基于CNN和SVM的船舶识别方法研究与实现毕业论文
2020-02-16 22:34:56
摘 要
计算机技术快速发展的今天,深度学习已经在各个领域得到应用,目标检测更是其中的研究热点。将此技术应用于船舶领域,实时对周边水域的船舶进行检测,将使船员能够在航行过程中监控周围环境,对危险情况提前预警,从而保障航行安全。本文结合船舶特点,利用卷积神经网络对船舶的实时识别与分类进行深入研究,分析和总结了前人的工作成果,并在此基础上进行了新的目标识别与分类模型研究,完成如下工作:
(1)结合one-stage方法的思想,参考YOLO,SSD模型的特点,构建了One-Ship-Net模型。利用DarkNet-53作为主干网络,FPN网络融合多层次特征提高网络精度,并且利用K-Means聚类算法分析数据集中船舶的尺寸特点,得到更为科学的包围框预设值。最后对比了通过去除和添加FPN层测试FPN网络对于识别效果的影响。
(2) 对two-stage方法中的代表模型—Faster R-CNN进行改进,提出了Ship-R-CNN模型。首先,改进原有的Faster R-CNN主干网络的结构,从而提升了模型的检测速度。在训练阶段,单张图片耗时减少了约25ms,在测试阶段单张图片耗时减少了约14ms;其次,通过分析数据集中船舶尺寸的特点改进了包围框的预设值,提升了模型对于小目标的检测能力,最终使MAP值上升了2.6%。
(3)采集江苏省仪征市与湖北省武汉市长江段部分水域的船舶视频监控数据,对两个模型进行训练,并且对两个模型进行横向对比。实验结果表明,Ship-R-CNN比One-Ship-Net的识别准确度度更高,MAP约高4.8%,而One-Ship-Net的速度远高于Ship-R-CNN,单张图片检测耗时约少112ms。通过两种模型的结构分析其原因,One-Ship-Net针对整个特征图进行一次检测,这个过程类似于Ship-R-CNN的RPN网络,只是RPN网络只区分前景和背景。Ship-R-CNN通过两次检测提高了准确度,但同时也牺牲了速度;One-Ship-Net仅通过一次检测,获得了速度优势,但是网络结构设计上需要更多的技巧。
关键词:船舶识别;one-stage方法;two-stage方法;CNN;视频监控
Abstract
With the rapid development of computer technology, deep learning has been applied in various fields, and target detection is a research hotspot. Applying this technology to the ship field, real-time detection of ships in the surrounding waters will enable the crew to monitor the surrounding environment during the voyage and provide early warning of dangerous conditions to ensure navigation safety. Based on the characteristics of the ship, this paper uses the convolutional neural network to conduct in-depth research on the real-time identification and classification of ships, analyzes and summarizes the work results of the predecessors, and on this basis, carries out a new target recognition and classification model research, and completes the following work:
(1) Combining the idea of one-stage method, with reference to the characteristics of YOLO and SSD model, the One-Ship-Net model is constructed. Using DarkNet-53 as the backbone network, FPN network integrates multi-level features to improve network accuracy, and uses K-Means clustering algorithm to analyze the size characteristics of ships in datasets, and obtain more scientific bounding box preset values. Finally, the effect of testing the FPN network on the recognition effect by removing and adding the FPN layer is compared.
(2) The representative model of the two-stage method, Faster R-CNN, is improved, and the Ship-R-CNN model is proposed. First, improve the structure of the original Faster R-CNN backbone network, thus improving the detection speed of the model. In the training phase, the time taken for a single picture is reduced by about 25ms, and the time taken for a single picture in the test phase is reduced by about 14ms. Secondly, by adjusting the characteristics of the size of the ship in the data set, the preset value of the bounding box is improved, and the model is improved. The detection ability of the small target eventually increased the MAP value by 2.6%.
(3) Collect video surveillance data of ships in Yizheng City of Jiangsu Province and part of the waters of the Yangtze River section of Wuhan City, Hubei Province, train the two models, and compare the two models horizontally. The experimental results show that Ship-R-CNN has higher recognition accuracy than One-Ship-Net, MAP is about 4.8%higher, and One-Ship-Net is much faster than Ship-R-CNN, single image detection. It takes about 112ms less time. Through the structural analysis of the two models, One-Ship-Net performs a test on the entire feature map. This process is similar to the Ship-R-CNN RPN network, except that the RPN network only distinguishes between foreground and background. Ship-R-CNN improves accuracy through two tests, but at the same time sacrifices speed; One-Ship-Net gains speed advantage with only one inspection, but requires more skill in network structure design.
Keywords: ship identification; one-stage method; two-stage method; CNN; video surveillance
目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1 研究背景与意义 1
1.2 国外研究现状 1
1.3 国内研究现状 2
1.4 本文研究内容 2
1.5 论文组织结构 4
第2章 基于one-stage方法的船舶识别与分类 5
2.1 引言 5
2.2 相关知识概述 5
2.2.1 残差网络 5
2.2.2 FPN网络 6
2.2.3包围框回归 6
2.3 One-Ship-Net模型的网络架构 7
2.3.1 One-Ship-Net模型的整体架构 7
2.3.2 主干网络 7
2.2.3 FPN网络 8
2.2.4 输出层 9
2.4 基于One-Ship-Net模型的船舶识别与分类方法 9
2.4.1包围框回归计算 9
2.4.2 基于K-Means算法的船舶尺寸聚类 11
2.4.3船舶目标识别与分类 11
2.5 网络训练及实验结果分析 13
2.5.1 损失函数 13
2.5.2 网络训练 14
2.5.3 极大值抑制算法的阈值确定 15
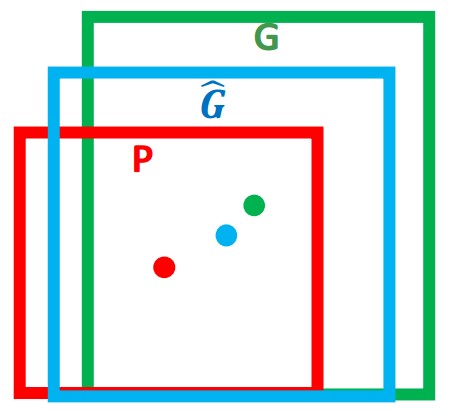
2.5.4 评价标准 16
2.5.5 实验结果及分析 17
2.6 本章小结 19
第3章 基于two-stage方法的船舶识别与分类研究 20
3.1 引言 20
3.2 相关知识概述 20
3.2.1 Faster R-CNN的结构 20
3.2.2 区域建议网络(RPN) 20
3.2.3 ROI Pooling 20
3.3 Ship-R-CNN模型的网络结构 21
3.4 基于Ship-R-CNN模型的船舶识别与分类方法 22
3.4.1 获取特征图 22
3.4.2 获取目标区域建议 22
3.4.3 建议区域的再检测 23
3.5 网络训练及实验结果分析 24
3.5.1损失函数 24
3.5.2 网络训练 25
3.5.3 实验结果及分析 25
3.6 本章小结 27
第4章 实验结果与分析 28
4.1 数据来源与预处理 28
4.1.1 实验环境 28
4.1.2 数据来源 28
4.1.3 数据预处理 29
4.2 One-Ship-Net模型与Ship-R-CNN模型对比实验 31
4.2.1 识别与分类效果对比 31
4.2.2 运行效率对比 35
4.2.3 实验结果分析 35
4.3本章小结 35
第5章 总结与展望 36
5.1总结 36
5.2 展望 36
参考文献 37
致 谢 39
第1章 绪论
1.1 研究背景与意义
随着世界海洋运输行业的高速发展,国家之间的货物运输主要通过海洋运输,海洋运输行业对于一个国家的经济发展影响巨大。我国作为一个海洋大国,管辖近300万平方公里的海域面积,接近我国陆地领土面积的三分之一,同时我国内陆有着上百条内陆河,其中以长江为代表,长江经济带覆盖上海、江苏、浙江、安徽、江西、湖北等11个省市。由此可见,发展水上运输业对于推动我国经济发展至关重要。然而,水上交通日益繁忙,时常发生运输安全事件,这将对人民生命安全和社会经济造成重大损失,所以对船舶识别与分类方法进行研究是具有重要的理论与实际应用价值,不仅如此,船舶识别技术为准确定位目标也有军事上的重要意义。
现阶段,船舶常搭载雷达或者红外成像设备实现对周围船舶的检测工作,但是这两项设备价格较高,普通渔船或小型船只难以承受其费用,另一方面,操作和维修涉及专业领域的知识,所以导致这两种手段在民用领域难以普及。
近年来,机器学习发展迅速,其中卷积神经网络(CNN)已在图像识别和分类领域取得极大成功,基于卷积神经网络的物体检测方法已经被用于许多应用中,比如人脸识别。在2017年的ImageNet图像分类竞赛中,基于CNN的图像识别方法分类错误率已经低于人类,这也说明将CNN应用到船舶识别与分类上是可行的,但是一般对不相同类的目标进行识别与分类,对于单属性类的多目标识别与分类的研究相对较少,特别是对监控视频中船舶的识别与分类,而现有的研究多是对图像中的船舶目标进行识别检测。在此背景下,本文提出使用卷积神经网络和计算机视觉领域的算法和技术实现对视频监控中的船舶识别与分类,达到能够实时的监测周边水域船舶的效果。
1.2 国外研究现状
由文献[9]、[14]、[15]可知国外研究者们的主要成果:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: