基于肌电反馈的康复机器人控制研究毕业论文
2020-04-11 17:51:35
摘 要
通过移植原来工业机器人的控制方法,传统的康复机器人的控制策略得以实现,都具有较高的响应速度及控制精度,但是系统的柔顺性以及患者的自主参与度,才是体现康复机器人的性能的重要指标。因为患者不具备完整的关节活动能力并且很容易产生疲劳感,如果进行高速度、大角度、长时间的训练,患者很容易发生肌肉拉伤和痉挛等严重的事故。只是通过位置传感器和接触力传感器,无法很好的反映出患者肌肉的状态,解决不了上述问题。因此,基于生物电信号反馈的机器人系统是现在研究的热门。所以,本文针对基于肌电信号反馈的踝关节机器人进行了研究。
首先,本文对广义回归神经网络进行了研究,与表面肌电信号(Electromyography, EMG)的积分肌电值特征相结合,预测踝关节意图并触发踝关节康复机器人运动。其次,采用阻抗控制策略通过反馈影响机器人的运行,使运动遵循生理轨迹。最后通过对肌肉疲劳的评估分析出患者的疲劳状态,并且对应不同的疲劳状态,改变机器人的自适应阻抗控制的参数。在受试者运动过程中一直监控受试者的疲劳变化。当检测出患者进入疲劳状态后立刻停止康复训练。
关键词:康复机器人;肌电信号;踝关节意图识别;阻抗控制;疲劳评估
Abstract
The control strategies of traditional rehabilitation robots are transplanted from the control methods of the original industrial robots.They all have a high response speed and control accuracy.However,for rehabilitation robots,the flexibility of the system and the patient’s independent participation are important indicator of its performance.Because the patient does not have complete joint mobility and is prone to fatigue.If the patient performs a large angle, high speed, long training, the patient is prone to twitch and strain the muscles.Only rely on the force sensors and the position sensors can’t reflect muscle status well and they can’t solve these problems.Therefore, more and more scholars and experts have turned their attention to robot systems based on biological signal feedback.Therefore,this paper studies the robot for the ankle-based EMG feedback.
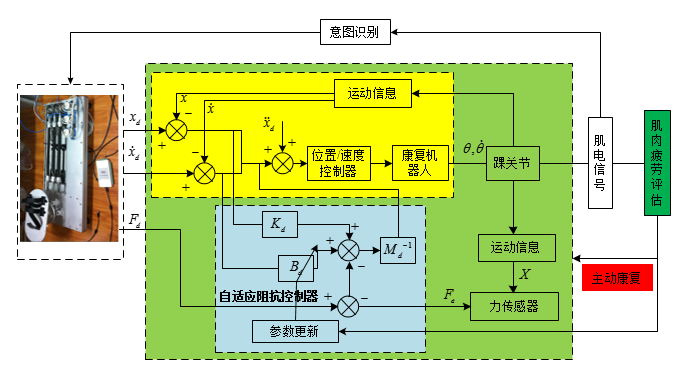
First,this paper studies the generalized regression neural network and combines it with the EMG signal's integrated electromyography feature to predict the ankle joint intention and trigger the movement of the ankle rehabilitation robot. Secondly,the impedance control strategy is used to influence the running speed of the robot through feedback so that the movement follows the physiological trajectory. Finally,the fatigue status of the patient is analyzed through evaluation of muscle fatigue,And corresponding to different fatigue states,parameters of the adaptive impedance control of the robot are changed.The patient’s fatigue will be monitored throughout the patient's exercise.When it is detected that the patient enters a state of fatigue, rehabilitation training is stopped immediately.
Key Words:Rehabilitation robot; EMG signal; Ankle joint intention identification; Impedance control; Fatigue assessment
目录
第1章 绪论 1
1.1课题研究的背景、目的与意义 1
1.2国内外研究现状 2
1.2.1 运动意图识别的研究现状 2
1.2.2 肌肉疲劳评估的研究现状 3
1.2.3 阻抗控制的研究现状 3
1.3论文的研究内容和结构安排 4
第2章 基于踝关节肌电反馈的信号处理方法研究 5
2.1基于EMG的踝关节运动意图识别 5
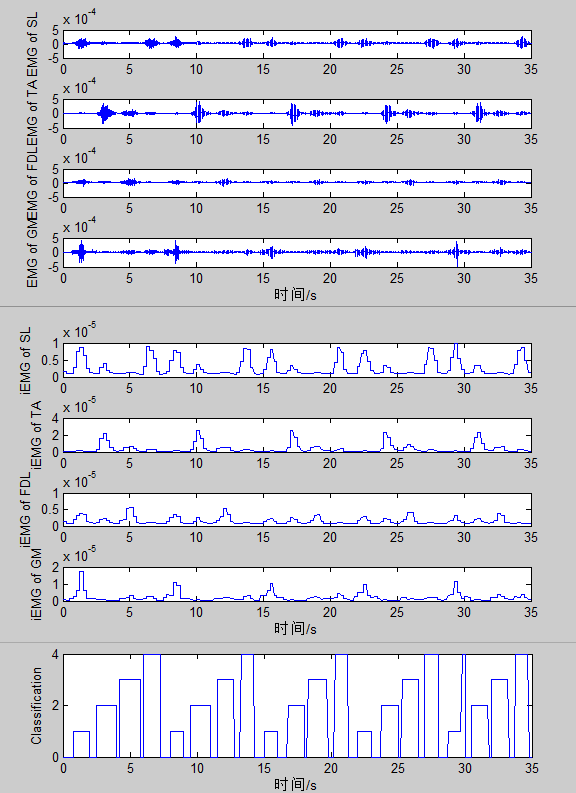
2.1.1 运动意图特征提取 5
2.1.2 运动意图特征分类 6
2.2基于EMG的动态疲劳评估 7
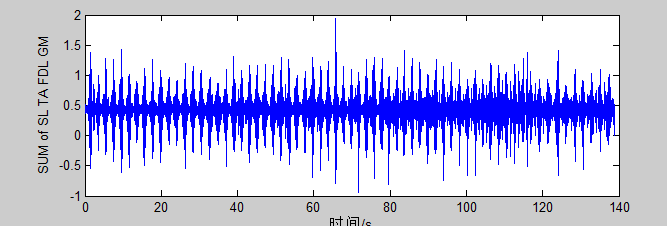
2.2.1 动作段检测 7
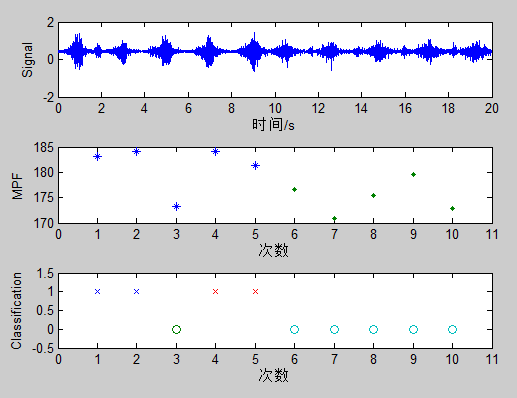
2.2.2 疲劳特征提取 8
2.3实验 9
2.4本章小结 13
第3章 踝关节康复机器人的肌电反馈控制策略 14
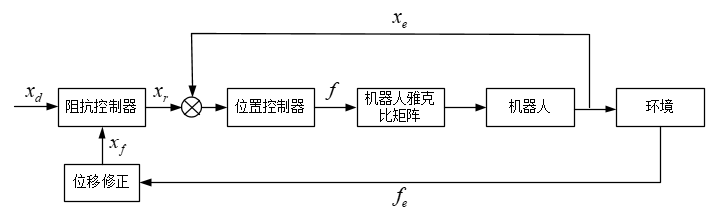
3.1基于交互力的机器人阻抗控制 14
3.2机器人阻抗控制模型 14
3.3实验 17
3.4本章小结 18
第4章 总结与展望 19
4.1全文工作总结 19
4.2下一步工作展望 19
致谢 21
参考文献 22
绪论
1.1课题研究的背景、目的与意义
根据世界卫生组织的报告,在2000-2050年期间年龄超过60岁的人口比例将从11%增至22%,届时,超过60岁的人口数量将达到20亿,全世界有超过一半(54%)的老年人生活在亚洲,22%的老年人生活在欧洲。许多的国家已经进入老龄化社会,在此期间,全球约有6.5亿残疾,占世界人口的10%,生活在发展中国家的残疾人占其中的80%。“2013中国残疾人统计年鉴”报告中显示中国总的残疾人数量为3795万人。随着人口老龄化和残疾人群的增加,这种衰退趋势将更加明显,这将会严重影响他们的日常生活。
目前,刚性驱动方式驱动的康复机器人占了大多数,如果患者在训练过程中对训练力和训练角度的调节不恰当,就很容易受再次受到伤害。针对这一问题,已经有以气动肌肉驱动的动康复训练机器人被研究开发了出来,气动肌肉是为了避免因为弯曲角度过大或者施力从而造成的二次伤害被研发出来的,它具有与人类肌肉输出特性类似的特点,因此可以提供的康复训练具有柔顺性;针对患者不同的康复需求,它还可以提供主动康复训练和被动康复训练等多种训练模式。基于这些研究,在确保安全、自然的康复训练过程的前提下,下一步研究的重点是进一步提高患者的主动参与性。
表面肌电图是一种微弱的电势,它是由这些细胞在电或神经活动时由肌细胞产生的,它是通过使用表面电极从浅层肌肉中检测到的。目前的研究表明,不同肌肉的表面肌电信号在频域范围内的幅值和功率谱分布都有明显的差异。在不同的运动模式下,同一块肌肉的肌力和它的表面肌电信号的时频特性之间存在着很大的线性关系,所以,康复机器人的控制领域中,分析表面肌电信号的时频特性,使得其可以得到很好的运用是现在研究的重点。例如,EMG有很多应用,例如医院的医生使用EMG来诊断神经和神经肌肉问题,生物医学工程师使用EMG作为假肢手,手臂,下肢或智能轮椅等假肢装置的控制信号。本文是基于肌电反馈的康复机器人控制研究,我们将重点放在通过使用EMG信号实施患者主动训练上。
表面肌电信号的采集系统分为软件和硬件两部分。软件部分主要实现了原始信号的采集,实时显示,输出数据分析结果分析数据等功能。硬件部分主要是采集电极,A/D转换模块,信号处理电路,信号传输电路和PC机组成。
传统上,EMG信号通常以三种方式用作控制信号。具体而言,对于第一方面,EMG信号通常用作开关信号,并且人体肢体的不同运动模式通过EMG信号进行区分。通过这种方法,可以用来识别患者的运动意图。高识别率和许多运动模式是这方面的两个目标。特征提取和分类方法是两个关键问题。例如,文献[14]提取均方根值的自然对数作为EMG特征,采用模糊C均值聚类方法对四种运动进行分类,识别率达到73.2%~92.7%。对于EMG应用的第二个方面,EMG信号用于估算肌肉力或扭矩。为此目的已经建立了许多肌肉力量模型,如Hill肌肉模型和Hammerstein肌肉模型。一旦找到确切的关系,通过EMG信号可以检测患者的活动力或扭矩,这些活动力或扭矩也表示患者的运动意图,并且常常以这种方式控制康复机器人的主动训练。例如,在文献[16]中,Christian提出了两种利用EMG对外骨骼机器人进行主动训练的方法,一种是动态人体模型,另一种是直接力控制,EMG信号是主要用于计算人体对机器人施加的力量。在本文中,使用广义神经网络来区分患者的运动意图并且作为开关信号开启康复机器人。对于第三方面,使用EMG信号来计算确切的身体姿势。这个问题也可以描述为根据EMG计算肢体关节角度。一旦找到确切的映射关系,外骨骼机器人或假肢装置可以在主动训练模式下被控制为任意可行的姿势。例如,在[17]中,Artemiadis提供了一个切换机制模型,用于将11个肌肉的EMG活动解码为3-D空间中手臂运动的连续表示,并且该方法提供了用于实时控制拟人机器人的接口。Ha提出了一种通过使用[18]中的EMG信号来提供动力膝关节假体的意志控制的方法,来自腿筋和四头肌的EMG信号被用于计算使用者的意图以及膝关节的设定角度,以及结果显示人们可以在轨迹良好的情况下控制动力膝关节假体。在本文中,则是采用表面肌电信号的特征通过广义回归神经网络来进行疲劳评估。
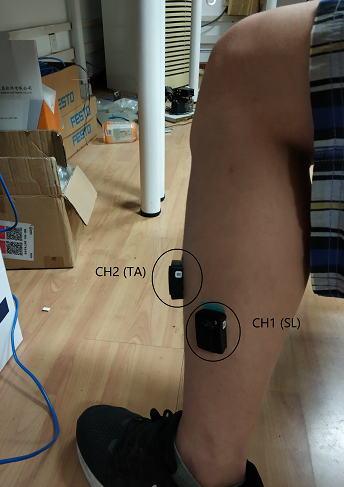
本课题旨在研究基于表面肌电信号的踝关节康复机器人控制系统。主要工作是在现有的踝关节康复机器人的基础之上,通过采集与踝关节相关的部分肌肉的表面肌电信号,从中提取肌肉各类信息的特征,并利用它们来实现对机器人的控制,最终,实现对受伤踝关节的智能康复训练。本课题的研究具有控制和机构学方面的理论价值和实际的应用价值。
1.2国内外研究现状
1.2.1 运动意图识别的研究现状
生物信号里面包含大量关于人体运动的信息。研究发现,表面肌电信号与肌肉活动和运动状态之间存在着很大的关联。表面肌电信号是利用电极从肌肉表面引导,记录神经肌肉系统活动的电信号。它是电极采集肌电信号时接触到的运动单元所发出的动作电位的总和。EMG 产生在肌肉收缩之前,所以它可以用来预测运动意图。使用肌电仪采集上肢相关肌肉的表面肌电信号之后,Hudgins和P.Parker等人提取其平均绝对值的变化率(MAVS)、平均绝对值(MAV)、信号的斜率变化、波形长度、过零点数作为特征值向量,使用多层感知器识别上肢假肢的四种动作模式。使用肌电仪采集上肢相关肌肉的表面肌电信号之后,K.Englehart和B.Hudgins等人提取信号的小波包变换系数(WPT)、小波变换系数(WT)和短时傅里叶系数(STFT)作为特征值向量,使用线性判别分析器来确定上肢假肢的六种动作模式。采用肌电仪采集相关肌肉的表面肌电信号之后,E.Lamouier和A.Andrade等人提取出信号的自回归系数(AR)作为特征值向量,对肌电假肢的四个类别的动作模式使用多层感知器进行判别。
综上所述,使用表面肌电信号的各种特征值对患者肢体的运动意图进行识别的研究已经有了一定的理论基础,并且国内外也做了大量的研究,本课题采用的肌电信号作为原始信号来预测患者的运动意图。
1.2.2 肌肉疲劳评估的研究现状
目前,在肌肉疲劳评估领域,国内外大多数研究人员的工作是探究那些指标可以更准确地评估肌肉疲劳,然而,关于这些指标是否可以成功用于在线评估肌肉疲劳却只有比较少的报道。但是,在现实生活中在线评估肌肉疲劳有着很重要的意义。比如,如果在训练时,患者无法感受到自己的肌肉疲劳程度并且训练器械中没有在线疲劳监测,那么患者肌肉就可能会因此再次受到损伤。针对这些问题,黄鹏等人使用肌电积分值、均方根、中值频率、过零率、均值频率等指标实现了便携式肌肉疲劳检测系统,用来实时评估肌肉疲劳;Chang K.M.等人通过监测中值频率用来实时评估肌肉疲劳,研制了无线肌电釆集系统;Chen S.W.等人通过实时分析肌电信号的和中位频率用来评估肌肉疲劳。
可以看出,国内外大多数疲劳评估的研究中,应用于实时评估肌肉疲劳时采用时、频域指标较多,可以可靠地评估肌肉疲劳状态。因此,本文也通过表面肌电信号的时、频域指标进行肌肉疲劳的评估。
1.2.3 阻抗控制的研究现状
在阻抗控制的研究中,首先,N. Hogan在1985年提出了阻抗控制的概念和基于机器人动力学模型的实现策略,对于柔顺性控制的发展有着很大的影响。后来阻抗控制有了更完整的总结,机器人的刚度控制是力与位置的转换;机器人的阻尼控制是力与速度的转换;而机器人的阻抗控制是力通过阻抗控制器实现与位置和速度的转换。
目前,Shahid Hussain等人设计了一个柔性步态训练矫正器和一个固有的轨迹跟踪控制器,但是矫正器和控制器只会针对矢状平面的髋关节和膝关节的运动进行主动控制。矫正器可以在最大适应性模式和最小适应性模式,这两种步态训练模下提供步态训练任务。在后面的实验评估结果中证明了,该矫正器可以在这两种步态训练模式下提供正常的步态训练任务。由于机器人的柔顺性得到了加强,使得受试者可以更自由地去训练。并且他们还基于基于自适应阻抗控制提出了一种自适应训练方法。根据患者的患病程度和患者的运动能力的差异该自适应阻抗方法可以调整康复机器人辅助患者运动的作用力。Shahid Hussain等人在十个正常的受试者中进行了实验,结果证明了,随着受试者的主动性的提高,机器人的辅助作用力会减少。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: