智能船舶局部路径规划的研究与仿真毕业论文
2020-02-18 00:31:14
摘 要
在计算机、互联网、传感器、通信、大数据分析、脑科学、心理学和哲学等新技术、新学科的交叉融合、共同发展下,人工智能技术应运而生。在世界各个发达国家纷纷出台政策、部署战略、培养人才的同时,我国也已充分认识到了人工智能对未来科技以及经济发展的重要性。为解决营运成本高昂、船舶操作复杂、极端海况下船员生命安全遭到威胁等问题,为满足安全、环保、经济和可靠等需求,近年来船舶与航运业不断增加对智能船舶的技术投入。为响应政府对智能船舶技术研究的号召,该文针对智能船舶智能航行研究范畴中的局部路径规划问题展开研究。本文利用遗传算法的思想,结合船舶领域模型、碰撞危险度模型等概念,并解决非线性不等式约束、算法早熟收敛等问题,设计一种局部路径规划智能算法,并对其进行仿真验证。仿真结果证明了所设计算法的可行性与有效性。
主要研究工作包括:
(1)根据避碰几何原理,提出并推导了用于计算船舶会遇过程中两个重要参数——最小会遇距离(DCPA)和到达最小会遇距离点的时间(TCPA)的公式。引用了英国学者CheeKuang Tam和Richard Bucknall的概念,建立了针对目标船位置状态下的船舶领域模型。建立了利用DCPA和TCPA加权法计算碰撞危险度系数(CRI)的船舶碰撞危险度模型。
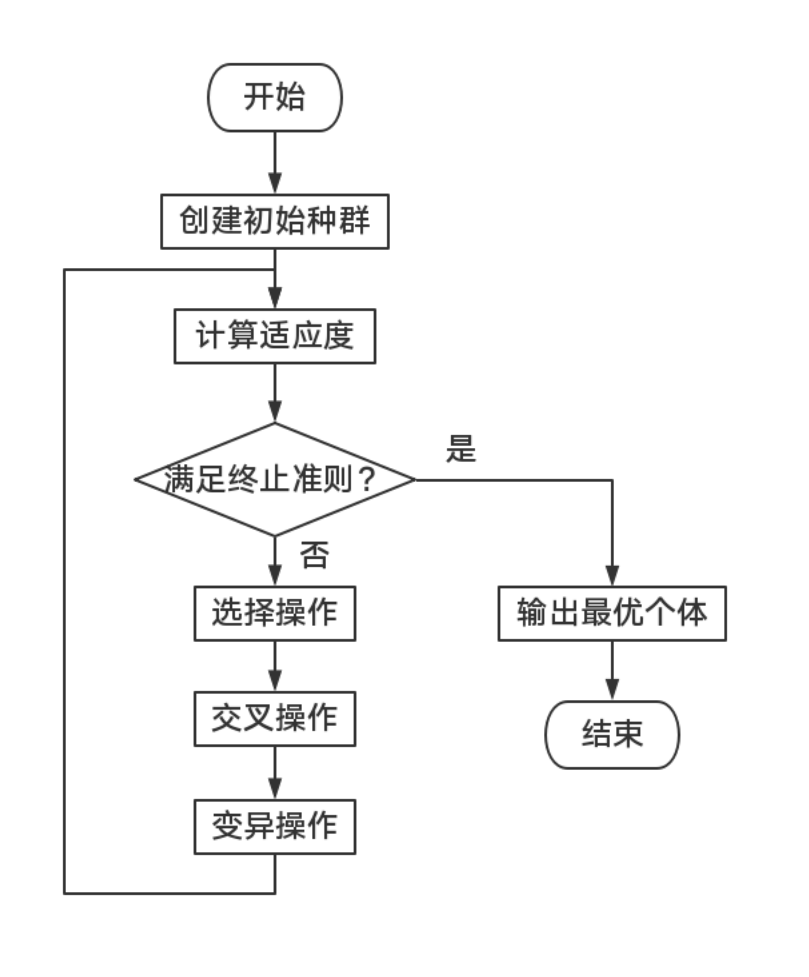
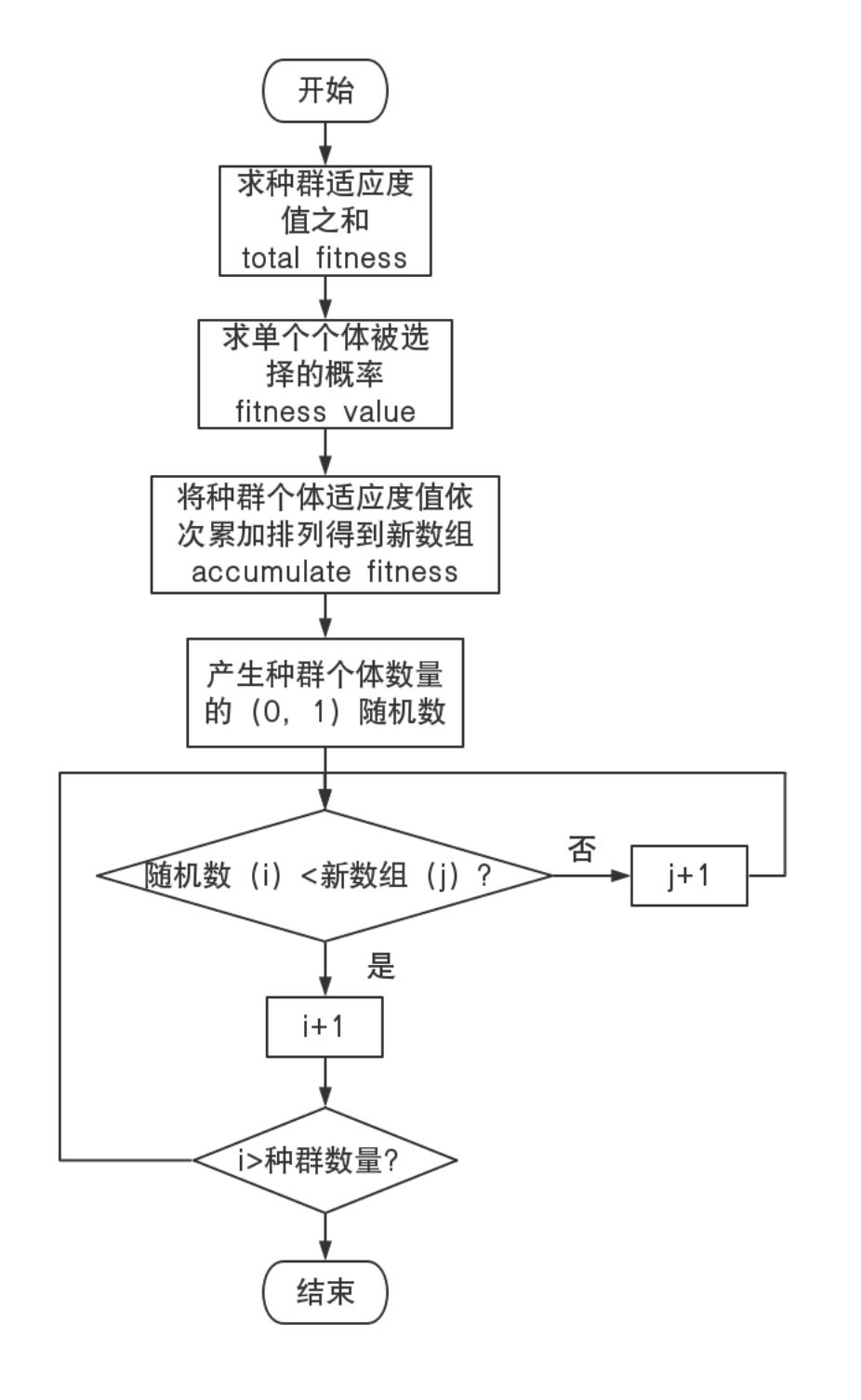
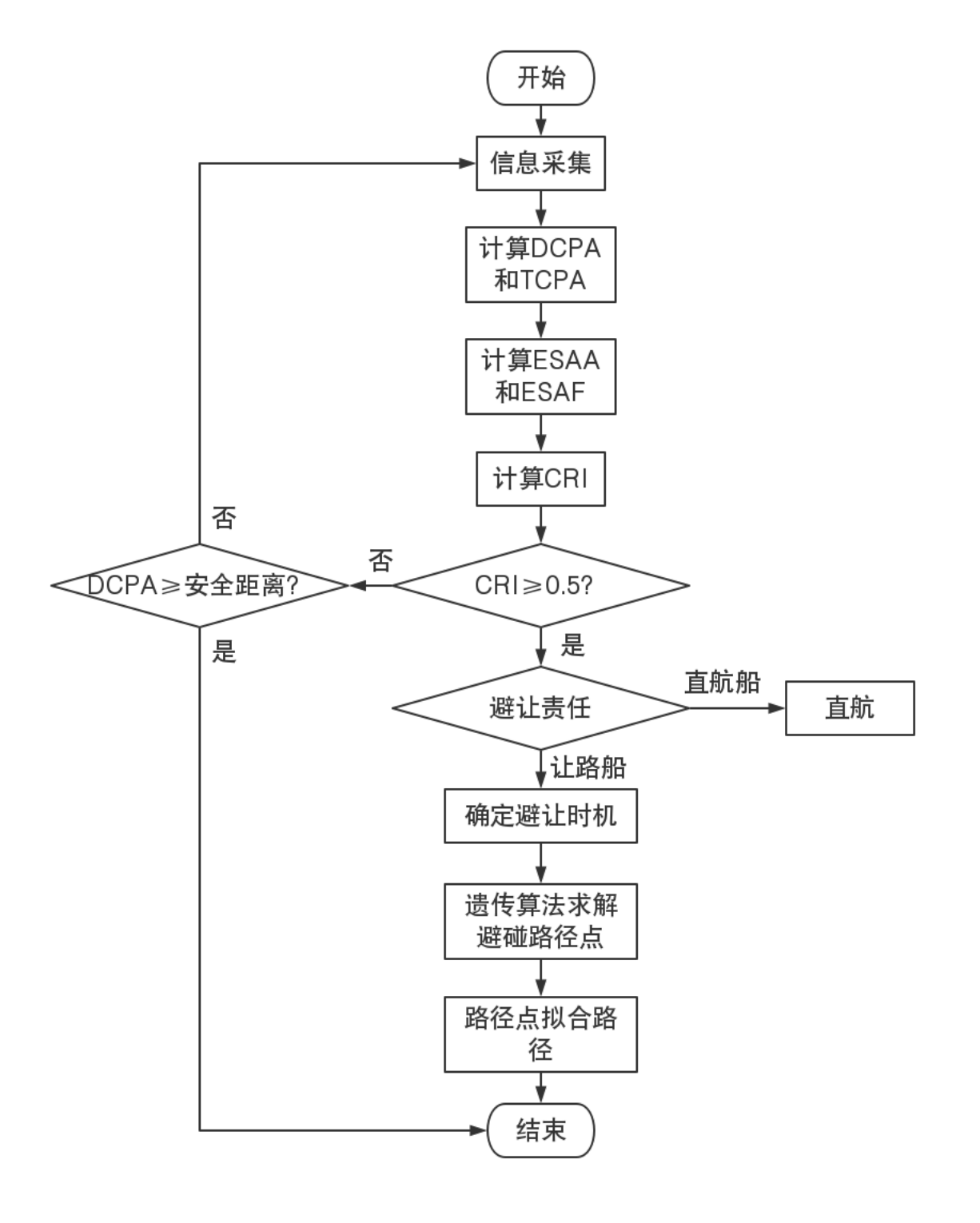
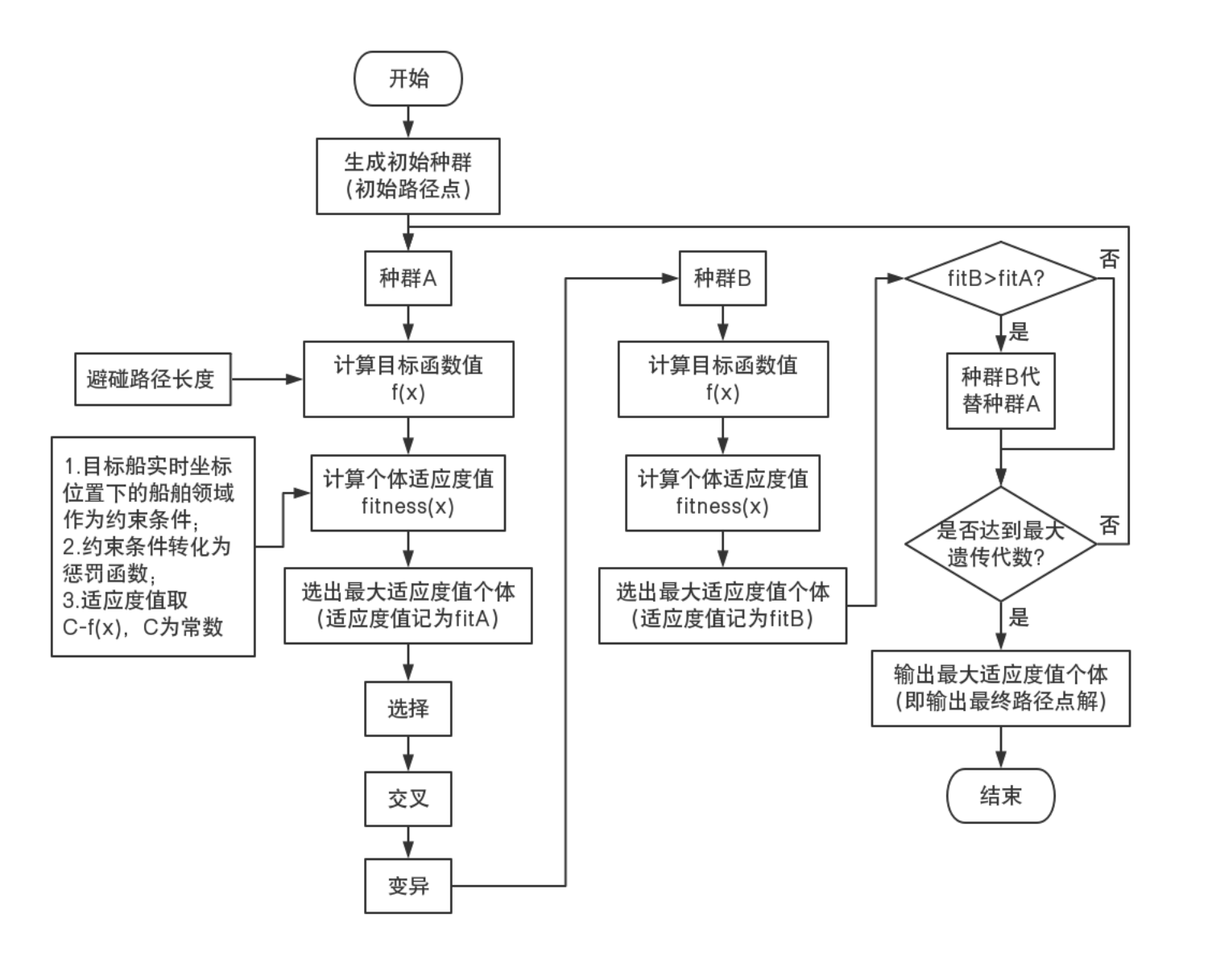
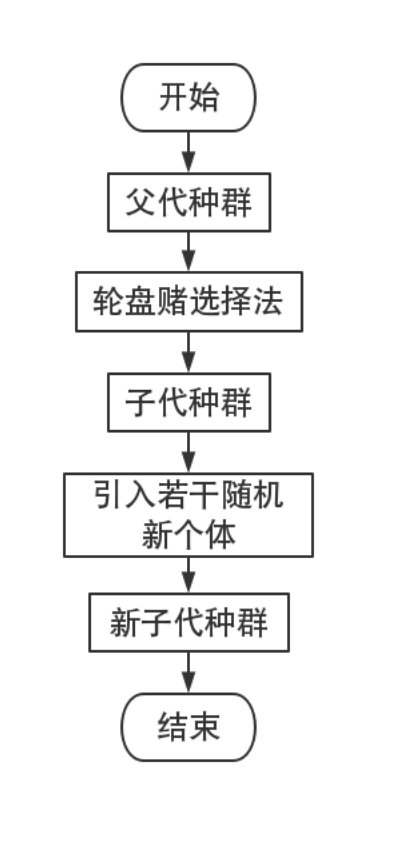
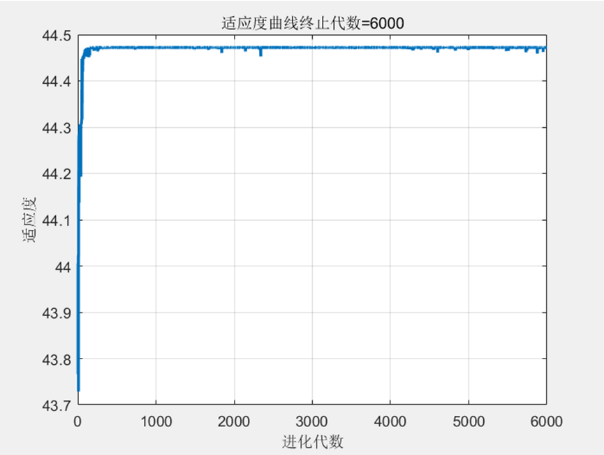
(2)针对智能船舶的避障与局部路径规划问题,设计了基本的避碰决策流程。利用遗传算法的思想设计了一种局部路径规划智能算法。完成了算法的基本流程和遗传算子的设置,并引入惩罚函数的思想,通过建立一个惩罚函数来解决算法中的不等式约束,将算法简化为不带约束的目标优化问题。针对遗传算法出现的早熟收敛情况,提出了一种改进选择策略,通过仿真实验验证了其有效性。
(3)利用所设计的局部路径规划智能算法,针对典型的对遇局面、追越局面和交叉相遇局面,分别设计了仿真实验,仿真结果均证明了算法的可行性与有效性。在三种会遇态势下,本船均能以较短的总路径长度以及较小的避让幅度完成整个避碰过程的路径规划,并最终回归到原始航线上。
关键词:智能船舶;局部路径规划;遗传算法;船舶领域;碰撞危险度
ABSTRACT
In computer, Internet, sensors, communications, data analysis, brain science, psychology and philosophy of new technology, new disciplines such as intersection, common development, the artificial intelligence technology arises at the historic moment. While the developed countries in the world have issued policies, deployed strategies and cultivated talents, China has fully realized the importance of artificial intelligence for future science and technology as well as economic development. In order to solve the problems of high operating cost, complex ship operation and the threat to crew's lives under extreme sea conditions, and to meet the needs of safety, environmental protection, economy and reliability, the ship industry and shipping industry have been increasing the technical investment in Intelligent Ship in recent years. In order to respond to the government's call for the research of intelligent ship technology, this paper studies the local path planning in the category of intelligent navigation research of intelligent ship. In this paper, a local path planning intelligent algorithm is designed and simulated by using the idea of genetic algorithm, combining the concepts of ship domain model and collision risk model, and solving the problems of nonlinear inequality constraint and premature convergence. Simulation results demonstrate the feasibility and effectiveness of the proposed algorithm.
(1) Based on the geometrical principles of collision avoidance, the formulas for calculating the minimum collision distance (DCPA) and the time to reach the minimum collision distance (TCPA), two important parameters in the process of collision, are proposed and derived. Based on the concepts of CheeKuang Tam and Richard Bucknall, a ship domain model for the position of the target ship is established. DCPA and TCPA weighted method were used to calculate the risk coefficient (CRI) of ship collision.
(2) For the obstacle avoidance and local path planning of intelligent ship, the basic decision process of collision avoidance is designed. An intelligent algorithm for local path planning is designed based on the idea of genetic algorithm. The basic flow of the algorithm and the setting of genetic operator are completed, and the idea of penalty function is introduced. By establishing a penalty function to solve the inequality constraints in the algorithm, the algorithm is simplified to the objective optimization problem without constraints. Aiming at the premature convergence of genetic algorithm, an improved selection strategy is proposed, and its effectiveness is verified by simulation experiment.
(3) Using the local path planning intelligent algorithm, designed in the light of typical encounter situation, overtaking situation and crossing situation, designed a simulation experiment respectively, the simulation result proves the feasibility and effectiveness of the proposed algorithm. Under the three collision situations, the ship can complete the path planning of the whole collision avoidance process with a shorter total path length and a smaller avoidance range, and finally return to the original route.
Keywords: Intelligent Ship; Local Path Planning; Genetic Algorithm; Ship Domain; Risk of Collision
目 录
第1章 绪论 1
1.1选题背景及意义 1
1.2智能船舶 2
1.2.1智能船舶定义 2
1.2.2发展历程 2
1.3路径规划国内外研究现状 3
1.4主要研究内容及章节安排 4
第2章 智能船舶避障分析与数学建模 5
2.1船舶避障 5
2.1.1船舶碰撞 5
2.1.2船舶会遇 5
2.1.3碰撞阶段与会遇局面 5
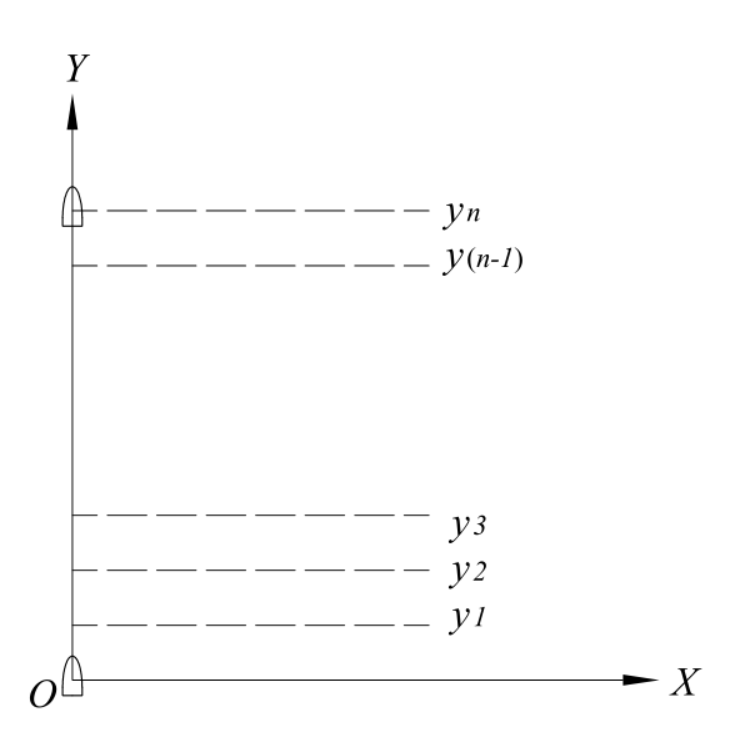
2.2平面运动坐标及参数 7
2.3船舶领域模型 9
2.4碰撞危险度模型 11
2.5本章小结 11
第3章 局部路径规划遗传算法优化设计 13
3.1遗传算法概述 13
3.1.1基本概念 13
3.1.2基本流程 14
3.2算法设计 15
3.2.1变量设置及编码 15
3.2.2目标函数和适应度函数 16
3.2.3约束条件 17
3.2.4惩罚函数 20
3.2.5遗传算子 20
3. 3本章小结 22
第4章 局部路径规划算法仿真验证 23
4.1编程平台简介 23
4.2模型假设与参数设定 23
4.2.1模型假设 23
4.2.2参数设定 23
4.3避碰决策及算法 25
4.3.1避碰决策流程 25
4.3.2局部路径规划算法流程 26
4.4早熟收敛优化 27
4.5仿真实验结果与评价 31
4.5.1对遇局面 31
4.5.2追越局面 34
4.5.3交叉相遇局面 38
4.6本章小结 41
第5章 总结与展望 42
5.1研究总结 42
5.2研究展望 42
参考文献 44
致谢 47
攻读学士学位期间发表的论文 49
第1章 绪论
1.1选题背景及意义
在计算机、互联网、传感器、通信、大数据分析、脑科学、心理学和哲学等新技术、新学科的交叉融合、共同发展下,人工智能技术应运而生。人工智能的研究使机器实现了视、听、触、感及思维的集成化,同时表现出智能搜索、学习、推理、感知、识别等能力。在这个经济与科技全球化的21世纪,人工智能已然成为了国际竞争的热点。在世界各个发达国家纷纷出台政策、部署战略、培养人才的同时,我国也已充分认识到了人工智能对未来科技以及经济发展的重要性。由国务院于2017年7月8日印发并实施的《新一代人工智能发展规划》中明确指出,我国要抢抓人工智能发展的重大战略机遇,构筑我国人工智能发展的先发优势,并且加快建设创新型国家和世界科技强国。
在人工智能快速发展的背景下,船舶与海洋工程学也逐步走向智能化发展的道路。为解决营运成本高昂、船舶操作复杂、极端海况下船员生命安全遭到威胁等问题,为满足安全、环保、经济和可靠等需求,近年来船舶工业与航运业界不断增加对智能船舶的技术投入。我国政府在《中国制造2025》中明确、重点指出,船舶业与航运业的智能化发展是其中之一的要务。工业和信息化部、交通运输部、国防科工局于2018年12月27日联合印发《智能船舶发展行动计划(2019-2021年)》。《行动计划》中明确提出,经过三年努力,形成我国智能船舶发展顶层规划,初步建立智能船舶规范标准体系,突破航行态势智能感知、自动靠离泊等核心技术,完成相关重点智能设备系统研制,实现远程遥控、自主航行等功能的典型场景试点示范,扩大典型智能船舶“一个平台 N个智能应用”的示范推广,初步形成智能船舶虚实结合、岸海一体的综合测试与验证能力,保持我国智能船舶发展与世界先进水平同步[1]。
在《智能船舶规范中》将智能船舶的功能分为了智能航行、智能船体、智能机舱、智能能效管理、智能货物管理和智能集成平台六个方面。智能船舶的路径规划研究,即是智能航行的重要研究内容。智能船舶具有高速度、高机动性、高工作精度、高工作危险度的特点[3]。所以,智能化的路径规划研究对其性能上的提升十分重要。
智能船舶的路径规划包括全局路径规划和局部路径规划。其中全局路径规划是基于电子海图扫描,航道环境与障碍已知情形下的最优路径决策。智能船舶需要对全局静态的障碍环境建立一条光滑的路径,旨在避开所有障碍物的前提下,从起点沿着规划的路径到达终点,期望达到最少的能耗、最短的时间和最短的行程。局部路径规划是通过雷达扫描或者摄像头或者其他传感器获取船体附近障碍物信息,并在局部范围内实现对探测到的静态、动态障碍物的避碰与路径规划。目的是为了帮助智能船舶在全局路径下的局部避碰与路径规划及优化调整。
船舶在航道或者海上航行时,会频繁遇到不可预知的障碍物,如海上漂浮物或是行驶中的船舶。智能船舶如何对局部探测到的动态障碍物,特别是行驶中的船舶采取及时、合适的避碰策略,并进行局部航行路径的调整,成为了路径规划研究中的重难点问题。在传统的避让决策中,通常是经验丰富的海员根据海上实际的会遇状态来判断碰撞危险程度,并根据《避碰规则》来决定避让的时机,并根据避让责任采取相应的避让行动。但由于观测误差以及海员自身心理素质的影响,并不总能达到预期的避让效果,甚至还会导致碰撞事故的发生。因此以计算机技术辅助,甚至代替人的观测、决策和执行过程,以达到更高的避碰精度和更小的碰撞事故发生概率,最终实现智能化的局部路径规划方法的研究显得尤为重要。本文主要针对智能船舶的局部路径规划展开研究。
1.2智能船舶
1.2.1智能船舶定义
智能船舶(I-Ship)系指利用传感器、通信、物联网、互联网等技术手段,自动感知和获得船舶自身、海洋环境、物流、港口等方面的信息和数据,并基于计算机技术、自动控制技术和大数据处理和分析技术,在船舶航行、管理、维护保养、货物运输等方面实现智能化运行的船舶,以使船舶更加安全、更加环保、更加经济和更加可靠[3]。
1.2.2发展历程
2006年,由国际海事组织(IMO)提出e-Navigation概念,即电子航海。其是通过电子信息技术,收集、整合并显示海事信息,实现船舶与岸上的信息交互,以达到增强船舶离港、航行和泊位的综合能力,提高海上的服务能力、安全保障能力,以及海洋环境保护能力。这可以算是智能船舶的最初概念。
2012年,由Fraunhofer CML公司、MARINTEK公司、Chalmers大学等8家研究机构共同合作的“MUNIN”项目首次以无人散货船为对象展开大型智能船舶的研究。
2015年9月,英国劳氏船级社、奎纳蒂克集团和南安普顿大学合作推出了《全球海洋技术趋势2030》。
2016年3月,由中国船级社(CCS)发布的“智能船舶规范”正式生效。
2017年12月,在上海成立了中国智能船舶创新联盟。
2017年12月,全球首艘通过英国劳氏船级社和中国船级社认证的智能船舶“大智号”散货船正式交付使用,主要用于中澳、东南亚航线的煤炭以及盐的运输。
2018年8月,挪威航运巨头威尔森集团(Wilhelmsen)和康士伯(Kongsberg)联手建立了全球首家智能船舶航运公司—“Massterly”,公司设在挪威吕萨克。
2018年11月,罗罗公司和芬兰国有渡轮运营商Finferries在芬兰图尔库市南部的群岛成功展示了世界上第一艘全自动渡船,在芬兰帕拉宁和诺沃之间实现了自动航行。
1.3路径规划国内外研究现状
船舶的自主避碰及路径规划研究,略早于智能船舶概念的提出。20世纪90年代,Iijima和Hagiwara采用宽度优先搜索方法设计了一套能够自主进行避碰决策和避碰控制的系统,利用该系统进行避碰路径的选择和规划的研究[8]。20世纪末,Churkin和Zhukov尝试采用连续和离散的研究方法建立避碰策略的数学模型[9]。连续的方法采用线性规划使船舶避让过程中的偏航变化率最小;离散的方法是使路径与顶点离散化并求解路径的最优,两种方法都未考虑环境的影响。21世纪初,Hwang等人运用模糊集合理论建立船舶碰撞危险度模型,并结合知识库系统来确定避碰策略[10]。随后Chang等人提出一种采用迷宫布线算法在栅格图上计算避碰路径的模型[11]。该模型将船舶领域以及障碍物空间用离散化的圆形来表示,航行的船舶不能侵入彼此的圆形区域,不足之处在于并未考虑海上避碰规则和实际环境影响。
由于人工智能的发展,传统的计算方法已不满足智能船舶对于自主避碰与路径规划的要求,国内外许多学者开始研究智能化的船舶路径规划研究,例如人工势场法、神经网络法、遗传算法、蚁群算法等都已逐渐应用到智能船舶的路径规划中来。段群杰、张铭钧等人采用能实现模糊控制规则的基于强化学习方法的自学习和自调整算法来实现水下机器人的局部路径规划[12]。Smierzchalski在船舶避碰路径规划中采用了进化算法,在航行路径的特定区段应用基因突变,使得船速的改变成为可能。陈华采用多目标遗传算法,对无人艇航行会遇时出现的静态障碍物和动态船舶的避障与路径规划,进行了初步研究[17]。王程博、张新宇等人建立了一种基于Q-Learning的无人驾驶船舶路径规划模型,应用基于马尔科夫过程的Q学习算法,分别就环境模型、动作空间、激励函数及动作选择策略4大要素建立模型、设计激励函数、规划最优策略,实现了未知环境中的船舶避碰和路径规划[21]。张强、陈兵奎等人对传统人工势场算法进行了改进,解决了原算法存在死锁及局部路径欠优等问题。同时又针对蚁群算法进行了改进,从而避免了算法早期由于盲目搜索而导致的路径交叉及收敛速度慢的问题。其以收敛次数构建负反馈通道,使全局信息素和局部信息素的更新速率跟随收敛次数的变化自适应调节,从而保证了算法全程中收敛速度与全局搜索能力的协调与统一,最终在移动机器人的路径规划上实现了较好的效果[22]。
1.4主要研究内容及章节安排
本论文主要是研究智能船舶的局部路径规划问题。通过查阅、分析大量国内外近年的文献,并对其进行归纳整理,形成本论文研究的主体思想。以一艘小型智能船舶为研究对象,假定其操纵性能可以实现在短距离,短时间内完成转首、回转、降速等操作,以达到对目标障碍物的避碰。再以《避碰规则》为指导,并且在不考虑风、浪、流的理想环境下,结合遗传算法设计一种局部路径规划算法,实现在未知海况下对局部范围内出现的静态或动态障碍物进行避碰决策。在两船会遇的情况下本船能根据不同的会遇态势判断避让责任,并采取及时的避碰决策,以最短的路径和最小的避让幅度完成避碰。
论文章节的主要内容有:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: