基于龙芯微处理器的自平衡小车设计毕业论文
2020-04-21 16:58:56
摘 要
电动车的平衡,也称为自平衡车,两轮平衡车。由于交通的一个新兴的手段,它在年轻人中很受欢迎。市场上目前有两轮电动平衡车和独轮电动平平衡车两种种类。保持平衡的主要原则是依靠内置的陀螺仪模块和加速度传感器模块来实现称为"动态稳定"(动态稳定)的状态。是用来进行短距离代步与休闲锻炼新型绿色交通工具。在理论方面的研究,作为一个重力系统,由于有地心引力的影响,自平衡小车是无法保持平衡的。它需要依靠对车轮与电机的合适参数调整来实现平衡,因此需要整体系统的灵敏度非常高,而且传感器的数据要进行滤波和分析之后才能作为控制数据,具有很高的学习与钻研的价值,可以了解到大量与PID算法与I²C协议有关的专业知识。本次设计中,我选用了I²C协议作为硬件通讯的协议,PID算法作为使小车平衡的核心原理,在芯片方面选择了国产芯片LS1C300B作为主芯片,MPU6050姿态检测模块来测量加速度与角速度数据来进行这次自平衡小车的设计,完成了硬件的搭建后我选用C语言来完成程序达到最后小车平衡的目的。经过程序的计算成功可以使小车可以成功的在静止的条件下完成平衡并且可以慢速前进。
关键词:龙芯ls1c;MPU6050姿态检测模块;PID算法
Design of Two-wheeled Self-balancing Car Based On LS1C300B
Abstract
Balancing of electric vehicles, also known as self-balancing vehicles, two-wheeled balancing vehicles. As a new means of transportation, it is very popular among young people. There are two kinds of electric balancing cars on the market, one-wheeled electric balancing car and two-wheeled electric balancing car. The main principle of maintaining balance is to rely on the built-in gyroscope module and acceleration sensor module to achieve a state called "dynamic stability" (dynamic stability). It is a new type of green transportation for short-distance walking and leisure exercise. In theoretical research, as a gravity system, due to the influence of gravity, self-balancing car can not maintain balance. It needs to adjust the appropriate parameters of wheels and motors to achieve balance, so the sensitivity of the whole system is very high, and the data of sensors need to be filtered and analyzed before they can be used as control data. It has high learning and research value, and can learn a lot of professional knowledge related to PID algorithm and IC protocol. In this design, I choose IC protocol as the protocol of hardware communication, PID algorithm as the core principle to make the car balance, in the chip aspect, I choose LS1C300B as the main chip, MPU6050 attitude detection module to measure acceleration and angular velocity data for the design of the self-balancing car. After completing the hardware construction, I choose C language to complete the program to achieve. Finally, the purpose of car balance. Successful calculation of the program enables the car to balance successfully under static conditions and to move slowly.
Keywords:LS1C;MPU6050Attitude Detection Module;PID algorithm
目录
第一章 绪论 1
1.1应用背景 1
1.2 研究意义 1
1.3章节安排 2
第二章 系统原理篇 3
2.1 I²C总线传输协议 3
2.1.1 I²C总线传输协议简介 3
2.1.2 I²C的物理层 3
2.1.3 I²C协议层 4
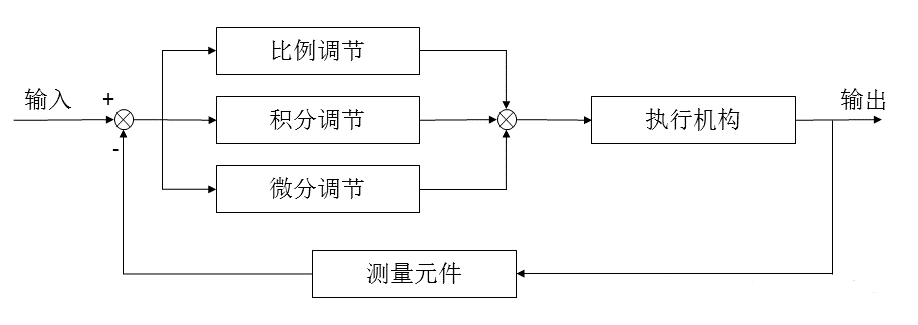
2.2 PID算法原理 6
2.2.1比例控制算法 7
2.2.2积分控制算法 8
2.2.3微分控制算法 8
2.2.4 PID算法控制器的原理 8
第三章 系统硬件设计 10
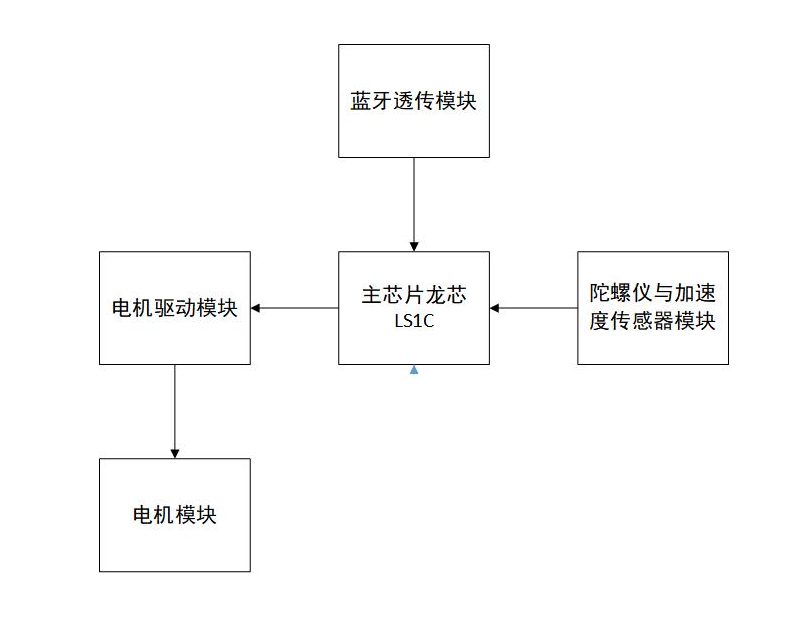
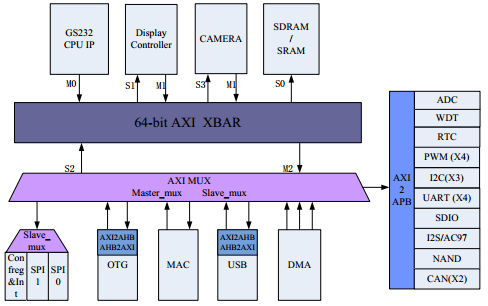
3.1硬件整体系统框图 10
3.1.1 电源模块 12
3.1.2主控制器 12
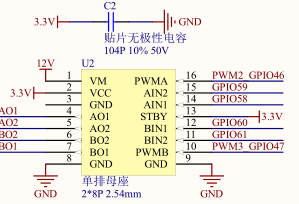
3.2.3 电机驱动模块 15
3.2.4姿态检测模块 15
3.2.5蓝牙模块 17
第四章 系统软件设计 18
4.1软件系统总体设计 18
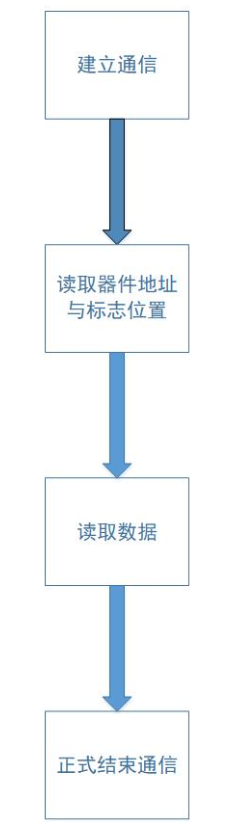
4.2软件系统总流程图 18
第五章 测试与调试 20
5.1蓝牙模块调试 20
5.2 MPU6050模块调节 20
5.3电机调试 20
5.4小车平衡调试 20
5.5问题与解决办法 21
第六章 论文总结 22
参考文献 1
附录 2
第一章 绪论
1.1应用背景
生活是向着智能化发展的,大型的汽车有着许多不便出行的场景与地形。两轮自平衡车的出现改变了这一场景。汽车尾气的大量排放给地球生态以及全球变暖带来了很不利的影响,而电动两轮自平衡车却可以在解决人们短途交通的需求的同时将这方面的影响降到最低。而且能源方面,电力或许会在不久的未来作为清洁能源在许多方面代替石油,电力平衡车的研发也是为了未来的能源革命进行未雨绸缪。以学生为主要推广,尽量将两轮平衡车的优点推广出去,有利于促进智能代步的普及。
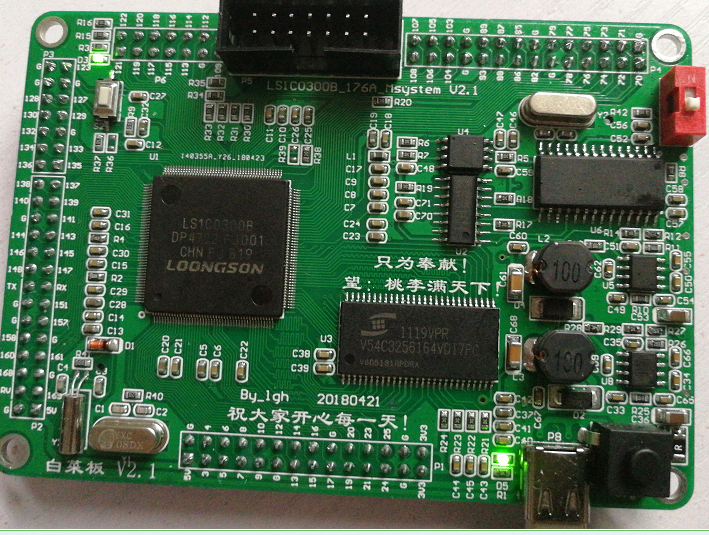
相关图片展示: