基于Kinect的待拆卸零部件识别与定位毕业论文
2020-04-13 11:46:24
摘 要
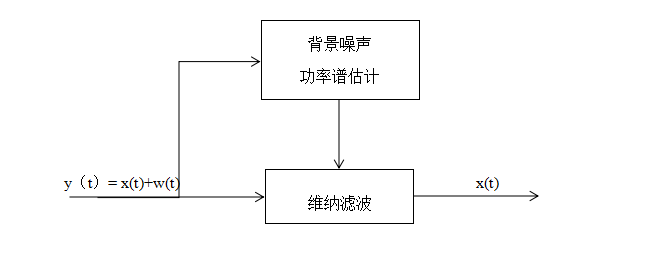
本文研究了零件拆卸过程中的识别和定位应用技术。对国内外研究进行了回顾与展望,分析了零部件拆卸的意义,并详细论述了零部件识别与定位原理。本文主要研究基于Kinect的待拆卸零件的识别与定位,主要包括图像采集,图像预处理、模板匹配以及目标物体识别与定位。 针对Kinect传感器采集目标深度图像与彩色图像大小不一致的问题,提出一种基于仿射变换的图像校正方法,利用彩色图像和深度图像相对应的仿射变换矩阵对彩色图像进行校正处理。使用模板匹配方法来识别经校正的典型零部件的彩色图像,然后使用深度图像来定位所识别的典型零部件。
研究结果表明,本文结合零部件在彩色图像中的详细信息和零部件在深度图像中的深度信息,可以实现零部件的识别和定位。所得结果对自动化拆卸行业提高出品质量、降低生产成本、提高经济效益具有十分积极的意义。
关键词:零部件拆卸;Kinect 传感器;深度图像;彩色图像;
Abstract
This paper studies the identification and positioning application techniques in the disassembly process of parts. The domestic and foreign researches are reviewed and prospected. The significance of component disassembly is analyzed, and the principle of component identification and positioning is discussed in detail.This article mainly studies the identification and positioning of parts to be disassembled based on Kinect, including image acquisition, image preprocessing, template matching, and target object identification and positioning.Aiming at the inconsistency between the depth image and the color image size of the target image acquired by the Kinect sensor, an image correction method based on affine transformation is proposed. The color image and the depth image correspond to the affine transformation matrix to correct the color image. The template matching method is used to identify the typical components of the corrected color image, and then the depth image is used to locate the identified typical components.
The research results show that this article can realize the identification and positioning of components by combining the detailed information of components in color images and the depth information of components in depth images. The results obtained have a very positive significance for the automated dismantling industry to improve product quality, reduce production costs, and increase economic efficiency.
Key Words:component disassembly; Kinect sensor; depth image; color image;
目 录
第1章 绪论 1
1.1 研究目的及意义 2
1.2 国内外研究现状 2
1.3 主要研究及章节安排 3
1.3.1 主要研究内容 3
1.3.2 章节安排 4
第2章 图像采集 6
2.1 Kinect相机 6
2.1.1 Kinect硬件简介 6
2.1.2 Kinect特点 7
2.1.3 Kinect应用 7
2.2 Matlab软件平台 8
2.3 图像采集 8
2.3.1 目标采集 8
2.3.2 彩色图像与深度图像 9
第3章 图像预处理与矫正 11
3.1 图像预处理 11
3.1.1 图像增强 11
3.1.2 图像复原 13
3.1.3 图像二值化 15
3.1.4 图像边缘获取 18
3.2 图像校正 20
第4章 目标识别与定位 23
4.1 目标识别 23
4.2 目标定位 25
4.3 实验 26
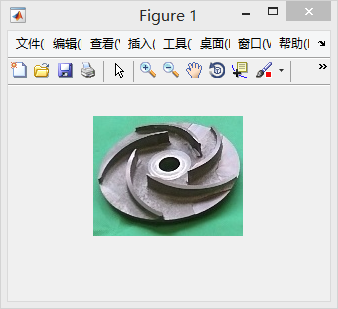
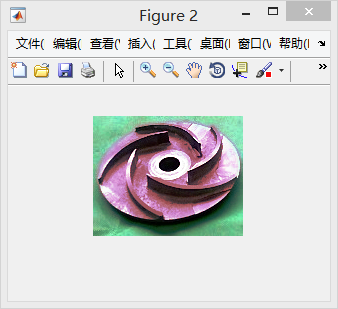
4.3.1彩色图像校正 26
4.3.2 零部件识别 27
4.3.3 零部件定位 28
第5章 总结与展望 30
5.1总结 30
5.2展望 30
参考文献 32
致 谢 33
第1章 绪论
1.1 研究目的及意义
目前,废旧机械中的零部件作为废旧旧机械产品的一部分,随着机械产品的整体报废也一同报废了,而其中的大部分零部件仍然具有很高的利用价值。 与此同时,再制造技术使得大量废旧零部件的回收再利用成为可能。研究如何有效地自动识别废旧旧机械产品的零件,是再制造系统的重要组成部分。
拆卸是提高废旧机械利用价值和减少对环境影响的关键步骤。 但是,由于回收的废旧旧机械在质量上和数量上的不确定性,大部分废旧机械仍需要手动对其进行识别和拆卸[1]。 早期识别废旧机器中的零部件主要基于人工识别。 但随着工业化的不断发展,人工检测和识别已不能满足质量和数量上的要求。 因此,国内外学者进行了大量的研究,其中,使用机器视觉识别和定位废旧的机械零部件来完成拆卸是这其中非常重要的过程[2]。
机器视觉是使用机器而不是人的眼睛来进行对目标的判断和测量。机器视觉系统是指通过机器视觉产品(即图像采集设备,CMOS和CCD)将捕获的物体转换为所需的图像信号[3],并将它们转移到专用图像处理系统,该系统根据像素分布,亮度,颜色,和其他信息,生成相应的数字信号。图像系统对这些数字信号执行相应的操作以提取目标的特征,然后基于辨别结果来实现对现场设备操控。
在一些不适合手动操作的危险工作或人工视觉达不到目标要求的条件里,它通常作为人工视觉的替代品。另外,在规模较大的工业化生产的过程里,使用人工视觉对产品质量进行检测效率低下,精度达不到要求。机器视觉对目标进行检测对生产效率的提高和生产自动化进一步发展大有帮助。而且,机器视觉方便信息进行集合,是零部件拆卸过程中集成制造的基础技术。
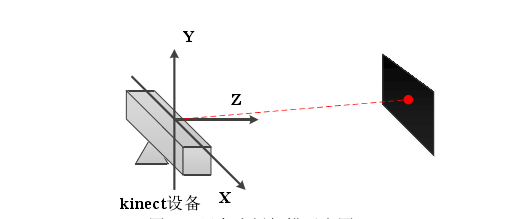
在机器视觉中,普通相机的零部件识别和定位系统容易受到不同照明条件和复杂环境的影响。 大多数的图像摄取设备制造起来繁琐,并且价格昂贵。 微软Kinect相机由于其简单,便宜,方便,因而被广泛用于三维重建,目标跟踪和手势识别。 由于Kinect不是双目摄像机,不需要参数标定即可直接获取深度图像信息,提高了定位速度和准确性,并大大降低了成本。
1.2 国内外研究现状
国内学者对废旧机械产品的拆解和回收利用自2000年起开展研究,并取得了相关研究成果。由于环境保护的需要和资源日益紧张,学者越来越重视废旧机械产品的零部件拆卸研究,这已经成为一个非常重要的研究领域。 根据已发表的论文和相关研究,国内废旧机械产品的拆解相关研究基本上集中在拆解模型和规划,物理拆卸方案和技术,以及生产线的自动拆卸。 国外已经开发了几种全自动拆卸系统来实现废旧机器产品的拆卸。 这些系统可以完成指定型号废旧机械的自动拆卸的目的,从而节约大量的人力资源。
机器视觉是近年来随着计算机技术,传感器技术和人工智能的发展而出现的一个新兴研究领域[4]。它具有广阔的应用前景,特别是在军事和民用领域。在工业领域,机器视觉主要用于组件识别,组件定位和方位检测。正确识别组件类型并根据获取的视觉信息确定组件的位置是利用机器视觉完成零部件拆卸的关键。
近年来,机器视觉被广泛应用在人脸识别、发票号码识别、医学图像检测、军事、农作物质量检测等领域,主要得益于它的较宽的非接触式的光谱响应范围、测量、定位和缺陷检测等方面特有优势。在自动拆卸中,机器视觉是自动获取组件的特征信息和特征参数的一种可行的技术。对于一些高精度,高负载的重复性和智能化任务,如微妙的缺陷检测和组件测量,人眼难以实现连续稳定的完成,但检测任务可以由机器视觉高效率和高质量地实现。
国内外主要通过基于特征的图像识别来完成基于机器视觉的机械零部件的识别。 主要区别在于所使用的识别特征是不同的,例如使用零件几何特征或轮廓曲线特征,使用不变矩特征以及使用信息熵的。 所构建的识别模型的结构不一样,所采用的识别方法也不一样。
机器视觉系统主要结合了光学,计算机技术和电子技术。 机器视觉系统通过图像摄取装置获取目标图像,然后使用计算机对所获取图像进行预处理[5]。 在预处理的图像被分割之后,提取其中有用的信息并用于做出相应的判断。 最后,将有用的信息反馈回控制设备。 机器视觉系统通常包括:光源,图像采集设备,图像处理软件平台,图像处理硬件平台和通信模块。 机器视觉系统根据不同的功能可分为图像采集,图像显示,图像分析和图像处理。 其核心部分是图像的处理和分析。
本文提供了一个基于Kinect的待拆卸零件识别和定位方法,从而解决了在现有组件识别中使用现有的图像识别方法,难以直接确定组件的空间位置的问题。 该设备提供目标的深度图像和彩色图像,并确定零部件识别过程中的零部件空间位置。
1.3 主要研究及章节安排
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: