011自升式平台方案设计毕业论文
2020-04-03 11:53:19
摘 要
自升式钻井平台在海上的移动式平台中有着举足轻重的地位。因为有着定位性好、稳定性高以及建造成本低等特点,我国近海海域上工作的钻井平台大部分都是自升式钻井平台。本文在CCS的相关规范和各类参考书的指导下,对“011”自升式钻井平台进行了初步方案的设计和校核。
本篇文章主要分为初步的方案设计及性能计算。第一,根据任务书和规范相关的要求,查阅母型平台的资料,再优选母型平台,最后根据母型平台法确定设计平台的主尺度。第二,参照母型平台的布置,对设计平台进行总体布置,再对设计平台进行重量和重心位置的估算,最后用AutoCAD和Excel相互合作进行静水力计算。第三,在平台性能计算与校核中,首先由《1966年国际船舶载重线公约》中的相关内容对平台干舷进行校核,再根据规范对平台的稳性进行校核,最后校核的结果均满足规范的要求。
关键词:自升式平台;方案设计;载荷计算;稳性校核
Abstract
Jack-up drilling platforms play an important role in mobile offshore drilling units. It has the advantages of strong positioning capability, good operation stability and low construction cost, so that jack-up drilling platforms are widely used for offshore operations. In this paper, the preliminary design of “011” jack-up drilling platform is with the guidance of CCS Rules and regulations, as well as other references.
This paper is mainly divided into two parts: preliminary design and performance calculation. Firstly, according to the requirements of both the assignment book and the rules, consult the data of different the parent platforms, and select one as a reasoning parent platform. Then the principal dimension of the platform in design is determined by the parent platform method. Secondly, according to the layout of the parent platform, the overall layout of the platform in design is completed, the weight and the center of gravity of the platform are estimated, then the static hydraulic calculation is carried out by applying AutoCAD and Excel. Thirdly, during the calculation and check of the performance of the platform, the platform freeboard is checked by the relevant contents of the “1966 international ship load line convention”, and then the stability of the platform is checked according to CCS Rules. The results of the final verification meet the requirements of the standards.
Key words : jack-up platform; program design; load calculation; stability check
目录
第一章 绪论 1
1.1研究背景 1
1.2国内外的研究现状 1
1.2.1自升式钻井平台的发展历史 1
1.2.2国外自升式钻井平台发展现状 2
1.2.3国内自升式钻井平台发展现状 3
1.3钻井平台的发展趋势 4
1.3.1朝着多功能发展 4
1.3.2朝着机械化、智能化发展 4
第二章 “011”自升式平台初步方案设计 5
2.1平台的形式 5
2.2主尺度的确定 5
2.2.1主尺度的定义 5
2.2.2主尺度的确定 6
2.3平台的总体布置 10
2.4重量和重心位置计算 11
2.4.1空平台重量的计算 11
2.4.2可变载荷计算 14
2.4.3重心位置的计算 15
2.5静水力要素 16
2.5.1建立坐标系 16
2.5.2 计算静水力的方法 17
2.5.3静水力的计算结果 18
第三章 海洋环境载荷计算 21
3.1环境载荷参数 21
3.2风载荷 22
3.2.1计算的方法 22
3.2.2风载荷的计算结果 24
3.3波浪载荷 29
3.3.1计算的方法 30
3.3.2波浪载荷的计算结果 32
3.4海流载荷 33
3.4.1计算的方法 34
3.4.2海流载荷的计算结果 35
第四章 平台的性能计算与校核 36
4.1平台最小干舷的校核 36
4.1.1基本干舷值 36
36
4.1.2长度修正值 36
36
4.1.3方形系数修正值 37
37
4.1.4型深修正值 37
37
4.1.5上层建筑的修正值 38
38
4.1.6舷弧修正值 38
38
4.2完整稳性的校核 40
4.2.1坐标系 40
4.2.2一般完整稳性准则 40
4.2.3初稳性 41
4.2.4动稳性 41
4.3站立稳性的校核 44
4.3.1一般站立稳性准则 44
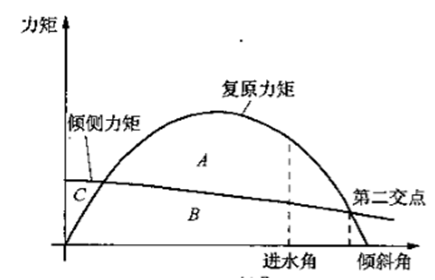
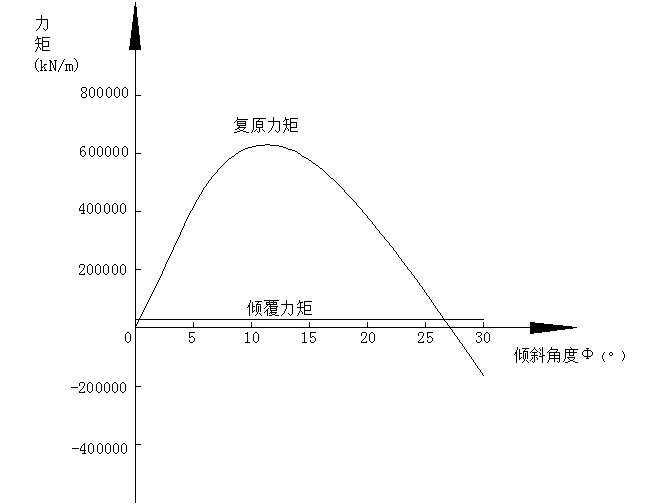
4.3.2抗倾稳性 45
4.3.3抗滑稳性 48
第五章 总结 50
参考文献 51
致谢 53
第一章 绪论
1.1研究背景
全球的经济以势不可挡的速度发展着,导致全球对能源的需求量大幅度的增加,石油和天然气作为能源中的重要组成部分,在世界能源中有着独一无二的作用。现在我国的陆地石油与天然气的开采强度达到了很高的地步,陆地上的油气资源正在以我们大家都能感受到速度的减少,发掘新的资源已经成为一种必然的趋势。我们大家都知道海洋中有着大量的化学元素、丰富多彩的水产品和各种各样的藻类以及像波浪能和潮汐能等海洋动力资源,还有着海上油气、可燃冰等我们所需要的油气资源,所以占据全球资源总量的34%的海洋资源现在已经成为人们空前关注的热点和勘探开发的焦点。我国的海岸线漫长,再加上有着广袤的海洋环境,其中有着各式各样的海洋油气资源,因此我国朝着海洋发展能够缓解当前的能源危机问题[1]。
1950年后,自升式平台作为一个新兴的平台类型加入到了全球的海洋石油资源开采中,到现在自升式钻井平台已经成功的应用在了开采海洋石油的各个方面。自升式钻井平台具有定位性能好和作业时候的稳定性高等特点,在移动式平台中有着非常重要的作用[1]。自升式钻井平台由上部的主体和各种机械设备以及带有桩靴的桩腿结构三部分组成,为了避免平台受到海浪的作用,当平台在工作时先利用升降系统将主体部分托举到离水平面有一定距离的地方,然后依靠桩腿支撑着整个主体,再按流程逐步完成作业。当平台结束作业后,利用升降机构将平台的主体降到离水面非常接近的位置,然后将桩腿从海底拔起,再将桩腿升到适合拖航的位置,最后利用其他交通工具将平台拖到新的作业点进行新的钻井工作[2]。自升式平台的不同点在于设计的理念和具体的操作,以至于在大量的通用结构上存在着细微的差别 [3]。自升式钻井平台没有自航的能力,但是由于建造成本低,移动性能好,并且对海底各种地形的适应能力强,因此在我国近海海域工作的钻井平台形式多为自升式[4]。
1.2国内外的研究现状
1.2.1自升式钻井平台的发展历史
自升式钻井平台专利在1869年最先由美国人申请。1954年,“德隆1号”(DeLong No.1)作为世界上的第一座自升式平台成功建造。它拥有着10条桩腿,每条桩腿的直径均为1.8m(6ft),每根桩腿长48.8m(160ft),该平台采用了L.B.德隆设计的升降系统[5]。从1956年后的50多年里,自升式钻井平台已经成为了海上的可移动式钻井平台的首选类型,占据了全球的钻井平台市场的一半以上。在1973后,全球的自升式钻井平台的数量越来越多,仅在1973年到1983年的十年间就建造了300多座。在之后的20年间,近海油气的勘探开发达到了低谷,导致众多的平台被废弃。从2004年起,世界经济的恢复与各地新兴市场的需要等因素使油价上涨,近海油气的勘探开发又开始了新一轮的高潮。2004-2008年底,全球的深水自升式平台已有117座。但是从2008年底开始,遭遇全球经济危机,导致能源的需求量下降,油气价格停滞不前,从而自升式钻井平台的需求量大幅度下降。到2014年,据RIGZONE统计,全球一共有1102座钻井平台,其中自升式平台就有637座,占海上钻井平台的半壁江山[6]。
1.2.2国外自升式钻井平台发展现状
欧美国家进行海洋油气资源的勘探开发已经有100多年历史,在最重要的技术与主要装备上久居垄断的地位。新加坡的船厂KepplFels和BMC通过同欧美的设计公司进行合作,然后引进欧美关于自升式钻井平台的先进技术,在先进技术的基础上由工作人员进行自主的研发,形成了关于自升式平台的自主设计和专利,但是总体上相对欧美的设计公司来说在技术上还有较大的差距[7]。
在钻井平台的设计方面,国外的自升式钻井平台的设计公司主要有美国的LeTourneau公司[8]、Baker Marine 公司 ( 现被 PPL 收购) 、Friede& Goldman 公司[9]、BASS[10] 与 BMC 公司[11],荷兰的 MSC 公司[12],法国的 NOV-BLM 公司、CFEM公司、KepplFels公司以及日本的三井海洋开发[13]与HitachiZosen公司等。当前处于领先地位的是LeTourneau 、GustoMSC 、Famp;G 、Baker Marine和KeppelFels。
美国的LeTourneau公司是世界上自升式钻井平台设计的奠基人,在1955年设计建造了世界上第一座自升式钻井平台“The Scorpion”号,全球有一半以上的自升式平台是LeTourneau型号。该公司建造的平台主要有NESCO81、NESCO85和NESCO92等等。
荷兰的MSC公司在1977年开发设计了CJ系列的自升式钻井平台,CJ系列的平台能在超恶劣环境的海域工作。采用MSC公司“CJ 70-150MC”型设计的“Maersk Lnnovator”号和“Maersk Lnspirer”号平台是世界上现有的最大型号的自升式钻井平台。
美国的Famp;G公司在1997年因为资金问题将LB780 Mod V和Mod VI的设计同图纸一起卖给了新加坡的公司[14]。在1980年左右申请了关于齿条锁定系统的专利,齿条锁定系统的出现让自升式钻井平台能够在海况更加恶劣的海域中工作。同时期还设计开发出了L-780型自升式钻井平台,并取得了较好的效果。
1.2.3国内自升式钻井平台发展现状
我国在海洋油气装备上的起步相对于其他国家来说比较晚,因此我们的技术基础比较薄弱。我国自升式钻井平台的核心设备和主要技术主要依靠引进其他国家的先进技术,在我国国内只有极少数的厂商在核心设备和关键的技术方面取得一定的成就。我国国内目前由我们全体工作人员自主研发设计的钻井平台有圆柱腿式平台和深水衔架式平台。“海洋石油941”和“海洋石油942”是国内目前现有的钻井平台中作业的水深是最深的,也是所有平台中自动化程度最高的,最能代表国际先进水平的钻井平台[15]。
我国的首座自升式钻井平台“渤海1号”在所有人的热切关注下由708所在1967年完成设计,在完成设计后的第三年交给大连船厂开始建造。“渤海1号”的建造成功,填补了我国在自升式钻井平台的空白[16]。在所有设计人员和船厂的努力下,1978年我国国内的首艘浅海座底式的钻井船“胜利一号”顺利问世,在使用期间取得较好的效果。在后来的时间里直到国内首座半潜式的钻井平台“勘探三号”建造结束后,我国在海洋平台的建造方面才有了长远的发展。我国通过引进其他国家先进的技术,并在他们技术的基础上进行自主研发设计,我国的自升式钻井平台的技术逐步取得了优异的成绩。随着油价的上涨和我国在海洋平台设计建造方面的技术越来越好,从2006年后开始,我国国内承建的海洋平台的数量逐渐增加。我国除了建造各类的海洋平台外,还承担了国内外的多座具有较高水平的钻井平台与勘探船项目,如坐底式钻井平台中海油3号、半潜式钻井平台海洋石油981、3000m水深的海洋勘探船等[17]。
我国现有的船舶公司大部分以建造船舶为主,其中的一些公司也接过部分海洋钻采平台的建造任务,但是我国还没有专业的建造海洋平台的企业。虽然我国国内有较多的企业能生产陆上石油钻采装备,但是其中只有一部分的公司具有大规模制造能力。总的来说,在海洋石油的开发和相关的技术研究方面,我国同发达国家相比还有较大的差距[18],但是我们也取得了一定的成绩。例如,HuiXiaZhang[19]等人在2014年做了以波浪数值模拟为基础的平台振动特性研究,ZiliWang[20]等人于2016年对自升式钻井平台的横向穿孔的T型接口进行了试验和数值模拟。
1.3钻井平台的发展趋势
1.3.1朝着多功能发展
新建造的海洋平台具有各式各样的功能,如采油、修井。FPSO不仅有定位系统,具备海洋平台的各种功能,还可以作为穿梭油轮。多功能半潜式钻井平台的适用范围也越来越广,根据使用的需要可以将其用作钻井平台、起重平台和生活平台以及海上科研基地等[16]。
1.3.2朝着机械化、智能化发展
海洋工程装备由于特殊的工作环境,技术应该向着更有利于石油的钻采和人们能更加高效安全的工作方面出发,开发出自动化程度更高、更加智能的设备。随着新技术的不断涌现,未来的大型海上油气田可以用远程自动控制和系统智能监测成为人们追求的目标[21]。
第二章 “011”自升式平台初步方案设计
2.1平台的形式
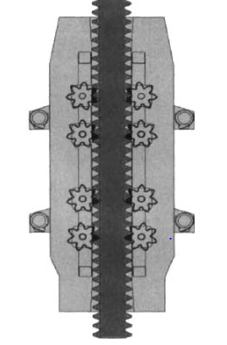
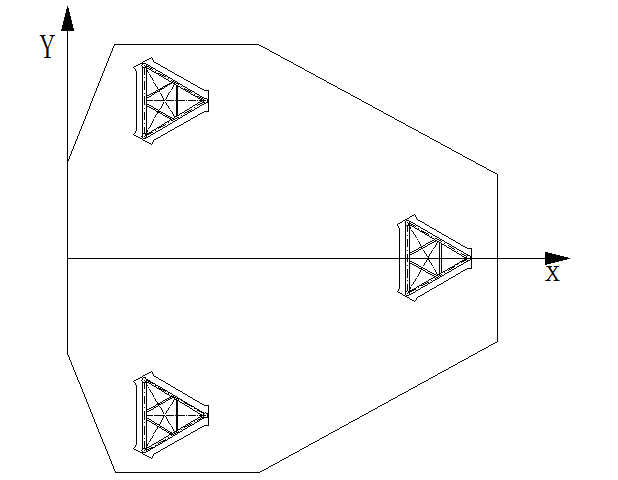
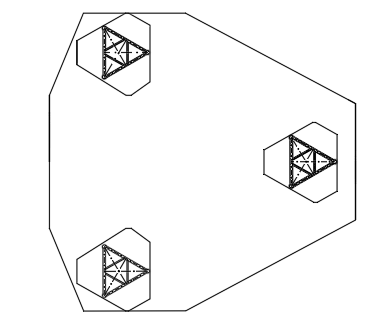
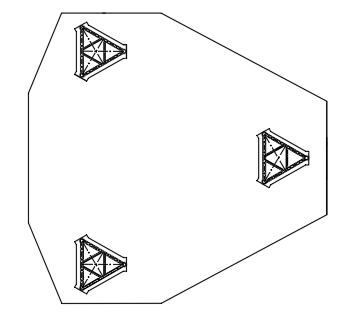
设计的平台形式为自升式钻井平台,没有自航的能力,在平台的不同方向上设有三条桩腿。该平台是用来进行海洋石油的开采,工作的海域在我国南端的南海,工作的水深为90m。
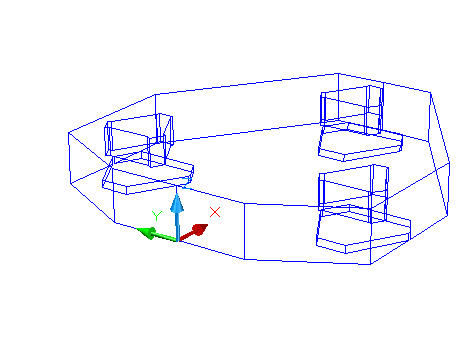
设计平台由上部的平台主体、底部带有桩靴的桩腿和升降系统组成。平台主体是箱形结构,并且箱形结构是双层底和单甲板的,平台主体的平面为三角形形状。桩腿的形式为桁架式,在每根桩腿的最底部设有桩靴,每根桩腿上都安装了电动的升降系统。
上部的平台主体沿平台长度分为左右两个部分,即左边的生活区域和右边的工作区域。
2.2主尺度的确定
2.2.1主尺度的定义
1.平台长度L
L是在平台的0.85D处,沿着平台上的中纵剖面,从平台的首壳板到尾壳板内缘之间的水平距离,并且不考虑井口槽对其的影响[22]。
2.平台宽度B
B是从垂直于平台的纵剖面处量得的平台两侧的舷壳板内侧之间的最大水平距离[22]。
3.型深D
D是在平台长度的中点处沿着舷侧从基线开始到干舷甲板的下缘之间的垂直距离[22]。
4.吃水d
D是从平台的基线到勘划的载重线之间的垂直高度。平台的结构和机械设备上的某些构件或者部件可以沿伸到基线以下的位置[22]。
5.水深H
H是从海底面到平均低水位的海平面间的垂直距离再加上天文潮的潮高和风暴潮的潮高[22]。
2.2.2主尺度的确定
平台的主尺度是按照“母型设计法”进行一定的计算而得到。母型设计法,即根据母型平台的布置来进行新平台的初步设计。母型平台的主尺度详情如表2.1所示。
表2.1母型平台的主尺度
部位 | 项目 | 单位 | |
主体 | 型式 | 井口槽式,三角形 | |
主体长L | m | 70 | |
主体宽B | m | 68 | |
型深D | m | 9 | |
设计吃水d | m | 7 | |
空船重量 | t | 12035 | |
井口槽尺寸 | m× m | 10.79×12.52 | |
方向系数 | 0.73 | ||
桩腿 | 型式 | 三角形桁架式 | |
数目 | 3 | ||
总长 | m | 165.14 | |
边长 | m | 12 | |
桩腿中心距(纵) | m | 39.70 | |
桩腿中心距(横) | m | 45.65 | |
作业水深 | m | 106 |
设计平台相关主尺度的确定方法如下:
1. 该设计平台的主体长度L和作业水深H是任务书已经确定了。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: