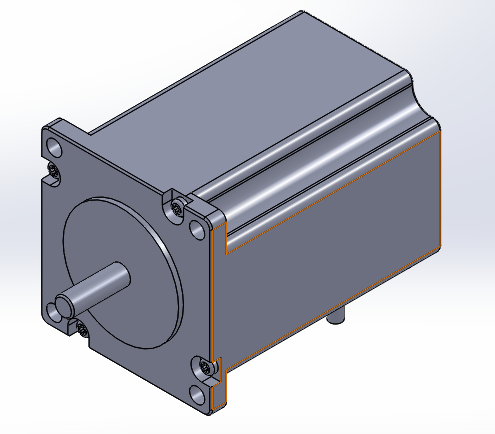
由上可知,减速机的输出扭矩要大于17.25,因此减速器选用型号为HTF60-20--04A其重要参数如表2.3所示:
表2.3 减速机HTF60-20--04A模型参数
种类 | 减速比 | 安装 分类 | 级数 | 额定输出力矩(N·m) | 最大输出力矩(N·m) | 效率 | 输出轴装置 |
行星齿轮 | 20 | 法兰型 | 二级 | 44 | 88 | 0.94 | 同轴 |
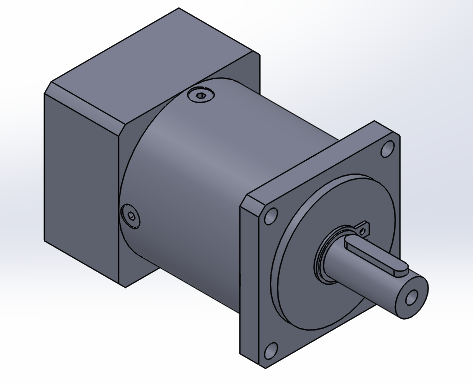 其三维模型如图2.5所示:
其三维模型如图2.5所示:
图2.5 减速机HTF60-20--04A模型
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: