基于微波循迹的自动引导车辆智能控制算法研究毕业论文
2020-02-19 20:38:23
摘 要
AGV(Automatic Guided Vehicle)是配备自动导引装置,能够装卸、搬运货物的无人驾驶运输车。它具有及时避让、安全保护等装置,能够按照既定的路径行走,在柔性自动化系统中扮演着很重要的角色。
本文在理学院以前学生设计的自动导航小车的经验和技术的基础上,针对设计新型自动导引车的要求,结合了嵌入式控制系统、传感器检测技术,设计出了基于微波循迹的自动导引小车。并且在自己搭建的跑道场地上,经过调试和检测,完成基本的循迹功能。
- 本文简要介绍了AGV当前发展的现状以及未来发展的趋势。同时本文还说明了该课题研究的意义以及其主要内容。
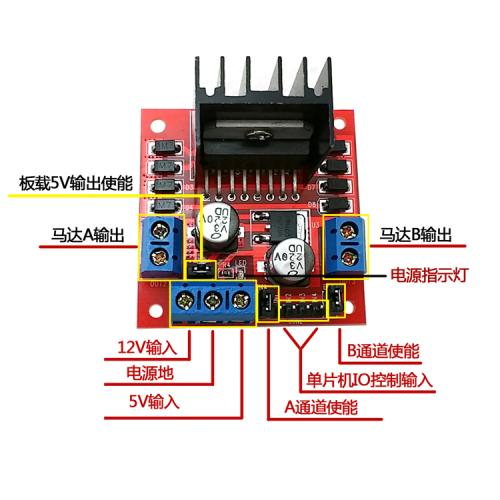
- 本文设计了基于微波循迹的小车总体系统,包括小车的驱动系统,探测系统,以及控制系统等。小车驱动芯片采用的是L298N,小车主要基于车身上的HB100芯片对地面铺设金属箔的检测,然后通过控制系统调节小车的驱动系统,达到循迹的效果。
- 铺设的场地主要是塑料跑道上贴一层金属箔,金属箔的宽度小于跑道,和车身宽度保持一致,同时也是为了使车身上三个HB100芯片刚好能够检测到金属箔。
- 本文主要对车身上STM32F4芯片编程,编写了相关的驱动、控制、检测代码。
- 本文会对小车的实际调试简要描述,并对调试结果进行了分析和判断。调试结果表明,该AGV基本满足课题的要求,能完成简单的金属循迹自动导引。
关键词:AGV;微波循迹;L298N;STM32F4;HB100
Abstract
AGV is a driverless transport vehicle equipped with automatic guidance device, which can load, unload and carry goods. It has such devices as timely avoidance, safety protection and so on. It can walk along the established path and plays an important role in the flexible automation system.
Based on the experience and technology of the auto-guided car designed by the students in the College of Science, aiming at the requirements of designing a new type of auto-guided car, this paper designs an auto-guided car based on microwave tracing, combining the embedded control system and sensor detection technology. And on the runway site built by ourselves, through debugging and testing, the basic tracing function was completed.
- This paper briefly introduces the current situation and future development trend of AGV. At the same time, this paper also explains the significance of the research and its main contents.
- This paper designs the overall system of the car based on microwave tracing, including the driving system, detection system and control system. The car driver chip is L298N. The car mainly detects the metal foil on the ground through the HB100 chip on the car body, and then adjusts the driving system of the car through the control system to achieve the tracking effect.
- The main site is to lay a layer of metal foil on the plastic runway. The width of the metal foil is smaller than the runway, which is consistent with the width of the car body. At the same time, the three HB100 chips on the car body can detect the metal foil exactly.
- In this paper, the stm32f4 chip on the body is programmed, and the relevant driving, control and detection codes are compiled.
- In this paper, the actual debugging of the car will be briefly described, and the debugging results will be analyzed and judged. The debugging results show that the AGV basically meets the requirements of the project and can complete simple automatic metal tracking guidance.
Keywords: AGV; Microwave tracking; L298N;STM32F4;HB100
目 录
第1章 绪 论 1
1.1 引言 1
1.2 国内外研究发展现状 1
1.3 AGV导引技术简介 2
1.4 本文主要研究内容和研究意义 3
第2章 AGV的硬件设计 5
2.1 AGV的功能设计 5
2.2 AGV的结构组成 5
2.2.1 AGV的控制模块 5
2.2.2 AGV的驱动模块 7
2.2.3 AGV的微波发射模块 8
2.2.4 AGV的微波信号处理模块 8
2.3 小结 9
第3章 AGV的软件设计 11
3.1 AGV的软件功能设计 11
3.2 PWM技术介绍 12
3.3 AGV的软件系统组成 13
3.4 小结 14
第4章 AGV的场地制作和测试 15
4.1 AGV的轨道设计 15
4.2 AGV的测试情况 15
4.3 小结 17
第5章 总结与展望 18
5.1本文总结 18
5.2 展望 18
参考文献 20
致谢 21
第1章 绪 论
1.1 引言
21世纪,随着工业4.0的提出和智能化及自动化制造的需求,AGV的研究和发展已经愈发显得迫切和必要。同时随着工业自动化技术的发展,生产环境和结构的日益复杂,国内外劳动力成本的日益上升,对于各种新型AGV的研究也成为越来越热门的课题。
在 20 世纪的自动控制领域人们一致认为机器人的出现及其控制理论的发展是具有划时代意义的重大成就,同时也代表着 20 世纪人类科技的重大技术进展[1]。AGV作为移动机器人其中一个分支,是一项涉及到计算机技术,人工智能技术,传感技术,自动控制技术的大型综合系统。AGV技术的发展主要有以下一些特点:第一,高度自动化,自动引导智能小车能够自动控制车速,自动识别路径,自动转向等;第二,智能化程度越来越高,自动引导智能小车具有环境感知、自动规划路线以及对于外界因素突发改变有一定的决策判断能力。第三,柔性化程度越来越高,自动引导智能小车能够适应各种复杂环境以及任务要求。正是具有以上各种特点,AGV越来越广泛应用于各行各业,在工业、医疗、运输、军事等都得到了充分的利用,对人们生产生活方式的改变产生了深远影响。
1.2 国内外研究发展现状
AGV小车是一种具备自动导航技术的无人驾驶运输车。它能够按照设定好的路径行走,同时能够感知周围环境,作出及时避让,停止运行等动作。目前的AGV大多采用电池供电,成熟的导引方式有激光导引、电磁感应导引、磁感应导引、光带感应导引,驱动方式主要包括单舵轮驱动、双舵轮驱动和差速驱动及多舵轮驱动等四种方式,电机驱动总成由减速机构和伺服电机组成,通讯系统采用无线通讯,大多采用802.11b/g无线以太网标准协议的通用无线系统[2]。现在工厂大多使用多台AGV在同一空间联合行使任务,这就需要应用到自动导航车系统AGVS,AGVS能够远程控制每辆单机小车,完成任务分配和交通管制,完成各类复杂的综合型任务。
世界上第一台由牵引方式自动引导的搬运车由美国的 Barrett 公司于20世纪50年代开发问世[3]。该小车具备基本的无人驾驶功能,运行在特定设计好的平台线路上。而到了上个世纪六七十年代,欧洲国家对AGV的相关技术要求提出了标准化规范[4]。AGV便进入到标准化工业化生产时期,在70年代中期就已经广泛于欧洲发达国家的机械制造、医疗卫生、食品生产、服装加工等行业。70 年代后期,研究人员利用视觉传感器采集环境图像技术,研制成功了一种基于视觉识别特定图像技术的机器人 Cart[5] 。在欧洲 AGV的技术标准规范基础上,美国的各家大公司积极研究相关技术,先后产生50多家生产AGV的厂商。其中美国通用公司可以作为典型,从1984年起就开始成为应用AGV最多的企业之一,多达千余台,极大地促进了AGV技术的成熟和普及,也成为为AGV极大提高工业生产效率的实例。与此同时,日本也开始在AGV系统的研发中加大投入,日本的AGV技术和应用也开始进入高速发展时期。在1981年到1985,日本AGV销售额从60亿日元以平均每年20%的速度递增到200亿元,住友重机、神钢电机、平田电机等27个主要生产厂商能够生产几十种不同类型的AGV[2]。到了90年代初期,随之激光技术应用的成熟,在瑞典的 NDC公司研制成功了采用激光导引的新型AGV。进入新世纪后, Egmin 公司融合了激光制导以及惯性导引技术,设计出了一款全新概念AGV导航系统。近些年,AGV视觉导引技术发展取得很大的突破,涌现出了一系列具有创新性和高技术含量的研究成果。如由日本大阪大学开发研制的一种新型视觉导引 AGV 系统,具备强大图形处理器和特定设计摄像机,能够旋转获取周边环境图像,通过单目视觉定位测距;卡梅隆大学设计出一种具备立体视觉的视觉导引无人驾驶车辆,可以在未来应用于5G和物联网时代的大规模人工智能无人车领域;此外,由美国NASA研制的“机遇号”和“勇气号”火星探测器,都具备视觉导引功能,能够适应火星地表复杂多变的环境,执行各种探测采集任务[6]。
我国虽然在AGV行业起步较晚,相关技术的研究和发展比较滞后,但是也在逐年加大相关研发经费,在各行各业的应用也越来越广泛。在我国,第一台基于电磁导引技术的AGV由北京起重运输机械研究所于1976年研制出[7]。80年代末,邮电部北京邮政科技研究所开发出了能够同时满足双向通信控制的 AGV,于1991年投入了运行。进入新世纪来,涌现出了一大批能够生产AGV的企业,以中国一汽、百度、新松、华晓精密等为代表,研制出了各种类型的AGV。同时,国内各高校也广泛开展了AGV的研究。90 年代,清华大学应用进口的 AGV 系统进行了 CIMS 可行性验证[8],吉林大学、国防科技大学、南京航空大学先后都自主研发了图像识别原理的视觉导航小车。2006年,我国开始举办“飞思卡尔”全国智能小车竞赛,该赛事是由教育部高等学校自动化专业教学指导委员会主办,在飞思卡尔半导体公司资助下举办的[9]。
目前,我国的AGV的研发水平相比于欧美、日本还是处于相对较低的层次,而且应用规模小,自主知识产权少,制造水平低,远远满足不了我国实际的工业发展需求。所以我们必须进一步加大对AGV技术的研发力度,争取在未来这一领域能做到弯道超车,实现后发制人,这也是中国制造2025[10]的重要内容之一。
1.3 AGV导引技术简介
AGV的核心技术就是其导引技术,导引方式直接影响着其设计出小车的运行可靠性和实际性能表现,所以对AGV系统的导航方式的选择和开发就显得尤为重要。目前AGV比较常见的导引方式有:电磁感应导引、光学导引、激光导引、视觉导引、惯性导引。
电磁感应导引主要就是在AGV的行驶路径上埋设金属导线或电缆,并在其中通过低频电流,在导线周围产生电磁场,然后通过车载感应线圈检测电磁场强度强弱,识别出导引路径,实现AGV的导引。目前,电磁导引技术比较成熟,应用也最为广泛。此种导引方式优点是由于该种导引方式的导引电缆比较隐蔽,容易解决其受污染和影响导航的外界环境因素的问题,导线电缆的制造成本也较低。其缺陷是工作路径更改非常麻烦,费时费力,所需成本也很高。这种导引方式适用于一些路线简单而且需要连续工作的工况。
光学导引原理主要是在AGV的行驶路径上粘贴色带或喷涂油漆,然后通过光学传感器识别由摄像头采集的图像信号,将识别结果送向小车的控制器进行分析处理,再由控制器完成对小车动作指令的调整实现导引作用。这种导引方式的优点是灵活性好,地面路径铺设也比较容易,缺点是对环境要求比较严格,对物理损伤非常敏感,当铺设的色带污染比较严重时,会严重影响导引的可靠性,且这种导引方式的精度不够高。
激光导引原理主要是在AGV行驶路径的周围安装特定位置的激光反射板,通过AGV上装备有的激光发射和定位装置发射激光束,并且通过不同角度不同位置的反射板反射回来的信号,再根据对应的几何算法来定位自身,实现AGV的导引[2]。目前,这种导引技术也比较成熟,应用也比较广泛,它的主要优点是定位精确,无需预先铺设定位导引带,行走路径更改灵活,适用范围广,缺点主要是成本偏高。
视觉导引原理主要是给AGV装备CCD摄像机,在行驶过程中通过分析周围环境图像信息定位。通常可以把基于视觉的导引又称为基于图像的识别导航按其实现形式划分为基
于标示线的导引方式和没有实际标示线的导引方式[11]。这种导引方式的优点是导引路线变更灵活,适用范围广,缺点是成本高,且图像处理技术仍不够成熟,这种导引方式未能进入大规模的实用阶段,但是其应用前景极为广阔。
惯性导引原理主要是利用安装在AGV上的陀螺仪和行驶路径周围的定位块完成对信号的计算和采集,确定自身的位置和方向,达到AGV自动导引的目的[12]。这种导引技术是AGV领域一项新兴技术,其主要优点是定位精度高,灵活性较强。随着惯性敏感元件的发展以及对应成本的降低,这种技术的前景无疑也是极其得广阔。
1.4 本文主要研究内容和研究意义
近年来,自动引导车辆广泛应用于工业制造、物流、以及交通等领域中,能够大大提升了工作效率。特别是在物流方面,自动引导小车 (AGV) 高度的灵活性和低能耗可较好的适应现代物流“多品种、小批量、相对集中”的特点[13]。在这些行业中, AGV 的应用大多表现出工作独立, 固定轨道, 行驶速度慢以及密集度低等特点[14,15]。目前,成熟的AGV引导技术包括有电磁感应引导、磁带/磁条引导、光学引导、视觉引导、以及GPS引导和惯性引导等。上述引导方式显然对于引导环境都具有较高的要求,在光线不均匀(不佳)或信号不强时,存在引导失效或失误的问题,然而这对于微波检测金属导带从而引导车辆行进的方式来说不是问题,而且受环境影响较小。本课题计划在模拟车行进路轨上铺设金属导带,利用微波对于金属敏感产生反射的特点,同时结合智能算法,控制车辆循迹行进,通过模拟调试,设计并改进出基于微波反射方式的自动引导车辆智能控制算法,为未来实现新型的车辆无人驾驶技术提供参考和可能。
第2章 AGV的硬件设计
2.1 AGV的功能设计
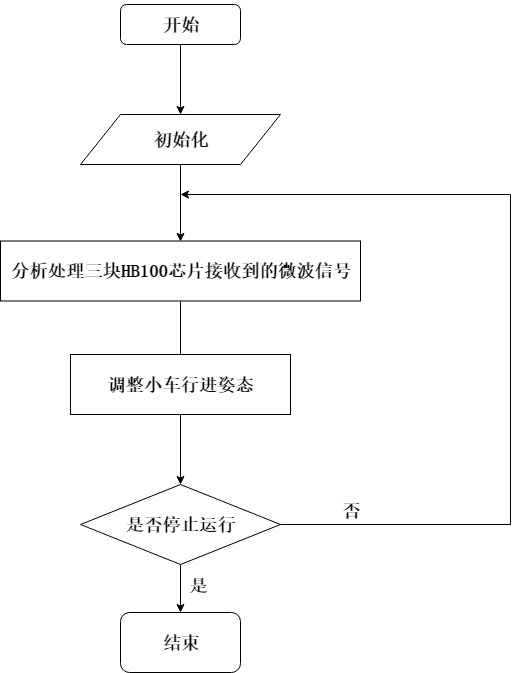
本文所述智能小车主要微波探测技术,通过一对微波天线在铺有金属导带的轨道上发射特定频段的微波,再利用微波接收模块检测铺设轨道上的金属导带反射回来的微波信号,然后把信号送到小车的控制模块,对小车的运行方向和速度进行调整,从而达到循迹的目的。
2.2 AGV的结构组成
智能小车的结构组成如图2.1所示,由控制模块、驱动模块、微波发射模块、微波信号处理模块这几部分组成。
微波发射模块
驱动模块
控制模块
微波信号处理模块
图2.1 AGV的结构组成
2.2.1 AGV的控制模块
智能小车的控制模块主要基于STM32F407ZGT6单片机,通过向STM32F407ZGT6单片机写入特定算法,完成对小车的驱动控制、微波发射和微波检测等功能的实现。STM32F407ZGT6单片机实物如图2.2。
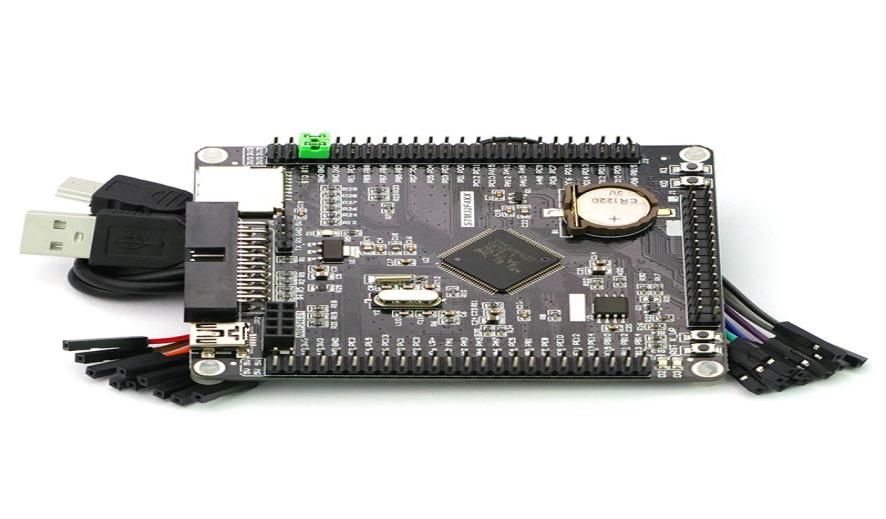
图2.2 基于STM32F407的单片机
STM32F407ZGT6芯片管脚图如图2.3,内核包括32位高性能ARM Cortex-M4处理器,时钟频率高达168MHz,支持FPU和DSP指令,包括144引脚 114个IO口,支持SWD和JTAG调试,3个12位AD,2个12位DA,16个DMA通道,定时器多达17个,通信接口多达17个。
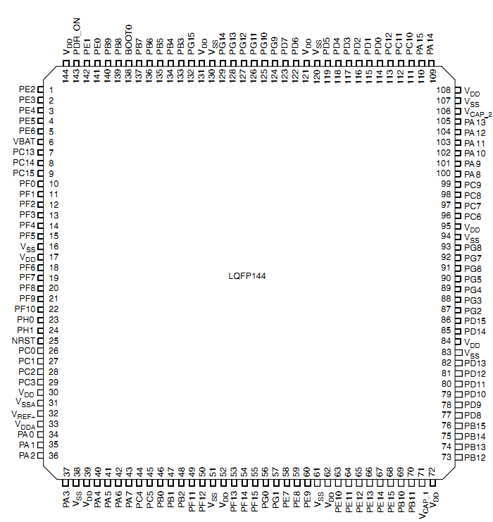
图2.3 STM32F407ZGT6芯片管脚图
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: