基于卷积神经网络的车辆检测模型设计及实现毕业论文
2020-02-16 12:13:01
摘 要
随着汽车持有量的大量增加,道路交通量不断增大,为了维护良好的交通秩序,减少交通事故的发生,需要有良好的交通系统;车辆检测作为智能交通系统中的重要部分,一直备受国内外研究人员的关注;但是传统的人为提取车辆特征对环境依赖性高,检测精度低,鲁棒性及泛化性较差,基于深度学习的卷积神经网络能够自动提取目标特征进行训练,目前被大量应用到目标识别,目标检测和语音识别等领域中。本文对基于卷积神经网络的Faster-RCNN模型进行研究,设计并实现车辆检测模型,本文所做的主要工作如下:
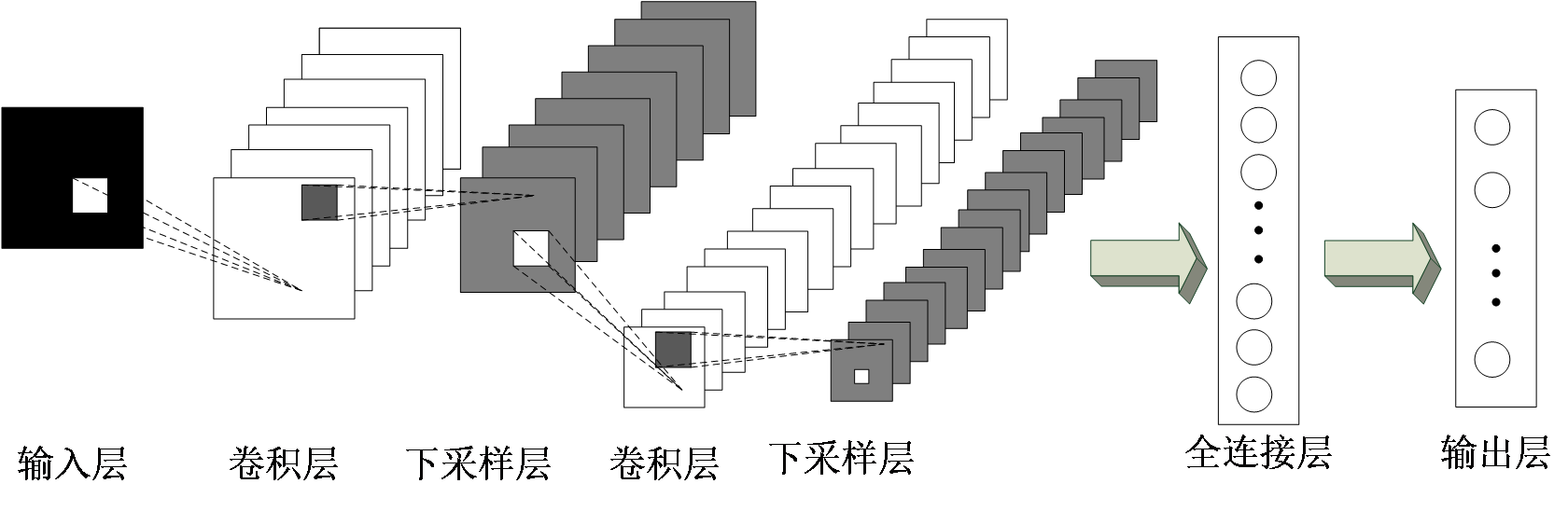
(1)本文对比了传统的车辆检测算法与基于卷积神经网络的车辆检测算法,介绍了卷积神经网络的概念和结构,分析了卷积层,池化层和全连接层的原理及计算过程。
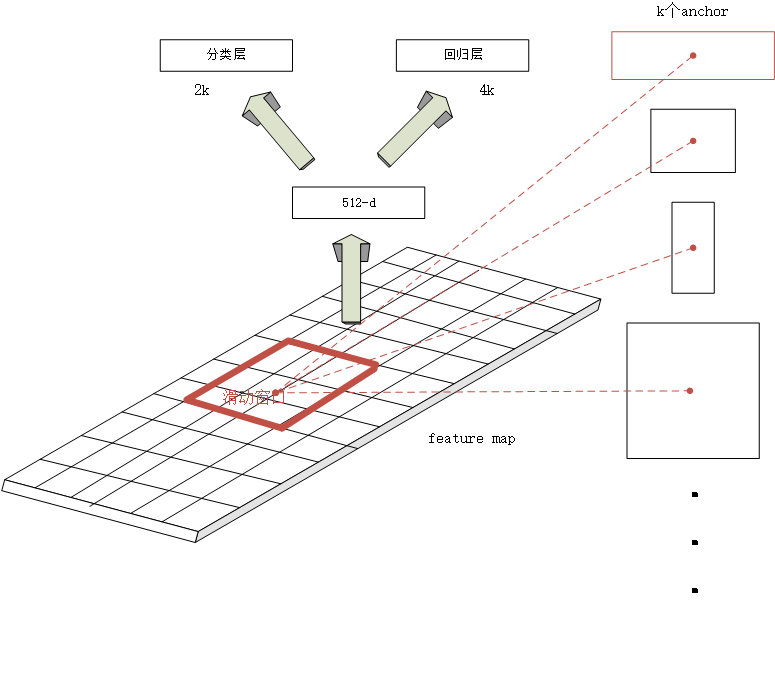
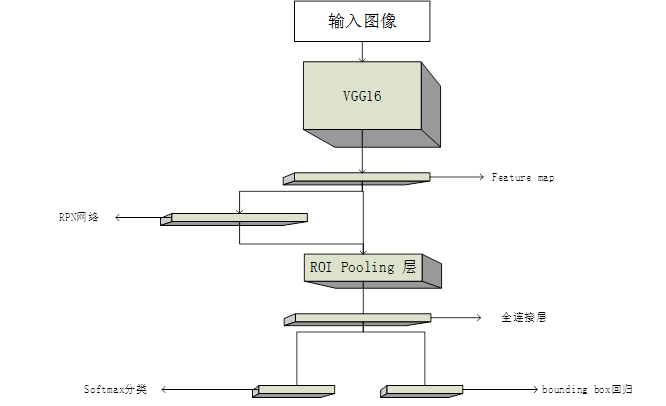
(2)本文分析了基于卷积神经网络的Faster-RCNN算法,并基于Faster-RCNN算法设计了一个车辆检测模型,该模型将RPN网络和Fast-RCNN算法相结合,经过样本训练,候选框生成,特征提取和边框输出的过程,真正实现了端到端的检测,缩短了候选框的生成时间,提高了车辆检测的效率。
(3)本文从VOC2007数据集中提取出带有车辆的图片作为数据集,使用Tensorflow深度学习框架对基于Faster-RCNN的车辆检测模型进行设计及实现,分析了迭代次数对模型检测精度的影响,通过检测不同场景下的车辆图片来验证模型的精度,最终的试验结果表明该模型具有较高的精度,能够满足道路上的车辆检测需求。
关键词:卷积神经网络;Faster-RCNN;车辆检测
Abstract
With the increase of the number of cars, the amount of road traffic is increasing. In order to maintain good traffic order and reduce traffic accidents, It is important for us to have a good traffic system. Vehicle detection is concerned by researchers at home and abroad because it is an important part of the intelligent transportation system. However, the vehicle features was extract- ed by people last years, so it has high environmental dependence, low detection accuracy, poor robustness and generalization. Deep learning based convolutional neural network can automatically extract object features for training. It is being widely applied in the fields of target recognition, target detection and speech recognition currently. In this thesis, the Faster-RCNN model based on convolutional neural network is studied to design and implement a vehicle detection model. The main work of this thesis is as follows:
(1) The traditional vehicle detection algorithm is compared with the vehicle detection algorithm base on convolutional neural network. the concept and structure of convolutional neural network is introduced, the principle and calculation process of convolutional layer, pooled layer and fully connected layer is analyzed.
(2) The Faster-RCNN algorithm based on convolutional neural network is analyzed, and a vehicle detection model based on Faster-RCNN algorithm is designed. This model combines RPN network and Fast-RCNN algorithm, through sample training, candidate frame generation, feature extraction and the border box output, it real realize end-to-end detection, decreaces the time in the generation of region proposal, and improves the efficiency of vehicle detection.
(3) We use the image with vehicle from the VOC2007 dataset as the data set. We use the Tensorflow deep learning framework to design and implement the vehicle detection model based on Faster-RCNN. We analyze different iterations on the accuracy of the model detection. and verify the accuracy of the model in different scenes by detecting the vehicle images. The final experimental results show that the model has high accuracy and can meet the need of vehicle detection in road.
Key Words: Convolutional neural network; Faster-RCNN; Vehicle detection
目 录
第1章 绪论 1
1.1 课题研究背景及意义 1
1.2 国内外研究现状 1
1.2.1 深度学习的研究现状 1
1.2.2 车辆检测的研究现状 2
1.3 研究内容及论文安排 3
第2章 卷积神经网络的相关理论 4
2.1 卷积神经网络概述 4
2.2 卷积神经网络的结构 4
2.2.1 输入层 4
2.2.2 卷积层 5
2.2.3 池化层 5
2.2.4 全连接层 6
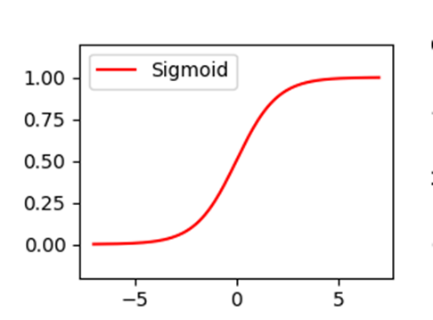
2.3 激活函数 6
2.4 卷积神经网络的训练 7
第3章 Faster-RCNN模型的设计 9
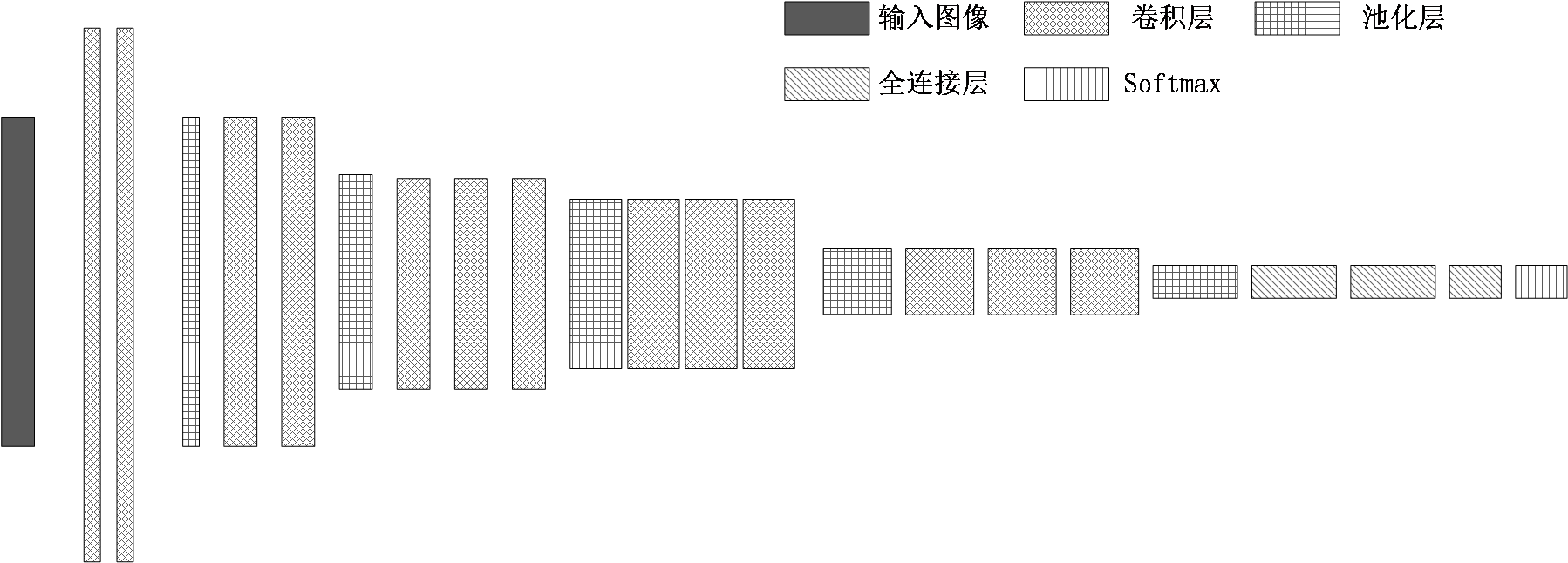
3.1 VGG16网络模型 9
3.2 候选框提取网络 10
3.3 区域建议的损失函数 11
3.4 非极大值抑制 11
3.5 Faster-RCNN模型的检测过程 12
第4章 基于Faster-RCNN的车辆检测模型的实现 13
4.1 实验环境配置 13
4.2 Pascal VOC数据集 13
4.3 模型训练 13
4.3.1 参数设置 13
4.3.2 训练过程 14
4.4 实验结果与分析 14
第5章 总结与展望 19
5.1 总结 19
5.2 展望 19
参考文献 21
致谢 23
第1章 绪论
1.1 课题研究背景及意义
近年来,随着人们收入的提高以及城市建设步伐的加快,我国机动车持有量极大地增加,道路交通量随之增加,进而给道路交通带来了极大的压力;更容易出现如交通堵塞,交通事故等交通安全问题,不利于城市智能化的发展;为了减少交通事故的发生,提高人民的生活质量,加快智慧化城市的建设,智能交通系统应运而生。
智能交通系统(Intelligent Traffic System,ITS)[1]将先进的计算机技术,传感器技术,信息技术,人工智能等先进技术综合运用于交通运输体系中, 将道路驾驶中的三个关键因素(车辆,道路和驾驶者)融合在一起来考虑当前的道路交通问题,增强三个因素之间的相互联系,从而产生一种保障安全,高精度,高效率的综合运输系统,提高总体交通管理水平,改善我国当前的交通安全和服务质量,降低环境污染。
车辆检测是智能交通系统中不可或缺的基础环节,车辆的检测与追踪是智能交通系统中重要的核心环节,对于智能交通系统有着关键性的作用;要进行后续的车辆追踪,车牌检测等功能,必须要进行车辆检测。它通过对照片或者视频中当前道路上的车辆进行识别检测,智能化处理获得我们需要的信息,如道路当前的车流量,道路的实时占有率,对道路上的车辆进行大致的分类等等,从而对整个道路进行准确的判断,及时提供路况,保证交通系统的正常运行,在一定程度上减少交通事故的发生。
传统的车辆检测算法主要是手工提取车辆特征,对于设计人员的依赖性比较强,不适应环境的变化,对于背景多变的图片的识别率也比较低,鲁棒性较差且泛化能力不强;随着深度学习和卷积神经网络方法的提出,这些问题有了解决的方法,不同于传统车辆检测算法通过特征算子对候选区域提取特征,基于深度学习的卷积神经网络(Convolutional Neural Networks, CNN)算法能够自动的学习并提取图像中的特征,解决了传统方法的人为提取特征问题,对于背景的变换,形状的变化不敏感,具有更高的泛化性,而且速度较快,精度较高,抗干扰能力强,因此基于卷积神经网络的车辆检测对于智能交通系统的发展有着重要的意义。
1.2 国内外研究现状
1.2.1 深度学习的研究现状
深度学习[2]是一种特殊的机器学习方式,它采用数据驱动的方法,通过非线性变换对数据特征进行提取,自动地提取数据所需要的重要特征,从而使得机器能够仿照人类神经一样具有分析处理的能力,让特征的获取具有更高的泛化性。
2006年Hinton[3]等人在Science上发表的关于神经网络概念的文章,第一次提出了深度学习这一概念,并证明了深度学习可以应用在图像处理等方向上,这一理念的提出让更多的学者把眼光放到深度学习上,并将深度学习的使用扩展到不同的领域上。
近年来,随着计算机技术的创新发展,深度学习开始在各个领域发挥着它的作用;微软研究人员Li[4]等人在Switchboard数据集上对隐马尔可夫混合模型(CD-DNN-HMM)进行测试,测试得到得字词错误率较传统的系统降低了20%-30%,大大降低了语音识别的误检率,在语音识别上取得了重要的突破。
在图像识别和目标检测领域,2012年Alex Krizhevsky[5]和他的团队将卷积神经网络运用到图像分类和目标识别中,在ImageNet(Image Net large scale visual recognition competition, ILSVRC)比赛中获得了图像分类和目标检测的第一,他所应用的卷积神经网络模型具有8层深度,分别为五层卷积层和三层全连接层,降低了图像分类的错误率,前5项的错误率达到了15.3%,比第二名低了10.9%; 2013年的ILSVRC比赛中,M.D.Zeiler[6]和他的团队提出了ZF Net网络,该网络通过反卷积网络对中间层的特征进行可视化,大大降低了网络所训练的数据,并且前5项的错误率达到了11.7%,相较于Alex Net网络有了进一步的提升;2014年的ILSVRC比赛中,GoogleLeNet[7]小组提出的多尺度的模型获得了图像分类小组的的第一,其前5项错误率达到了6.7%,该小组提出的网络模型的网络层数达到了22层,增加了网络的中间层数量,将模块的卷积层和池化层并行处理,降低了Alex Net的参数数量;2015年的ILSVRC比赛中,He[8]和他的团队提出了网络深度高达152层的深度残差网络(ResNet),最终的图像分类前五项错误率达到了3.57%,甚至低于人类错误率5.1%,比之前的网络模型都更加成功,由此可见深度学习在图像识别方向取得了突破性的进展。
在目标检测领域,Girshick R[9]等人使用R-CNN算法进行目标检测,通过卷积核(滤波器)对输入的神经元进行局部特征提取,利用选择性搜索算法(Selective Search)来进行候选框的生成,能够使用较少的训练数据达到高精度的训练效果;Shafiee M J[10]等人使用YOLO方法进行目标检测能够提高检测速率和背景的误检率,提高了传统方法的适应性和检测的准确率,实现了端到端的检测。
1.2.2 车辆检测的研究现状
车辆检测是指利用相应的算法在图像中定位到车辆所在位置。过去人们主要使用差分图像法,边缘检测法和光流法来对车辆进行检测;差分图像法又包含帧差法和背景差分法,其中帧差法[11]是通过对比前后两帧图像中的特定像素点,相减得到的差值与阈值进行比较,其中差值小于阈值的被认为是背景;光流法[12]是通过对视频中前后帧信息进行计算,将运动着的车辆产生的光流场与背景在摄影机的运动下产生的光流场进行对比,通过它们之间的差异来对车辆进行检测;但是这些传统的方法对环境依赖性高,不能够满足复杂情况下的车辆检测。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: