基于MATLAB软件的无人船舶路径规划研究与实现毕业论文
2020-02-17 23:13:45
摘 要
“互联网 ”,“智能 ”,“AI/IOT”等全新概念的提出和云计算、边缘计算以及5G等新技术的应用实现,通过新技术提升全要素生产率,已经成为优化经济结构、驱动传统产业转型升级的国家战略。而船舶产业作为我国一大传统行业,如何在新时代下实现船舶产业的转型升级,实现船舶的自动化、智能化与数字化已经得到社会的日益重视。
无人船舶的路径规划,不仅是船舶产业转型升级的重要内容,也是无人船舶研究的重要技术,其规划出的航线准确精度与适用性不仅决定无人船舶自身是能否安全可靠到达目的地,而且关乎船舶产业转型升级的速度。在本文中,主要研究无人船舶的路径规划,首先通过坐标定位法来精准地模拟海域环境中的静态与动态障碍物所在的位置;而后通过深入地分析研究船舶的操纵运动方程,建立无人船舶的动力学特性数学模型,以模拟无人船舶在航行中的运动状态;接着通过使用动态窗口算法规划探索航行路径,利用窗口周期探测出模拟海域环境上的静态与动态障碍物,并加入紧急避碰策略,使其在航行过程中与动态障碍物相遇时能够改变航行速度;最后,通过在MATLAB R2019a平台上仿真模拟,证明无人船舶通过动态窗口算法可以准确地规划出安全可靠的航行路径,并在遇到动态障碍物时能够实现紧急避碰,从而安全地到达目的地。
关键词:无人船舶;路径规划;动态窗口法;紧急避碰
Abstract
The introduction of new concepts such as "Internet ", "Smart ", "AI/IOT" and the application of new technologies such as cloud computing, edge computing, 5G, and so on. Enhancing total factor productivity through new technologies has become a national strategy to optimize the economic structure and drive the transformation and upgrading of traditional industries. As a large traditional industry in China, how to realize the transformation and upgrading of the shipbuilding industry in the new era, and realize the automation, intelligence and digitization of ships has been paid more and more attention by the society.
The path planning of unmanned ships is not only an important part of the transformation and upgrading of the shipbuilding industry, but also an important technology for the research of unmanned ships. The accuracy and applicability of the planned routes not only determines whether the unmanned ships can reach the destination safely and reliably, but it is related to the speed of transformation and upgrading of the shipbuilding industry. In this paper, we mainly study the path planning of unmanned ships. Firstly, we use the coordinate positioning method to accurately simulate the position of static and dynamic obstacles in the sea environment. Next we analyze the ship's maneuvering equation by in-depth analysis to establish the unmanned Mathematical model of the dynamic characteristics of the ship to simulate the motion state of the unmanned ship during navigation. Then we use the dynamic window algorithm to plan the exploration of the navigation path, use the window period to detect the static and dynamic obstacles in the simulated sea environment, and join the emergency the collision avoidance strategy can change the speed of navigation when encountering dynamic obstacles during navigation. Finally, through simulation on MATLAB R2019a platform, it is proved that unmanned ships can accurately plan safe and reliable navigation path through dynamic window algorithm, and when encountering a dynamic obstacle, it can achieve emergency collision avoidance, so as to reach the destination safely.
Key Words:Unmanned ship;Path planning;Dynamic window method;Emergency obstacle avoidance
目 录
第1章 绪论 1
1.1 课题研究背景及意义 1
1.2 国内外研究现状 2
1.2.1 国外研究现状 2
1.2.2 国内研究现状 3
1.3 研究内容和论文结构 4
第2章 路径规划研究及环境建模 6
2.1 路径规划概述 6
2.2 船舶路径规划应用 6
2.3 海域环境建模 7
2.4 本章小结 11
第3章 无人船舶动力学特性建模 12
3.1 船舶动力学特性建模思想 12
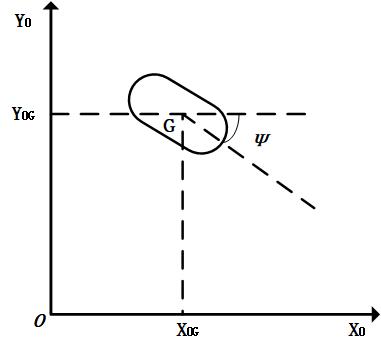
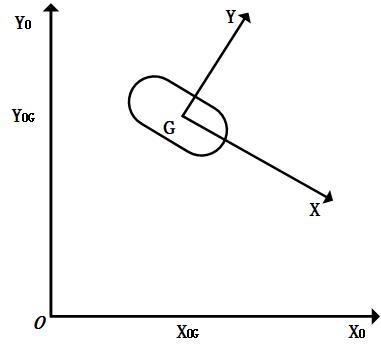
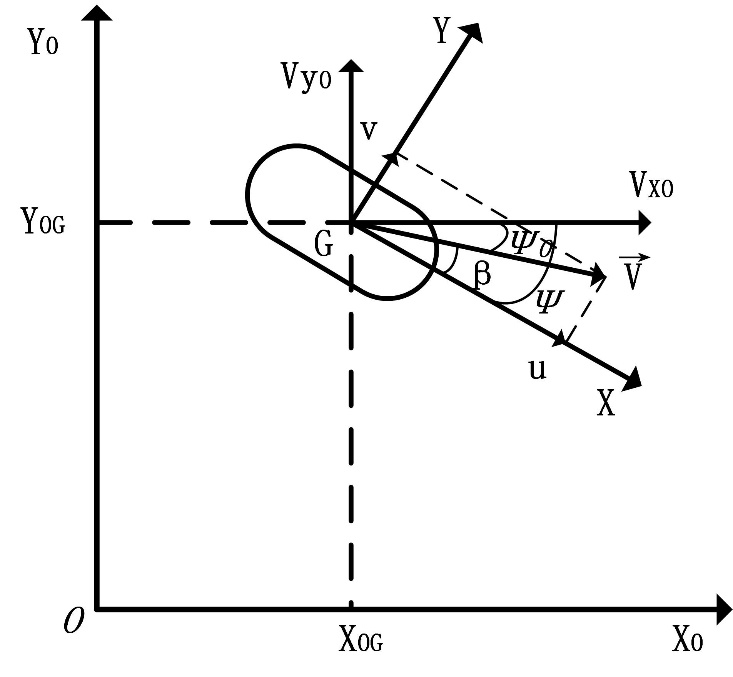
3.2 坐标系建立 12
3.3 船舶动力方程 14
3.4 本章小结 16
第4章 基于动态窗口的路径规划算法 17
4.1 原理流程 17
4.2 原理实现 18
4.2.1 航行轨迹模型 18
4.2.2 船舶速度采样 19
4.2.3 评价函数 20
4.3 本章小结 21
第5章 实验仿真与结果分析 22
5.1 无人船舶路径规划流程 22
5.2 仿真与结果分析 23
5.3 本章小结 28
第6章 总结与展望 29
6.1 工作总结 29
6.2 展望 29
参考文献 31
致谢 32
第1章 绪论
1.1 课题研究背景及意义
随着科学与信息技术的飞速发展,越来越多的军事设备、工业设备、生活设备都正朝着自动化、智能化的方向快速发展,加上5G通信网络、人工智能、云计算、物联网以及边缘计算等新技术的出现以及研究的深入,“海陆空”之中的无人驾驶飞机,无人驾驶汽车的技术日趋成熟,其商用产品也呼之欲出,“海”中的无人船舶研究也正如火如荼地进行,传统产业转型势不可挡,让人触手可及的智能化社会即将到来。
我国作为一个海洋大国,海域面积辽阔,海底资源丰富,并随着“中国智造2025”,“智慧交通”,“海洋强国”等国家战略规划的实施,如何实现我国船舶行业的自动化,智能化和数字化,得到了社会越来越多的关注,智能船舶、无人船舶研制技术成为了当下的一个研究热点。
无人船舶与智能船舶研制技术的发展,是对“科学技术是第一生产力”思想的一种创新实践,对实现祖国和平稳定,繁荣昌盛,实现中华民族的伟大复兴有着重要意义。在领土保护方面,为无人船舶制定航海路线,利用无人船舶对我国海域进行监测,为侵略者的入侵发送预警,为保护我国领土领海主权,对打造海洋强国,海军强国,实现海军智能化时代有着极其重要的作用;在资源探测方面,我国海域面积辽阔,海洋资源丰富,利用无人船舶对相关海域进行资源的探测,为其设定航行路线,特别是在一些未知的危险海域,可以更方便对我国的海域资源进行探测,为资源探测人员提供保护,为后续实现海洋资源的开采提供重要线索;在经济贸易方面,随着经济贸易全球化以及航运业金融危机的日益加强,商品的分工合作已成定势,船舶运输作为一种重要的运输方式,具有运量大,价格便宜的优势,越来越多的贸易选择其作为运输方式,而利用无人船舶进行运输,为其规划好航行路线,为小量,甚至大量物资的运送带来可能,不仅节省了人力和物力的成本,还能节能减耗,减少船运事故的发生,为贸易往来带来实惠便捷的帮助,可更好地实现了经济利益最大化。
路径规划与紧急避碰作为无人船舶技术的一个关键点,它旨在出航前为开始点和目的点之间规划出一条无障碍的,安全可行的航线,并且如果无人船舶在航行中遇到了紧急的情况,能自主紧急地避开障碍[1]。它的准确精度以及灵敏度不仅关系着无人船舶能否到达目的点,而且还关系着无人船舶自己本身能否安全[2]。因此,为了实现我国船舶行业的智能化转型,更好地解决无人船舶在路径规划和紧急避碰技术上的困难,所以展开了本次课题的研究。
1.2 国内外研究现状
1.2.1 国外研究现状
在国外,发达国家对无人船舶技术的研究起步早,尤其是美国和以色列,其在国际上处于领先的地位。
 美国,当今世界唯一的超级大国,在无人船舶的研制上早已先发于人,其研制的无人艇船队,首先应用的就是在军事工业领域,并且取得重大成果[3]。早在20世纪60年代,在越南海域内就布置了“拖链式”遥控艇,用于战场的扫雷作业;1997年,NavTec公司研发出“Owl MK Ⅱ”号无人艇,拥有声呐扫描和海上侦察监视功能;2003年,美国水下作战中心研发出“斯巴达侦察兵”无人艇,不仅拥有着扫雷和侦察监视功能,还拥有着反潜和精准打击功能;2010年,通过升级改造的“水虎鱼”无人艇,更是拥有着一系列的伪装技术,从而实现“隐身”的功能;2014年,美国无人舰艇不仅拥有着保护本方舰艇的能力,还拥有能发起“蜂群战术”自主攻击的能力;2016年,美国下水最新型的“海上猎手”无人反潜船,如图1.1所示,其是世界上最大的无人驾驶船。
美国,当今世界唯一的超级大国,在无人船舶的研制上早已先发于人,其研制的无人艇船队,首先应用的就是在军事工业领域,并且取得重大成果[3]。早在20世纪60年代,在越南海域内就布置了“拖链式”遥控艇,用于战场的扫雷作业;1997年,NavTec公司研发出“Owl MK Ⅱ”号无人艇,拥有声呐扫描和海上侦察监视功能;2003年,美国水下作战中心研发出“斯巴达侦察兵”无人艇,不仅拥有着扫雷和侦察监视功能,还拥有着反潜和精准打击功能;2010年,通过升级改造的“水虎鱼”无人艇,更是拥有着一系列的伪装技术,从而实现“隐身”的功能;2014年,美国无人舰艇不仅拥有着保护本方舰艇的能力,还拥有能发起“蜂群战术”自主攻击的能力;2016年,美国下水最新型的“海上猎手”无人反潜船,如图1.1所示,其是世界上最大的无人驾驶船。
图1.1 美国“海上猎手”无人反潜船
以色列,虽然国土面积不大,但其在无人船舶领域的研究处于领先的地位,其无人船艇的研制成果更是硕果累累[4]。2003年,以色列航空防御系统公司和拉斐尔武器设计局联合研发出“保护者”无人艇,拥有着侦察监视功能,被以色列用于领土防御和反恐作战;2005年,以色列Elbit公司研发出“黄貂鱼”无人水面艇,其不仅具有海岸物标识别,电子侦察等功能,还具有体积小,隐身性好的特点;2013年,以色列研发出新型“保护者”无人艇,如图1.2所示,其各种性能不断提升,不仅具有强大的续航能力,还拥有着更强的海上航行稳定性。

图1.2 以色列“保护者”无人艇
如今,随着社会和科学信息技术的发展,除了美国和以色列之外,各国的无人船舶产业也正在兴起,日本为打造本国的智能航运生态系统实施无人船舶计划,新加坡在斥巨资打造港湾无人船,俄罗斯为探索北冰洋正在研发远洋无人船,英国在开发无人货运船,澳大利亚在计划研发推出无人散货船等等[5]。在无人船舶的领域,许多国家都在争相发力,力求尽快实现技术的突破,力争抢占市场的先机。
1.2.2 国内研究现状
在我国,无人船舶技术的研发起步较晚,关键技术与西方发达国家还有着较大的差距。相对较早的是新光集团于2008年研制出的“天象一号”无人气象探测船,其成功的为北京奥运会的青岛帆船比赛提供了气象保障服务。
在我国,目前对无人船舶研制技术相对先进的有云洲智能科技有限公司,武汉理工大学等高校,中船重工集团科研院所等等[6]。而云洲智能科技有限公司当属其中的佼佼者,其于2010年的珠海成立,在2013年便研发出全球首款水质监测无人船,如图1.3所示。2016年,为了公司的研发有测试应用条件,以更好地落实研究成果,在海上建立了相应的测试基地,保证了产品的适用性;2017年,开始启动无人智能货运船舶研制的相关工作,开启了我国无人船舶领域的又一新篇章,并在2018年实现世界上首次无人艇协同编队;2018年3月,为了更好地推动着无人船舶产业的发展,经珠海市政府批准,决定在珠海万山建立目前全球上最大的,功能最齐全的无人船舶海上测试场[7]。在无人船舶研制领域中,除了云洲智能科技有限公司之外,国家海洋局第一海洋研究所,自2009年以来也对无人船舶系统开展了研制工作。
如今,在国家的战略支持下,国内企业、科研院所和高等院校联合研发,形成强大的科研力量,正在助力我国无人船舶产业快速发展。

图1.3 云洲水质监测无人船
1.3 研究内容和论文结构
本文首先对无人船舶的路径规划及航行紧急避碰的相关理论知识进行深入学习研究,总结相关理论经验,并经过充分地分析考虑其在这方面存在的一些问题。在通过资料对比的基础上,首先对海域环境进行模拟,而后通过分析船舶操纵运动方程,实现对无人船舶动力学特性的数学建模,实现无人船舶运动状态改变;接着分析基于动态窗口的路径规划算法的相关特性,决定采用动态窗口算法并改进评价函数的紧急避障策略来实现无人船舶的路径规划与紧急避碰功能;最后,通过MATLAB R2019a平台,在静态障碍和动态障碍相结合的海域环境中实现无人船舶的路径规划和紧急避碰功能的仿真。
本文的相关结构安排如下所示:
第1章:绪论。主要介绍了在当前无人船舶路径规划与紧急避碰的研究背景和无人船舶技术在国内外的发展状况。
第2章:路径规划研究及环境建模。主要分析了路径规划技术在无人船舶领域的相关研究以及其不足之处,并对课题仿真环境进行建模。
第3章:无人船舶动力学特性建模。通过对船舶动力学特性进行分析,提出船舶动力学特性建模思想,建立船舶运动数学模型,从而模拟船舶的操纵运动。
第4章:基于动态窗口的路径规划算法。介绍动态窗口法的原理,总结其不足之处,对其进行改进,使其适应船舶的路径规划。
第5章:实验仿真与结果分析。对无人船舶路径规划系统流程分析,并通过对无人船舶路径规划与紧急避碰功能进行仿真,观察其实验结果,检查是否期望结果相符。
第6章:总结与展望。总结本次课题所做的相关研究内容,反思不足之处,和对未来工作的展望。
第2章 路径规划研究及环境建模
2.1 路径规划概述
路径规划和紧急避碰问题不仅是无人驾驶飞机和无人驾驶汽车研究的关键点,同时也是研究无人船舶技术的优先任务,其反映了无人船舶自动化、智能化的水平,同时它的准确精度与适用性直接决定着在无人船舶驾驶领域能力水平的高低。
通常来说,无人船舶航迹规划就是在有静态障碍物和动态障碍物的海域中,从起点位置到终点位置找到一条无障碍物的,能够安全行驶的路径,同时在行驶过程中,若遇到动态障碍物,如按固定轨迹航行的另一艘船舶等,能够在相遇碰撞前,可同步改变无人船舶的运动状态和路径,使无人船舶能够安全地避障。
无人船舶航迹规划可根据对所拥有的航行海域环境的知悉程度分为全局航迹规划和局部航迹规划[8]。全局航迹规划又称静态航迹规划,它需要提前掌握起点位置到终点位置间的所有海域环境信息,并根据所知的海域环境信息,规划出一条无障碍物的航行路径,但它不能实时感知环境的变化,一旦在航行路线内出现随机的动态障碍物,无人船舶本身就会很容易出现危险,甚至会被毁坏。局部航迹规划通常被叫做动态航迹规划,它不需要知悉所有的海域环境信息,只需要实时采集周围环境信息,然后确定静态障碍物和动态障碍物的信息,并根据这些信息规划出一条能避碰的最优航行路径。
2.2 船舶路径规划应用
路径规划算法通常可分为传统算法、智能仿生学算法以及其他一些新规则的路径规划算法。路径规划算法在智能机器人与无人驾驶汽车中的现实成功应用较多,而在无人船舶方面相对的现实成功应用较少。对于无人船舶进行航行路径规划的算法在现实中的成功应用,如表2.1所示。
表2.1 无人船舶路径规划优化比对
相关研究 | 路径优化 | 速度优化 |
Joo等人(2012) | A-star和Dijkstra算法 | 进化策略 |
Bang和Kwon(2014) | A-star算法 | 进化策略 |
Choi等人(2015) | A-star算法 | —— |
Park和Kim(2015) | A-star算法 | 几何规划 |
Kim等人(2016) | 混合A-star算法 | —— |
在2012年,Joo等人使用了“A-star”算法实现了无人船舶在固定速度状态下航行的最优路径,同时通过结合考虑船舶航行的天气条件,使用“Dijkstra”算法修改了原来的路径并调整了无人船舶航迹上的速度[9]。同样,在2014年,Bang和Kwon通过使用“A-star”算法实现了无人船舶在固定速度状态下航行的最优路径,不同的是,在结合考虑天气条件的情况时,他们是通过使用进化策略修改了原来的路径并且调整了无人船舶航迹上的速度。在2015年,Choi等人在针对北冰洋的船舶航线规划时,在考虑了天气状况,包括了流冰行为的不确定性即冰块随着时间不断的变化,提出了一个流冰模型,他们提出了一种使用“A-star”算法在时变天气条件下确定最优路径的方法,然而,他们没有对船舶的航行路径进行速度优化。同年,Park和Kim使用“A-star”算法找到船舶在固定速度状态下的最优路径,然后使用几何分析法调整船舶航迹上的速度。2016年,Kim等人使用混合“A-star”算法找到无需调整航速的最优路径。以上等人的研究,都是采用分离阶段实现的速度优化。对于以上的每个研究,使用了不同的优化方法,其共同点都在于,在第一阶段确定了最短路径,随后在第二阶段调整了航行路径上的速度。但比较大的缺点就是,在无人船舶路径规划中缺少同时考虑船舶航迹和航速的方法[10]。
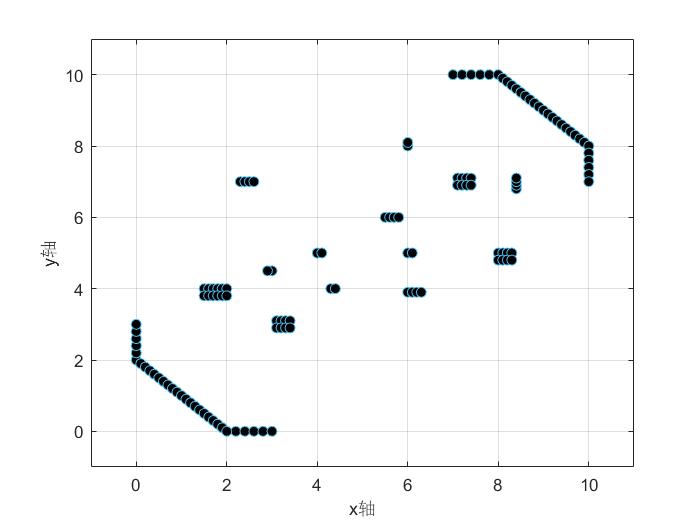
2.3 海域环境建模
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: