基于卷积神经网络的双目相机立体匹配程序设计开题报告
2020-02-10 22:43:25
1. 研究目的与意义(文献综述)
双目视觉原指生物在双眼视野范围互相重叠下所产生的视觉,由于双眼具有瞳距,而在视网膜产生有差别但又基本相似的图像,这种视觉信号传送至大脑之后,大脑将两幅图像之间的差异进行整合,即可判断出眼睛到物体之间的距离关系。双目相机的设计借鉴了生物双目视觉的原理,它不对外主动投射光源,完全依靠拍摄的两张图片来计算深度,比较知名的产品有sterolabs 推出的 zed 2k stereo camera和point grey 公司推出的 bumblebee。
立体匹配是在双目相机拍摄的左右两幅图的重叠区域匹配三维点的过程,获得匹配的点对后即可计算其视差,依据视差理论得到的公式:
z = fb/d
2. 研究的基本内容与方案
好的立体匹配算法要能够做到尽量在最多种类的场景下有较低的视差误差,论文《pyramid stereo matching network》中提出的psmnet考虑了常见的多种场景,且运行速度和准确率都较高。psmnet包含金字塔池化层和用于整合全局上下文信息的spp模块,完整的架构如图1-1所示。
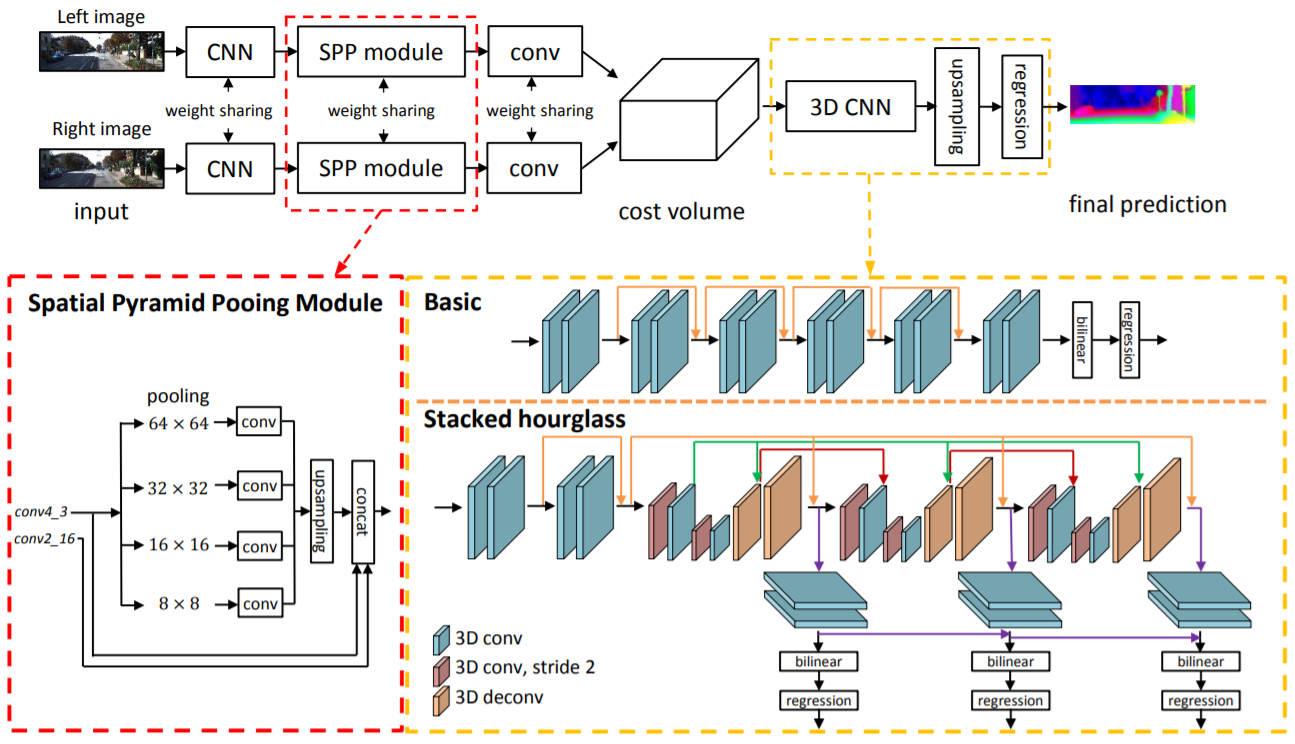
图1-1 psmnet架构
3. 研究计划与安排
(1)2019/1/19—2019/2/28;确定选题,查阅文献,外文翻译和撰写开题报告;学习pytorch框架和opencv库的使用。
(2)2019/3/1—2019/4/30;系统架构、程序设计与开发、系统测试与完善;与老师交流,迭代程序; 开始撰写毕业论文;
(3)2019/5/1—2019/5/25;撰写及修改毕业论文;
4. 参考文献(12篇以上)
[1] changj r, chen y s. pyramid stereo matching network[c]//proceedings of the ieeeconference on computer vision and pattern recognition. 2018: 5410-5418.
[2]tombari f,mattoccia s, di stefano l, et al. classification and evaluation of costaggregation methods for stereo correspondence[c]//2008 ieee conference oncomputer vision and pattern recognition. ieee, 2008: 1-8.
[3]hirschmuller h.stereo processing by semiglobal matching and mutual information[j]. ieeetransactions on pattern analysis and machine intelligence, 2008, 30(2):328-341.



