内河船舶异常轨迹实时探测方法研究与实现毕业论文
2020-02-16 22:49:08
摘 要
随着内河航运的蓬勃发展,目前,全国形成了以长江、珠江、京杭运河、淮河、黑龙江和松辽水系为主体的内河航运布局。但随着内河航运的业务日益增加,内河航运的通航环境变得愈加复杂,影响船舶通航的因素不断增加,导致船舶碰撞等事故发生的更加频繁,最终导致人力物力的损耗以及生态环境的破坏,现在如何保障内河船舶航行安全成为了亟待解决的问题。目前,大多数船舶轨迹异常检测模型还停留在运用聚类等传统方法对轨迹的异常性进行判断,但这些模型受限程度较高,已经很难应对当今繁杂的内河交通情形。
高精度模型的训练需要丰富的数据支持。相对传统雷达设备等,AIS 设备拥有受地形天气影响小,高定位精度等优点,且可以提供更丰富的船舶轨迹特征数据。本文基于 AIS 数据样本,结合神经网络和深度学习,研究适用于船舶异常轨迹检测的算法模型。并通过驻点检测以及曲线拟合的方法对深度学习网络预测结果进行校正。最终实现了实时的异常轨迹的检测。
本文的主要主要研究工作如下:
1. 利用循环神经网络中的长短期记忆模型,通过调整模型中隐藏层神经元个数,学习次数等参数,建立了一个具有较好效果的实时轨迹预测模型。并利用真实AIS数据对模型进行测试,证明了该预测模型的有效性。本文提出的异常检测方案基于RNN-LSTM网络的预测结果。
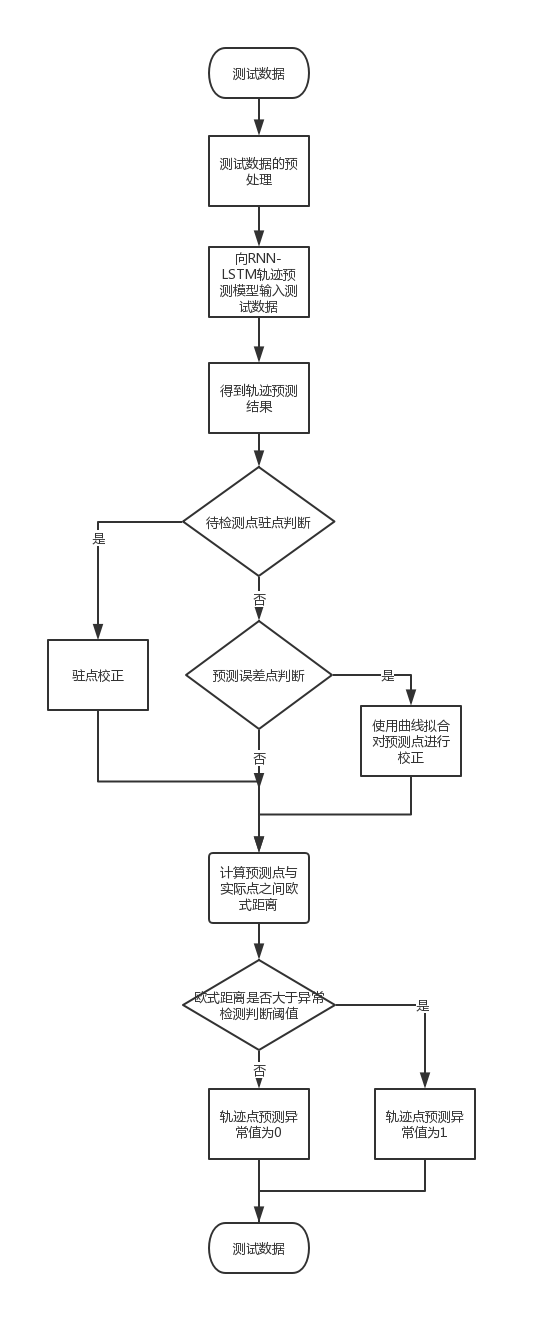
2. 分析了深度学习网络进行航迹预测时误差的引起因素,并针对误差引起因素提出了驻点的检测方案以及基于曲线拟合的航迹校正方案。本文还讨论了在船舶轨迹异常检测领域对于异常数据的定义,最后提出了一种切实可行的异常检测方法。
3.应用了针对异常检测结果的几种评价指标,利用长江南京航段AIS数据对异常检测模型进行测试,并利用异常检测评估指标对结果进行评估,同时比较了长江段基于聚类的异常检测模型,验证了本文模型的优越性。
结果表明,利用驻点检测以及曲线拟合的方法对RNN-LSTM模型的预测校正实现了较好的预测效果,通过异常检测指标评估,验证了所提出方法的有效性。
关键字:深度学习网络,长短期记忆模型,轨迹预测校正,异常船舶轨迹检测
ABSTRACT
With the vigorous development of inland navigation, the layout of inland navigation with the Yangtze River, Pearl River, Beijing-Hangzhou Canal, Huaihe River, Heilongjiang River and Songliao Water System has been formed. However, with the increasing business of inland navigation, the navigation environment of inland navigation has become more complicated, and the factors affecting the navigation of ships have been increasing, resulting in more frequent accidents such as ship collisions, which ultimately lead to the loss of manpower and material resources and the destruction of the ecological environment. How to ensure the safety of vessels has become an urgent problem to be solved. At present, most ship trajectory anomaly detection models still use traditional methods such as clustering to judge the anomaly of trajectories. However, these models are highly restricted and it is difficult to cope with the complicated inland river traffic situation.
The training of high-precision models requires rich data support. Compared with traditional radar equipment, AIS equipment has the advantages of small influence on terrain weather and high positioning accuracy, and can provide more abundant ship trajectory characteristic data. Based on AIS data samples, combined with neural network and deep learning, this paper studies the algorithm model applicable to ship anomaly trajectory detection. The depth learning network prediction results are corrected by stagnation point detection and curve fitting. Finally, real-time detection of abnormal trajectories is realized.
The main research work of this paper is presented as follows:
1. Using the long-term and short-term memory model in the recurrent neural network, a real-time trajectory prediction model with good effects is established by adjusting the number of hidden layer neurons and the number of learning times in the model. The model is tested with real AIS data, which proves the effectiveness of the prediction model.
2. The factors causing the error of the deep learning network for track prediction are analyzed. The detection scheme of the stagnation point and the track correction scheme based on curve fitting are proposed for the error-causing factors. This paper also discusses the definition of anomaly data in the field of ship trajectory anomaly detection, and finally proposes a practical anomaly detection scheme.
3. This paper proposes several evaluation indicators for the anomaly detection results. After that, the anomaly detection model is tested by using the AIS data of the Nanjing section, and the results are evaluated by using the evaluation indicators.
The results show that the stagnation point detection and curve fitting method can achieve better prediction results for the prediction of RNN-LSTM model. By comparing the corresponding anomaly detection evaluation indicators, the model's anomaly detection effect is effectively evaluated for inland navigation. This paper is dedicated to improve the safety of inland vessel transportation.
KEYWORD:Deep learning network, LSTM, Predicted Trajectory Correction, Abnormal Vessel Trajectory Detection
目 录
第1章 绪论 1
1.1 研究背景及意义 1
1.2 国内外研究现状 2
1.2.1 国内研究现状 2
1.2.2 国外研究现状 2
1.3 本文主要工作 3
1.4 论文的组织结构 4
1.5 本章小结 5
第2章 基于RNN-LSTM的船舶轨迹预测 6
2.1 循环神经网络以及长短期记忆 6
2.1.1 循环神经网络(RNN)简介 6
2.1.2 长短期记忆(LSTM)简介 7
2.2 RNN-LSTM训练算法 8
2.3 基于RNN-LSTM的内河船舶轨迹预测模型 10
2.4 RNN-LSTM的内河船舶轨迹预测模型参数设置 11
2.4.1 数据的归一化 11
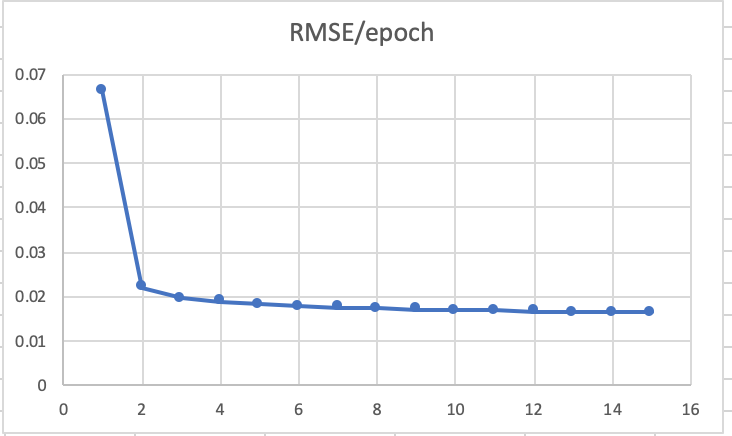
2.4.2 学习次数 12
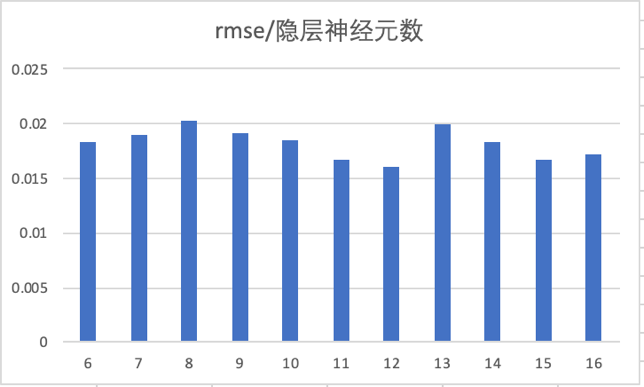
2.4.3 隐含层神经元个数选择 12
2.5 实验结果及分析 12
2.5.1 实验环境与数据 12
2.5.2 实验方案与评价指标 13
2.5.3 实验结果及分析 14
2.6 本章小结 16
第3章 基于曲线拟合的轨迹预测校正与异常轨迹检测方法 17
3.1 LSTM网络预测误差分析 17
3.1.1 RNN-LSTM网络误差产生原因 17
3.1.2 网络预测误差点判断 17
3.1.3 驻点判断 18
3.2 基于曲线拟合和驻点检测的轨迹校正 18
3.2.1 曲线拟合介绍 18
3.2.2 曲线拟合校正方案 19
3.2.3 驻点校正方案 20
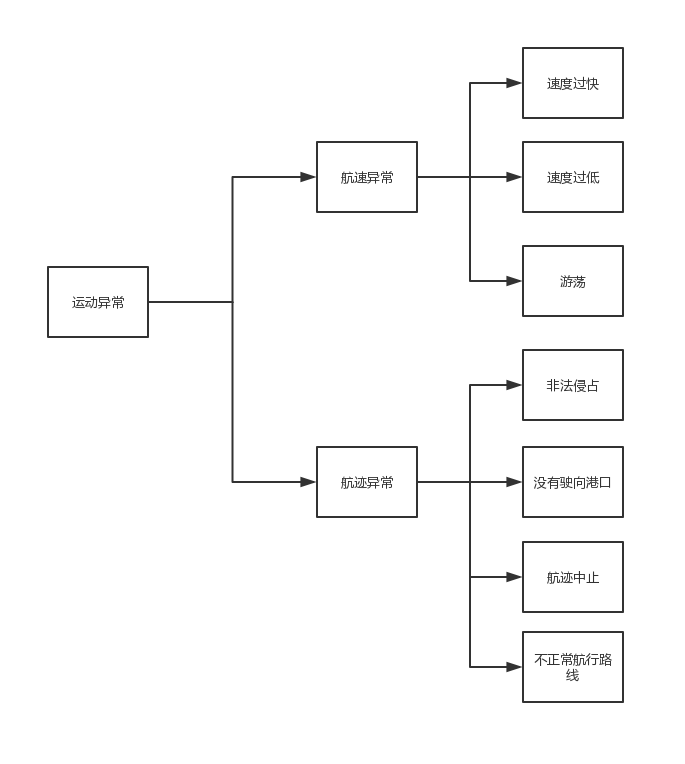
3.3 船舶异常行为定义 20
3.3.1 船舶运动异常 20
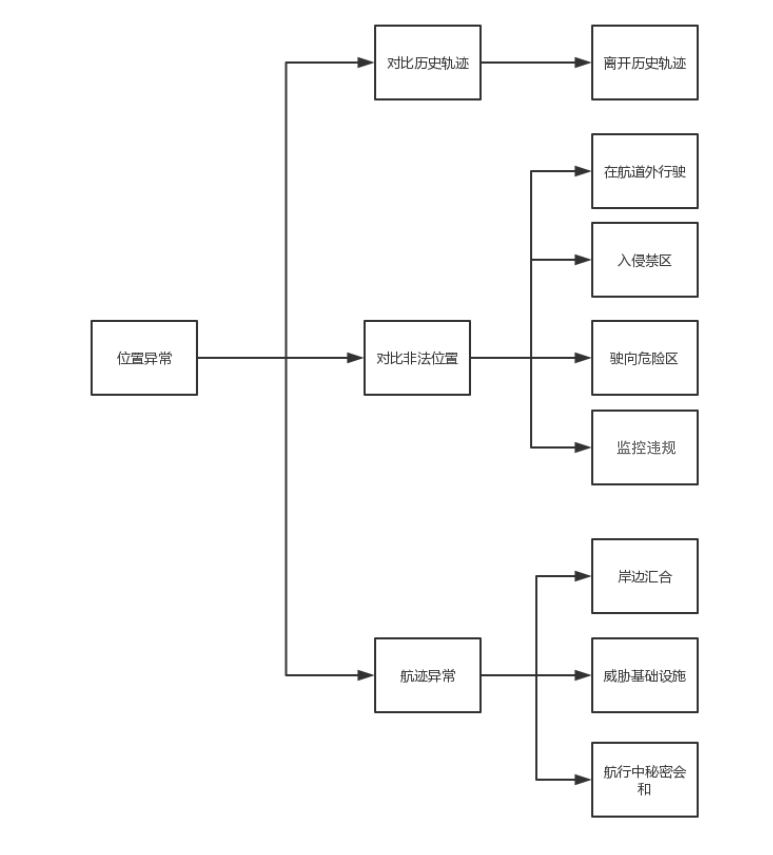
3.3.2 船舶位置异常 21
3.4 异常轨迹检测方案 22
3.4.1 轨迹点相似性度量 22
3.4.2 检测方案 23
3.5 本章小结 25
第4章 异常轨迹检测实验结果及分析 26
4.1 实验环境与数据 26
4.2 实验结果评判指标 26
4.3 实验结果与分析 28
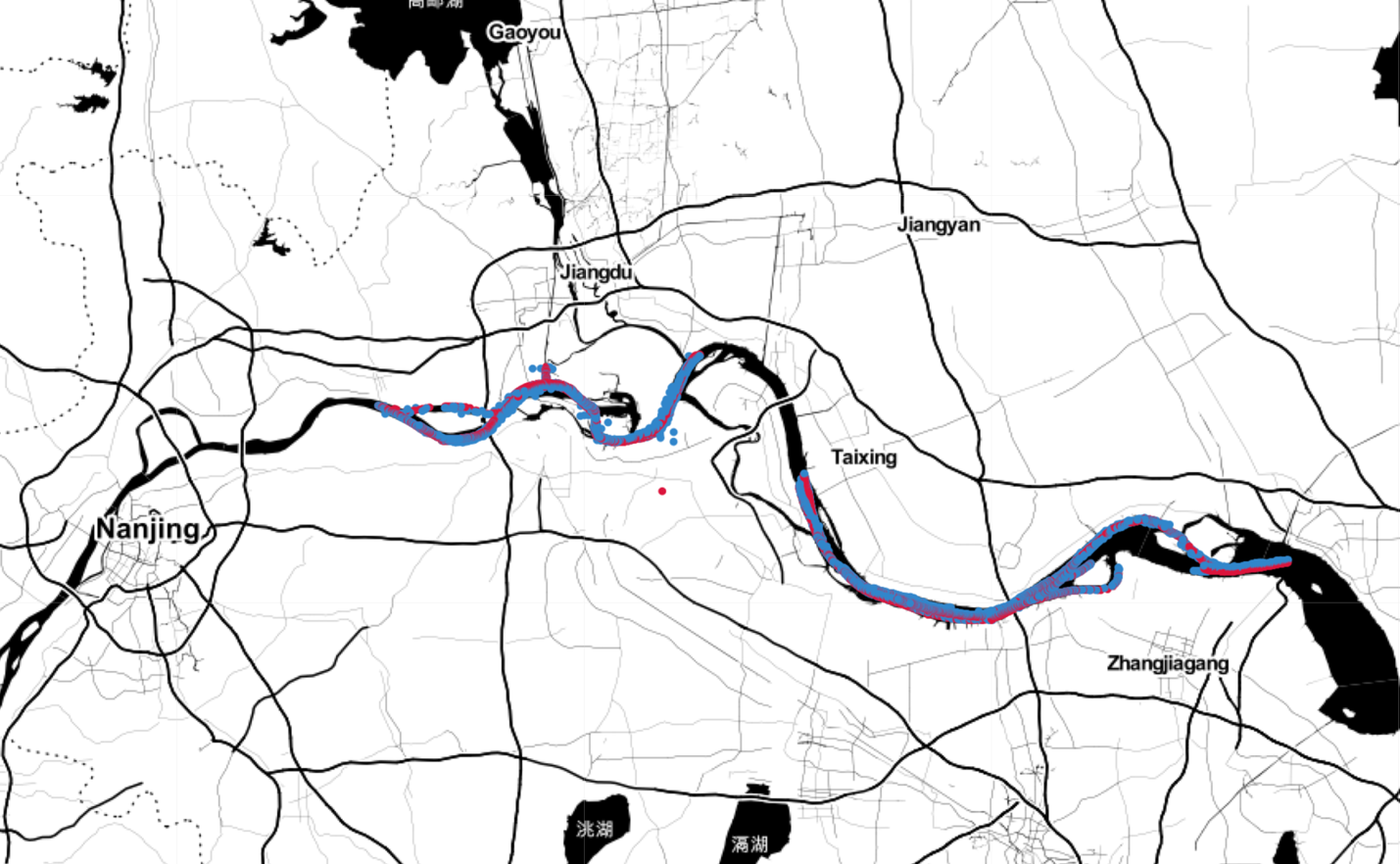
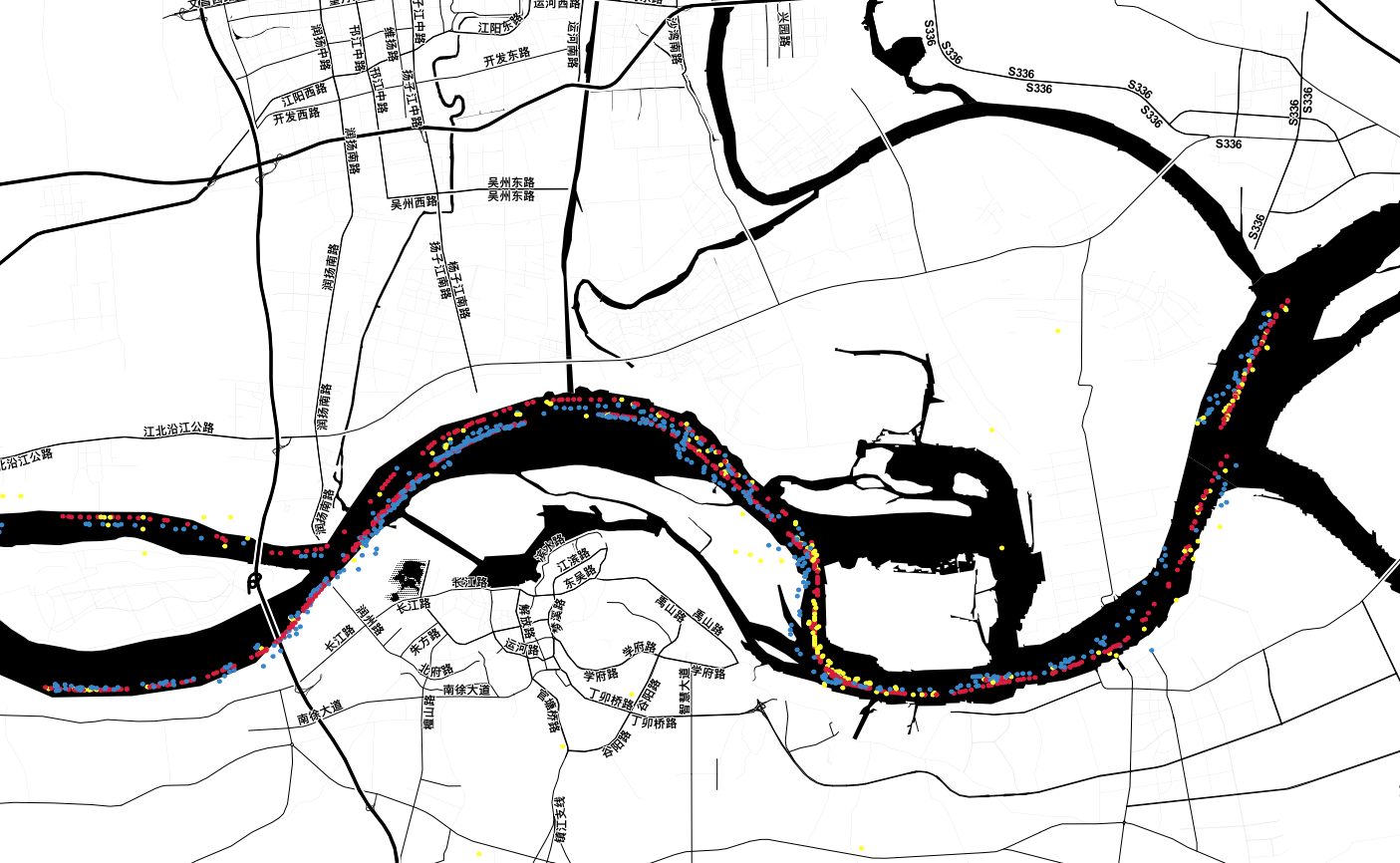
4.3.1 轨迹的可视化 28
4.3.2 实验结果与分析 29
4.4 本章小结 33
第5章 总结与展望 34
5.1 论文工作总结 34
5.2 展望 34
参考文献 36
致 谢 37
绪论
研究背景及意义
内河航运是人类交通运输史中最为古老的运输方法之一,内陆地区和沿海地区通过内河航运实现迅捷的交流与贸易。相较于公路运输,航空运输等方式,内河航运有着运量大、能源消耗少、成本低、污染低等优势。目前,全国形成了以长江、珠江、京杭运河、淮河、黑龙江和松辽水系为主体的内河航运布局。
但随着内河航运的业务日益增加,内河航运的通航环境变得愈加复杂,影响船舶通航的因素不断增加,导致船舶碰撞等事故发生的更加频繁,最终导致人力物力的损耗以及生态环境的破坏,现在如何保障内河船舶航行安全成为了亟待解决的问题。为了保障船与船以及船与基站之间的便捷交流,船舶自动自动识别系统(Automatic Identification System,简称AIS)和全球定位系统(Global Positioning System,简称GPS)得到了普及,如今各地海事管理部门的电子海图系统每天都会接收到海量的AIS数据,但是这些AIS并没有被充分利用。现在如何利用已有的AIS数据进行分析,建立船舶正常轨迹的模型,并最终实现对内河船舶异常轨迹进行实时探测,是目前水上交通安全领域的研究热点之一。
本项目的是利用大量的电子海图系统收集到的AIS数据建立一个基于深度学习网络的船舶轨迹数据模型,并利用该轨迹模型实现实时的轨迹检测。
近年来,随着国内内河水运的发展,内河水运交通量一直保持增长,船舶在运行的过程中产生了极为大量的时空轨迹,通过对这些轨迹数据进行挖掘分析,可以帮助河道以及港口管理人员进行船舶行为的管理,并为海事监管、交通服务、海事调查,企业的航运决策、船队跟踪、船舶引航以及科研机构的数据研究提供帮助。
本文希望通过通过利用已有的AIS数据,依托TensorFlow平台建立一个基于循环神经网络的长短期记忆模型完成对正常船舶行驶轨迹的学习,然后根据已有建模完成对于船舶未来轨迹的预测从而实现实时的异常船舶轨迹检测。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: