基于模糊逻辑的船桥碰撞预警系统方法外文翻译资料
2022-08-01 22:00:45

英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
基于模糊逻辑的船桥碰撞预警系统方法
摘要:本文提出了一种基于模糊逻辑的船桥碰撞预警方法,该方法考虑了船舶参数、桥梁参数和自然环境。它可以在决策支持系统中实现安全导航,也可以包含在自主导航过程中。通过考虑船舶位置,船舶轨迹方向,船舶到桥梁的距离和船舶速度来分析船桥碰撞条件。这些因素与自然环境一起被视为输入变量。然后,在对输入变量进行模糊化之后建立IF-THEN规则,并将其用于模糊推理,以得出船桥碰撞风险。从结果分析来看,所提出的方法可用于改善桥梁水道区域的船舶操纵。
关键字:海上安全;模糊逻辑;船桥碰撞;碰撞风险
1.背景
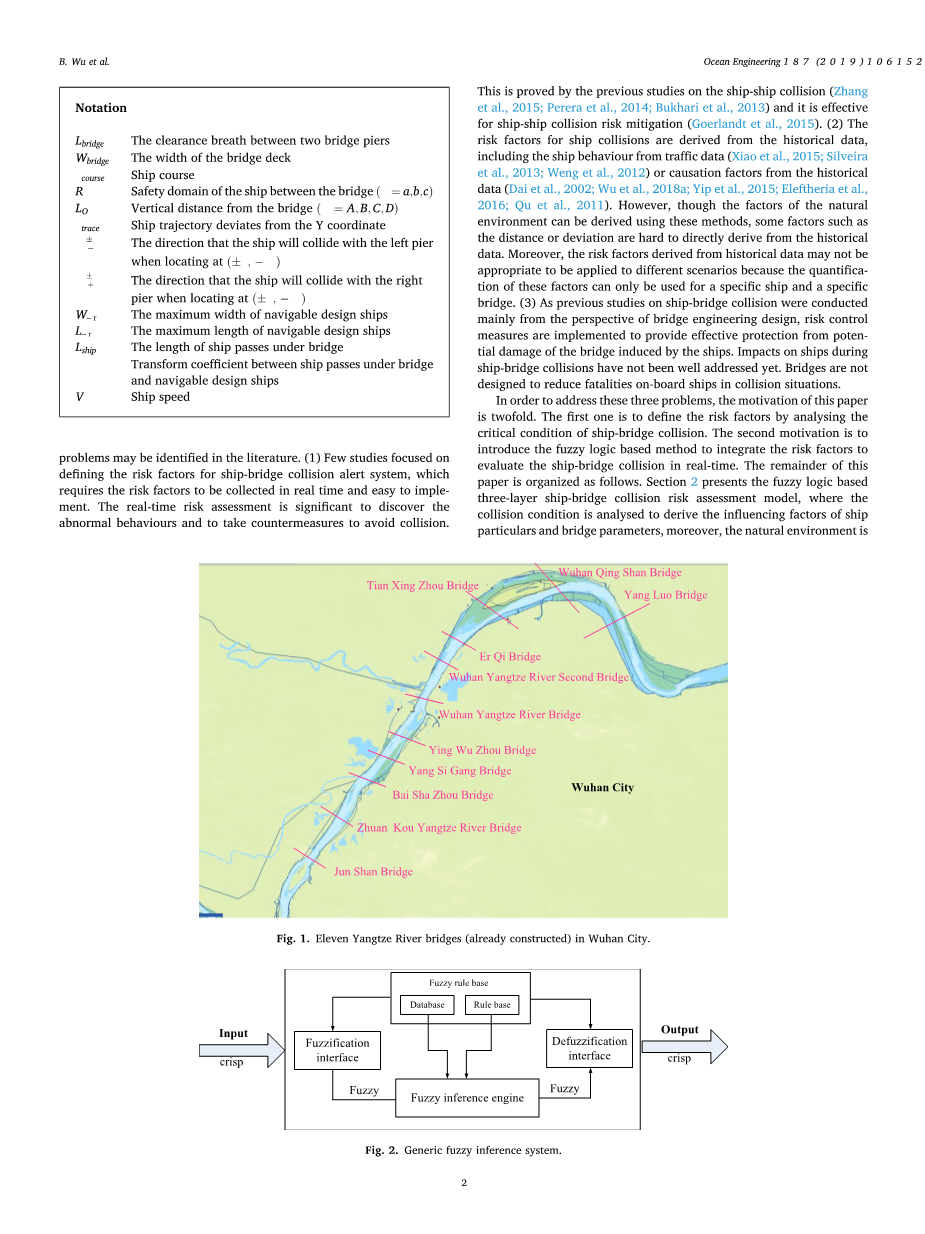
横跨水路(例如河道)的桥梁为从一岸到另一岸的运输提供了便利的方式。因此,沿内陆交通水道修建了许多桥梁。港珠澳大桥是由三座斜拉桥和一条海底隧道组成的桥隧系统,已于2017年11月14日竣工。在长江中,至2014年,从上海到宜宾的桥梁已有85余座,而且近年来这一数字还在快速增长。此外,在武汉、南京和重庆的航道中,桥梁的建造密度逐渐增大。具体而言,武汉在50公里范围内有13座桥梁(包括2座正在建造中)(如图1所示),南京35公里范围内有6座桥梁,重庆市区有11座桥梁。
图1.武汉市的十一座长江大桥(已建成)。
尽管桥梁是为运输提供了便利,但跨水路的桥却减小了船舶的通航宽度。桥墩是船舶航行的障碍,并且存在船桥碰撞的风险。1980年,一高架桥被一艘船撞上,事故造成35人死亡。2007年,与广东九江大桥的撞船事故已造成8人死亡。此外,发生了许多类似的致命事故。PIANC(常设国际航海大会)第19工作组开发了一个数据库,该数据库中记录了151起碰撞事故。在中国戴2002年收集了1959年至2002年6月的213次船舶与桥梁碰撞事故数据。实际上,船舶与桥梁碰撞事故是经常发生的事故,以武汉长江大桥为例,已收集了约100起碰撞事故。从1959年到2008年。此外,尽管并非所有事故都因其较小的后果而被记录下来,但还是发生了许多此类事故。
为了减小船桥碰撞的危险,文献中进行了几项研究。一些研究使用自动识别系统(AIS)的数据来发现异常行为。2015年肖作者使用AIS数据分析了长江下游苏通大桥水道区域的空间、速度和航向分布。Pedersen 2002年提出了固定海上结构的碰撞风险,以在设计阶段增强安全结构,交通流效率也是桥梁设计过程中的重要决策参数。张2014年分析了船桥碰撞过程,并使用有限元分析来分析对移动轻轨列车运行安全的影响。
可以总结出,以前的研究集中于使用历史数据进行风险分析或通过改善桥梁结构来减轻风险。但是,在文献中发现三个问题。(1)很少有研究专注于定义船桥碰撞预警系统的风险因素,这要求实时收集风险因素并易于实施。实时风险评估对于发现异常行为并采取对策以避免冲突具有重要意义。先前关于船舶碰撞的研究证明了这一点,它对于减轻船舶碰撞的风险有效。(2)船舶碰撞的危险因素是从历史数据中得出的,包括交通数据中的船舶行为。尽管可以使用这些方法来推导自然环境的因素,但是难以从历史数据中直接推导诸如距离或偏差之类的一些因素。此外,从历史数据中得出的风险因素可能不适用于不同的情况,因为这些因素的量化只能用于特定的船舶和特定的桥梁。(3)由于以前的船桥碰撞研究主要是从桥梁工程设计的角度进行的,因此采取了风险控制措施,以有效地防止船舶对桥梁的潜在损害。船桥碰撞中对船舶的影响尚未得到很好的解决。桥梁的设计不能减少碰撞情况下船上的人员死亡。
|
|
两个桥墩之间的呼吸间隙 |
|
|
桥面甲板的宽度 |
|
|
船舶航向 |
|
|
桥梁之间船舶的安全范围() |
|
|
距桥梁的垂直距离() |
|
|
船舶轨迹偏离Y坐标 |
|
|
当位于eth;时,船舶与左码头相撞的方向() |
|
|
当位于eth;时,船舶与右码头的碰撞方向() |
|
|
适航设计船的最大宽度 |
|
|
适航设计船的最大长度 |
|
|
船长通过桥下 |
|
|
桥下通航和设计航行船之间的变换系数 |
|
|
船速 |
为了解决这三个问题,通过以下两个方案去解决。第一个是通过分析船桥碰撞的临界条件来定义风险因素。第二个是引入基于模糊逻辑的方法来集成风险因素,以实时评估船桥碰撞。本文的其余部分安排如下。第2节提出了基于模糊逻辑的三层船桥碰撞风险评估模型,分析了碰撞条件,得出了影响船舶特性和桥梁参数的因素,并考虑了自然环境。第3节给出了通过桥下船舶的案例研究,并提出通过桥下船舶的改进轨迹。在第4节中进行讨论,在第5节中得出结论。
2.开发实时的船桥碰撞方法
2.1.建立基于模糊逻辑的船桥碰撞风险模型
模糊逻辑广泛用于风险分析和决策。该方法利用真实度作为模糊性的数学模型,并使用语言变量来表达输入因子,这对于船桥碰撞风险评估尤其重要,因为该风险受多种因素影响,并且对一个因素的评估通常不确定,不精确或含糊不清。而且,从语言变量去模糊的结果用清晰的值描述。这对于决策者采取对策以减轻船桥碰撞风险是很直观的。
如图2所示,模糊推理系统(FIS)由模糊化界面、模糊规则库、模糊推理引擎以及最后的模糊化界面组成。模糊推理系统的过程如下:1)使用模糊化方法将清晰的输入转换为模糊。2)通过使用许多模糊的IF–THEN规则来构建模糊规则库。3)模糊推理引擎根据IF-THEN规则执行推理操作。4)去模糊化界面将推理的模糊结果转换为清晰的输出。
图2.通用模糊推理系统。
通过引入模糊推理系统,建立了包括输入层、模糊推理层和输出层的三层框架,以评估船舶与桥梁之间的碰撞风险。所开发的框架如图3所示,对三层的详细描述如下。请注意,在开发用于碰撞风险评估的模糊推理系统时,有多个模糊推理系统模块,它们将在2.4小节中详细介绍。
图3.基于模糊逻辑的船桥碰撞风险模型。
第一层是清晰的输入层。由于本文主要针对船桥碰撞预警,因此应实时收集输入数据。本文使用两种类型的输入数据,即临界条件和自然环境。具体而言,前一种类型包括距桥梁的水平距离和垂直距离、航向和船速。后一种类型包括风速、海况、能见度和白天/晚上。选择这些因素的原因将在2.2和2.3小节中给出。
第二层是模糊推理层。在这一层中,通过使用语言变量对输入因素进行模糊处理,然后使用IF-THEN方案建立模糊规则库,最后,开发出用于船桥碰撞风险评估的不同模糊逻辑盒,并得出结果语言值所描述的内容可以导出。请注意,在建立IF-THEN规则时,会介绍使用AIS和领域知识的船舶行为。
第三层是输出层。可以通过重心法对模糊化后的船舶桥梁进行碰撞风险评估,决策者可以利用该结果(即清晰值)采取有效措施避免船舶与桥梁之间的碰撞。
2.2.通过分析碰撞条件来识别影响因素
为了获得影响船桥碰撞的因素,应首先分析船桥碰撞的临界条件。尽管可以从AIS的历史数据中得出速度分布、航向分布和距离,但如果将它们视为影响因素,则无法考虑船的特性和桥梁参数。因此,类似于船舶碰撞情况,应该对碰撞条件进行处理,以实现全面,实时且易于补充的方法。
假设有两个桥墩,它们之间的通航孔定义为,而桥面的宽度定义为。将通航孔的中点定义为坐标的原点,其中X坐标沿桥方向延伸,Y坐标船舶航行方向延伸。该船通过的桥梁位于的速度为V,航向为。
与用于船舶碰撞的船域相似,桥梁之间船的安全域被引入并划分为三个半径为的圆形截面。此外,距桥梁的垂直距离定义为:。定义船舶航向()为船舶轨迹偏离Y坐标,以促进模糊建模过程,其中顺时针定义为“ ”,逆时针定义为“-”,因此,theta;trace应满足方程。请注意,与不同。是考虑风和水流影响的,如果可以获取风和流,可以使用Zhang的详细关系推论得出。可以看出,如果偏离Y轴很多,则船将有很大的可能性撞向桥梁。假设船位于,如果沿当前方向保持不变,则将船与左码头碰撞的方向定义为,将船与右码头碰撞的方向定义为。请注意,本文将船简化为点。这是因为本文旨在从离桥梁较远的距离评估碰撞风险。否则,将没有足够的时间由船舶本身和海事当局采取相应行动。所有这些定义如图4所示。
图4.船桥碰撞情况。
通过分析碰撞条件,将船舶航向、垂直距离和水平距离定义为影响因素。与使用由船舶行为定义的风险因素相比,通过分析碰撞条件可以发现两种方法。首先,在使用历史数据定义风险因素时,很难考虑船舶特征和桥梁参数,而通过引入此方法,可以同时考虑船舶特征和桥梁参数。其次,本文定义的影响因素是通用的,可以在不同的场景中引入,而由船舶行为定义的影响因素是特定桥梁所特有的,因此很难将其引入其他场景中(例如,不同的桥梁)。
2.3.模糊化风险因素和风险指数
由于本文着重于船桥碰撞的实时风险评估,因此应该选取船舶本身或海事当局容易获取的输入因子。根据以上分析,可以将其分为临界条件和自然环境两种类型。前一种类型包括到桥梁的地平线、垂直距离、航向以及航速。后一种类型包括海况、风速、能见度和白天/晚上,与船舶碰撞风险分析相似。
当使用FIS时,第一步是为碰撞风险定义模糊集。定义表示通常由x表示的对象的集合。那么X中的模糊集A是一组有序对,其中被称为x在A中的隶属度,:X→M是从X到空间M的函数。因此,模糊集A可以通过使用0到1之间的数字与每个对象x关联来精确定义,该数字表示其在A中的隶属度。
与先前的研究类似,对M引入了评估间隔lt;0,1gt;,0值表示船桥碰撞风险较低,而1表示船舶与桥梁相撞,高于0.6被定义为不可接受的碰撞概率。模糊推理使用低、中、高、非常高的四个语言值。它们的定义为:低=(0,0,0.25)中=(0,0.25,0.50)高=(0.25,0.50,0.75)非常高=(0.50,0.75,1.00)。此外,如果去模糊化后的碰撞风险较低为0.4、中为0.6,则可以用B描述碰撞风险的模糊集(定义为B);类似地,可以以这种方式定义所有语言变量的模糊子集(即影响因素),然后可以通过基于模糊逻辑的方法来推断这些模糊集。
下一步是使用语言值模糊影响因素(即语言变量)。通常在模糊影响因素时,会使用两个以上且少于七个的语言值。这是因为如果使用了七个以上的语言值,则需要建立太多的模糊推理规则。但是,如果只有很少的语言价值,其结果可能无法令人信服,因为很难区分。此外,本文介绍了在实践中广泛使用的三角隶属函数,以描述语言值,注意梯形隶属度函数也被用来描述终端语言值。具体来说,以语言变量“可见性”的语言值为例(即非常好,好,低和差),如果认为大于6nm非常好,则使用梯形隶属函数来确保概率是一个。类似地,梯形隶属度函数还描述了另一种终端语言值较差,以确保低于0的可见度完全较差。其他值(即好,低)由三角隶属度函数描述,以确保如果语言变量“可见性”发生变化,则概率将发生变化。
2.3.1模糊化临界条件
(1)船与桥梁在X方向上的距离(水平距离,)。如图4所示,可以容易地推论出,当水平距离增加时,船将有较大的可能性引起与桥梁碰撞。这与用于船舰碰撞的船域相似,当船舶安全域增加时,近距离通行将被归类为碰撞的可能性较大,语言值如表1所示。请注意,距离从左起定义为“ ”。
表格1模糊化关键条件的语言变量。
|
临界条件 |
低 |
中 |
高 |
很高 |
|
|
|
|
|
—— |
|
|
|
|
|
|
|
|
|
|
|
—— |
此外,这些半径的值由最大可航行设计船的宽度()确定。对于船舶航行的单向流量,它们被定义为,,R。的1.5倍被定义为中等风险,因为与中国桥梁设计的最大通行设计船相同,桥墩之间的净空呼吸被定义为通航通道宽度的1.5倍。低风险和高风险的定义少于中度。具体而言,将低风险定义为1.1倍,将高风险定义为1.8倍。类似地,对于船舶航行的双向通量,它们被定义为,,。
实际上,通过桥下的船的宽度不会等于,通常小于或等于。将船宽定义为,可以使用系数()转换该特定船的半径,该系数定义为,其中和是可航行设计船的最大长度和船通过桥的长度。通过引入该系数,半径定义为,和。
(2)
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[241381],资料为PDF文档或Word文档,PDF文档可免费转换为Word



