一种24 GHz连续波MIMO雷达的多通道收发电路设计毕业论文
2020-04-09 15:29:15
摘 要
实现了基于线性调频连续波(LFMCW)小型毫米波车载雷达系统前端的(T/R)有源电路设计。由DSP对该T/R电路发出逻辑控制指令,采用小数N分频锁相环频率合成技术,通过集成PLL芯片ADF4158产生上升锯齿调制波形依据频谱搬移原理对HBT工艺K波段VCO芯片CHV2411进行固定时间周期调制,将信号上变频至发送信号;并通过硅锗K波段双通道I/Q接收芯片BGT24MR2对回波信号进行下变频去斜处理;后经基带处理电路对中频基带信号进行信号处理。使用AD软件绘制PCB原理图,并实际投产。
最后所得电路指标可产生调制周期T为1.2 ms的锯齿形信号,Vpp为1.04 V。调制信号频率范围为24-24.24 GHz。接收模块可输出信号,基带处理部分可对中频信号进行放大。
该收发电路可初步实现各部分功能,为接下来关于车载雷达的研究打下基础。
关键词:车载雷达;T/R;FMCW;PLL
Abstract
A T/R active circuit of small millimeter wave radar system which is used in vehicle was implemented in this project, it is based on the principle of FMCW. The control command of the T/R is sent by DSP, it takes Fractional-N phase locked loop frequency synthesis technique. It generates the rising sawtooth wave by ADF4158 which is an PLL chip, and it is according to spectrum moving to use CHV2411 which is a k-band VCO chip made by HBT technology to do an fix time periodic modulation for carrier frequency signal, the modulation signal will be converted to the transmit signal; The BGT24MR2 which is a Silicon Germanium MMIC was used to receive the echo signal and stretching processing; after that the baseband processing circuit will process the intermediate frequency signal. The PCB schematic was made by AD, and produced by the PCB company.
Finally, the parameter of the circuit is that it can generate a sawtooth wave ,its period is 1.2ms and the Vpp is 1.04 V. The frequency range of transmit signal is from 24 GHz to 24.24 GHz. It can get the signal from the receiving module, the baseband processing section can amplify the medium frequency signal .
The T/R circuit can realize the functions of all parts, and make a good work for after study.
Keyword: vehicle radar; T/R; LFMCW; PLL
目 录
第1章 绪论 1
1.1 课题背景和研究意义 1
1.2 国内外发展现状 2
1.3 研究工作及章节安排 2
第2章 雷达工作原理 4
2.1 雷达波形的选择 4
2.2 调频连续波雷达工作原理 6
第3章 24 GHz车载雷达系统设计 11
3.1 雷达发射机 11
3.1.1 雷达发射机基本组成 11
3.1.2 雷达发射机主要指标 11
3.2 雷达接收机 12
3.2.1 雷达接收机的基本组成 12
3.2.2 雷达接收机的主要指标 12
3.3 器件的选择 12
3.4 车载雷达的指标 13
第4章 24 GHz车载雷达发射组件设计 14
4.1 调频发射信号生成模块 14
4.1.1 调制信号生成方式的选择 14
4.1.2 发射信号生成方式的选择 14
4.2 雷达发射机电路设计 15
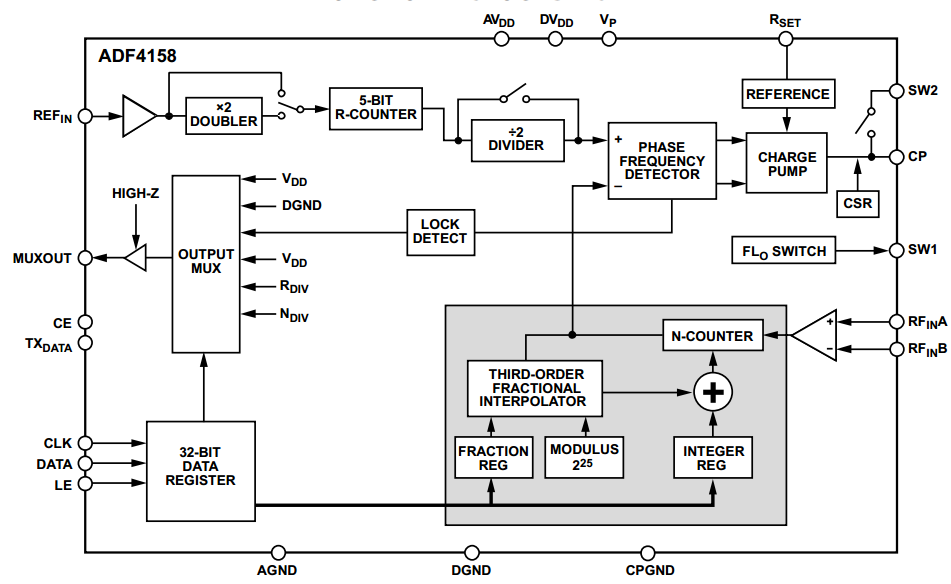
4.2.1 锁相环芯片分析 15
4.2.2 调制信号生成电路的设计 17
4.2.3 压控振荡器芯片分析 19
4.2.4 发射信号生成电路设计 21
4.3 雷达发射机整体设计 22
第5章 24 GHz车载雷达接收组件设计 23
5.1 雷达接收机电路设计 23
5.1.1 芯片选择 23
5.1.2 接收电路设计 24
5.2 基带处理电路设计 25
5.2.2 基带电路功能分析 25
5.2.3 基带电路设计 25
5.3 雷达接收机整体设计 26
第6章 24 GHz车载雷达收发电路测试 27
6.1 整版PCB 27
6.2 电路测试 27
6.2.1 调制信号测试 28
6.2.2 发射信号测试 29
6.2.3 混频输出信号测试 31
6.2.4 基带处理前后信号测试 33
第7章 总结和展望 34
参考文献 35
致谢 38
第1章 绪论
1.1课题背景和研究意义
近几年,互联网、通信等技术的不断发展,使得汽车工业的发展进入到崭新的阶段。同时,汽车智能化操作技术这个词正逐步渗透到生活中,这项技术不但使得驾驶汽车的过程更简化,还使得行驶安全性也更好,而这当中为众人所知的也是最热门的一个未来方向就是无人自动驾驶。无人自动驾驶配置一系列探测传感器如雷达传感器、摄像头等来获得当前的路况信息,并经智能化的无人自动驾驶系统计算分析,自动判断对路况进行的操作[1]。HIS信息公司推测,随着销量不断增加,第四级(完全自动驾驶)无人驾驶车到2035年后每年的销售量可达480万辆。国外大型汽车公司及IT巨头谷歌、亚马逊都争相研发无人自动驾驶技术,研发进展十分迅速,不少车型将要量产[2]。汽车自动驾驶能同人一样对周围环境做出判断,并迅速对不同情况做出反应,就需要利用多种传感器来实现对汽车信息和周围环境信息的获取。因此传感器技术是无人驾驶汽车的关键技术[3,4,5]。在众多传感器中毫米波雷达由于其可以在恶劣天气如雾、雨下正常工作和探测距离较远等特性而不可替代[6]。然而,毫米波雷达传感器对汽车的重要性远不止如此,它还可以对周围驾驶环境的安全程度,以及危险到来需要的反应时间做出判断,从而使驾驶人员提高警觉性并采取适当的预防措施来避免事故的发生[7]。因此毫米波雷达的使用主要领域是用于交通行驶安全。据公安部交管局统计显示,截至2017年第一季度,全国机动车保有量已超过3亿辆,汽车所占比例为三分之二。随之而来由机动车而造成的交通事故也日渐增多,给人们的日常生活带来巨大的伤害,所以汽车安全驾驶越来越成为人们比较关注的问题[8]。根据文献[9]了解由于交通事故,每年全球约125万人死亡,2000-5000万人受伤。据世界卫生组织2010年统计数据显示,道路交通事故造成的损失占到各国国民生产总值的3%左右。如果能够预先判断事故发生的可能性,并及时采取有效措施,可以大大降低事故发生率,所以毫米波车载雷达的重要性正在于此。
对于毫米波车载雷达来说,前端微波芯片是造成毫米波车载雷达性能差异的关键部件,然而该技术主要被国外芯片公司所垄断,国内在这个领域发展还不成熟。此外,汽车零件巨头对毫米波车载雷达的掌控不仅限于硬件工艺本身之外,还包括对于后端雷达信号的处理。目前,国内毫米波车载雷达的发展主要面临几个问题:1、整体竞争力较弱,相比于国外几十年的发展,我们才处于起步阶段。2、人才极度匮乏,大量该领域人才流失严重。3、资金压力大,车载雷达测试所需要的设备造价高,设计成本较大。4、开发周期较长,至少需要数年以上[10,11]。
基于这样的现状,本课题的将对车载雷达展开研究。根据文献[12]可知目前我国将24.25-26.65 GHz划分为短距车载雷达的工作频段。因此将以24 GHz作为毫米波车载雷达的基准工作频段。
1.2国内外发展现状
以上世纪中叶为起点,欧美就已经开始车载雷达的研制。车载雷达的工作频带由高频步入微波频段是发生在70年代。各种频段随着划分可以使用的不断减少,所以车载雷达工作频段经过不断的调整开始在17 GHz、24 GHz、35GHz、45 GHz、60 GHz、77GHz附近。而伴随着半导体集成技术以及数字处理技术的快速发展,在上世纪末,车载雷达首次实现商业使用。美国灰狗汽车公司率先在其运行汽车上共安装超过1600个汽车雷达系统,其在1993事故发生率比前年降低21%。1999年世界第一家汽车制造商梅赛德斯-奔驰在其S系列车型首次引入77 GHz自主巡航控制。在2003年日本两大汽车公司本田和丰田引入基于77 GHz长距雷达技术的主动制动辅助装置。美国现今汽车公司以及各大供应商已经致力于发展下一代的77 GHz车载雷达。新一代车载雷达将拥有更高的测量范围和测量精度[13,14]。
国内车载雷达探测设备研发起步较晚。起初研究主要是对西方车载雷达技术的学习研究,中科院上海微系统所使用MMIC技术开发出国内首个FMCW车用防撞雷达系统[15] 。东南大学毫米波实验室正在开展射频接收/发射前端的设计与研制。位于厦门的意行半导体公司,它是在国内目前拥有24 GHz车载雷达射频前端MMIC,沈阳承泰目前正在研发77 GHz汽车毫米波雷达[11] 。
1.3研究工作及章节安排
本课题的主要研究工作如下:学习24 GHz车载雷达的基本工作原理。完成24 GHz雷达收发电路的链路设计。绘制PCB原理图并联系生产厂商完成实物电路板制作;对实物电路板进行指标测试,根据测试指标分析24 GHz车载雷达设计是否满足预先要求。研究最后实现了一个24 GHz车载雷达多通道收发电路。
文章的结构安排如下:第一章为绪论,主要介绍项目的背景以及研究的意义。第二章为雷达原理的说明,采用软件来进行辅助分析。第三章24 GHz车载雷达系统设计。第四章24 GHz车载雷达发射组件设计。第五章24 GHz车载雷达接收组件设计。第六章对实物电路进行测试。第七章是对整个研究的总结,并指出未来更进一步的研究方向。
第2章 雷达工作原理
2.1雷达波形的选择
雷达工作原理是通过电磁波对物体反射前后的变化来获得目标信息[16]。首先假设该雷达天线为全向天线(即在任何反向辐射均匀的能量),因此对空间任意点的峰值功率密度表示如下:
 (2.1)
(2.1)
假设观测目标与雷达的距离为R,那么目标所在位置的功率密度(假定传输过程中介质的损耗忽略不计)为:
 (2.2)
(2.2)
此时若采用天线不是全向而是有方向性的天线,我们需要对上述功率密度进行修正,方向性天线增益可以表示为:
 (2.3)
(2.3)
其中有效孔径 可以用
可以用 表示
表示 为物理孔径。此时功率密度可以修正为:
为物理孔径。此时功率密度可以修正为:
 (2.4)
(2.4)
目标物体辐射能量的多少与多种因素有关,如目标的大小、指向、形状、材料等,这些因素的总和我们可以用 表示,
表示, 在雷达体系中被称作雷达截面积
在雷达体系中被称作雷达截面积 ,其定义为反射回雷达的波的功率与入射目标的功率密度的比,可以表示为:
,其定义为反射回雷达的波的功率与入射目标的功率密度的比,可以表示为:
 (2.5)
(2.5)
通过一个变量代换我们可以得到接收天线的输出功率为:
 (2.6)
(2.6)
通过再经过一个变量代换,我们可以得到最终的表达式:
 (2.7)
(2.7)
上述表达式即雷达理论中用于估计接收信号接收功率大小的雷达方程[17]。观察公式可以粗略估计雷达的接收功率与距离成四次方反比关系。接收端信号变化范围跨度极大,随着距离的变化易导致系统饱和,为了使系统正常工作需调节对幅度变化进行调节。
雷达系统依据发射波形可分为脉冲雷达和连续波雷达[18],脉冲雷达出现较早,相应技术较为成熟但其也有局限性。
1.随工作距离增加发射功率急剧增大。早期雷达工作距离较长,作用距离从几km至几百km。脉冲雷达平均发射功率由下式计算:
 (2.8)
(2.8)
其中 为脉冲占空比。常规脉冲雷达占空比通常为0.001。因此脉冲雷达的发射功率普遍很大,发射功率大使电源设计更复杂。
为脉冲占空比。常规脉冲雷达占空比通常为0.001。因此脉冲雷达的发射功率普遍很大,发射功率大使电源设计更复杂。
2.脉冲雷达发射和接收不能同时工作。对接收信号处理时会产生距离盲区。
为克服脉冲雷达缺陷,研究人员提出连续波雷达(CW)。相比于于脉冲雷达,连续波雷达拥有诸多优点:
1.连续波雷达发射功率远小于脉冲雷达。连续波占空比为1,同样的平均发射功率条件下,连续波峰值功率远远小于脉冲雷达,所以功率部分设计所需复杂性远小于脉冲雷达。
2.连续雷达共用收发天线。通过环形器可使收发同时工作,无距离盲区,作用距离能覆盖全范围。
正是由于连续波对比脉冲拥有诸多优点,因此现在连续波雷达广泛应用。一个常见的连续波雷达系统如图所示:
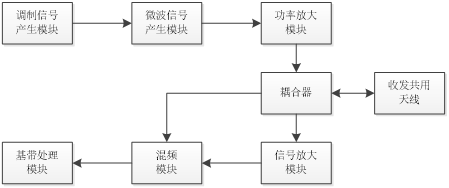
图2.1 连续波雷达框图
2.2调频连续波雷达工作原理
依据调制信号的不同连续波雷达也有不同的分类[19],但本课题拟采用线性调频连续波(LFMCW)。LFMCW雷达的数学原理在文献[20,21]中有详细描述,为了过程更直观,我将使用MATLAB仿真结果进行分析。调制信号为周期信号,这里只取一个周期进行分析。
1、调制发射信号
线性调频连续波的调制信号采用锯齿波。锯齿波形相对于三角波的优点是使周期时间减半,为后续数据处理预留更多时间和存储空间,锯齿波形可以配合使用二维FFT雷达处理算法[22] ,该算法不仅适合复杂噪声背景下的信号提取还具有比三角波形求速度更高的精度。调制信号的数学表达式是下式:
 (2.9)
(2.9)
其中 , B为调制带宽, T为调制周期。相应的t的取值范围为
, B为调制带宽, T为调制周期。相应的t的取值范围为 。调制信号是呈锯齿波形变化,相应频率变化由低到高。发射频率可以由下式表示:
。调制信号是呈锯齿波形变化,相应频率变化由低到高。发射频率可以由下式表示:
 (2.10)
(2.10)
相位变化可以表示为对频率的积分,因此由式2.10得:
 (2.11)
(2.11)
由式2.11我们可以得到发射信号的表示形式:
 (2.12)
(2.12)
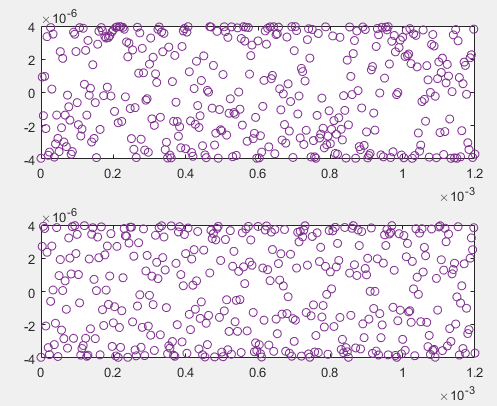
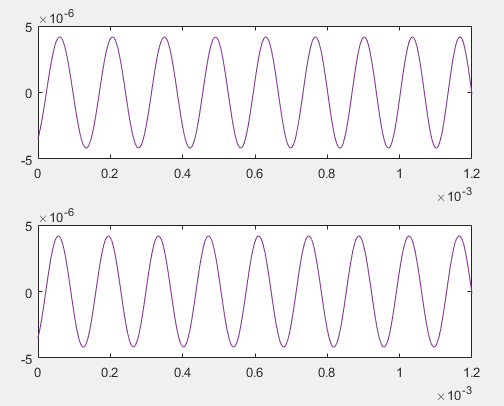
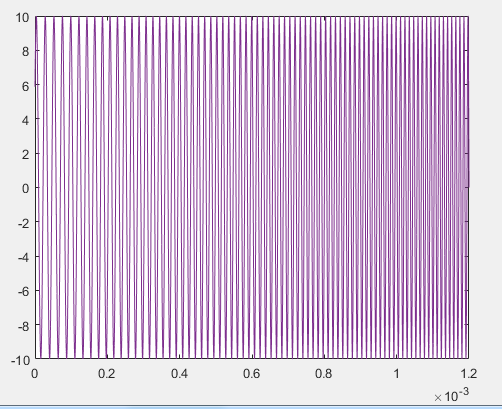
其中A为发射信号的幅度, 为发射信号的初始相位设为0,
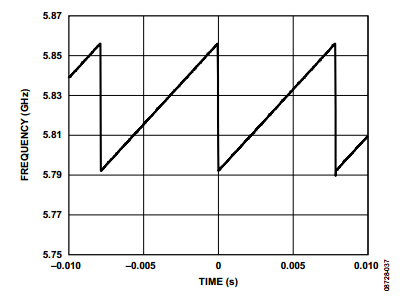
为发射信号的初始相位设为0, 是起始信号频率,这里取其为24 GHz,调制带宽B取200 MHz,调制周期T取1.2 ms。仿真波形如下:
是起始信号频率,这里取其为24 GHz,调制带宽B取200 MHz,调制周期T取1.2 ms。仿真波形如下:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: