智能焊接用实芯焊丝CO2焊焊缝成形规律研究毕业论文
2020-02-19 15:45:07
摘 要
在智能焊接日益发展的今天,对于焊缝成形规律的研究刻不容缓。但是焊缝成形是一个复杂的过程,每一个焊接工艺参数几乎都会对焊缝成形有不同程度的影响,而本文的研究目标就是研究实芯焊丝CO2保护焊在不同焊接工艺参数情况下的焊缝成形规律,为实芯焊丝CO2智能焊接提供基础性焊接参数支持。
本课题研究采用三因素五水平正交实验设计方法探究焊缝成形规律,以焊接电压、焊接速度、送丝速度作为输入参数,以焊缝的熔宽、余高、熔深作为输出响应。设置合理的输入焊接工艺参数,并实验得到正交实验结果。借助Minitab软件对正交实验结果进行分析,探究熔宽、余高、熔深与这三个焊接工艺参数的相关性,并建立了熔宽、余高、熔深关于这三个焊接工艺参数的多元回归方程,可以一定程度上预测在一定焊接工艺条件下的焊缝尺寸。
关键词:焊接工艺参数;焊缝成形;正交设计;回归分析
Abstract
Today, with the development of smart welding, the research on the law of weld formation is an urgent task. However, weld forming is a complicated process, and each welding process parameter will have different degrees of influence on weld formation. The research goal of this paper is to study the weld of solid wire CO2 welding under different welding process parameters. Forming law, providing basic welding parameter support for solid wire CO2 intelligent welding.
In this paper, the three-factor and five-level orthogonal experimental design method is used to explore the welding forming law. The welding voltage, welding speed and wire feeding speed are taken as input parameters, and the weld width, residual height and penetration depth are used as output responses. Set reasonable input welding process parameters and experimentally obtain orthogonal experimental results. The results of orthogonal experiment were analyzed by Minitab software, and the correlation between melting width, residual height and penetration depth and the three welding process parameters were explored, and the melting width, residual height and penetration depth were established. The multiple regression equation can predict the weld size under certain welding process conditions to some extent.
Key Words :Welding process parameters; formation of weld; orthogonal design; regression analysis
目录
第1章 绪论 1
1.1研究背景 1
1.1.1 CO2焊特点及其应用 1
1.1.2 智能焊接的发展及现状 2
1.2研究工作及目的意义 3
1.2.1 本文研究的主要工作及目的 3
1.2.2 社会、健康、安全、成本以及环境等因素下的研究意义 3
第2章 智能焊接用实芯焊丝CO2焊焊缝成形规律研究方案设计 5
2.1研究实验设计 5
2.1.1实芯焊丝CO2焊的方案设计 5
2.1.2三因素五水平正交实验设计 6
2.1.3单因素变量实验方法 8
2.2 焊接工艺参数的设计 8
第3章 实芯焊丝CO2焊焊接工艺实验 12
3.1实芯焊丝CO2焊实验的前期准备 12
3.1.1焊接材料及设备器材的选用 12
3.1.2前期准备工作 12
3.2 实芯焊丝CO2焊焊接实验及结果 13
第4章 实芯焊丝CO2焊焊缝实验结果分析 19
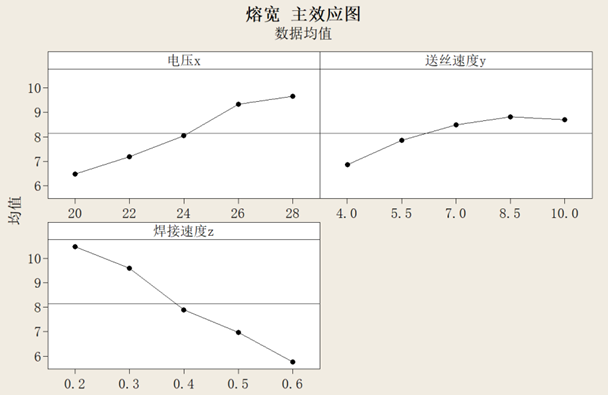
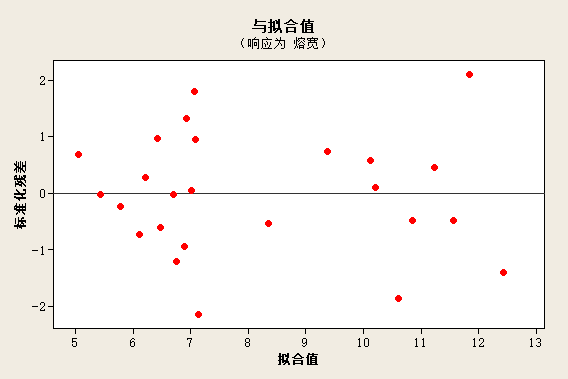
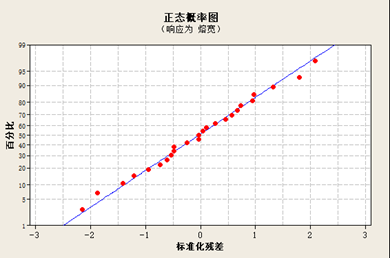
4.1熔宽与焊接工艺参数的相关性分析 19
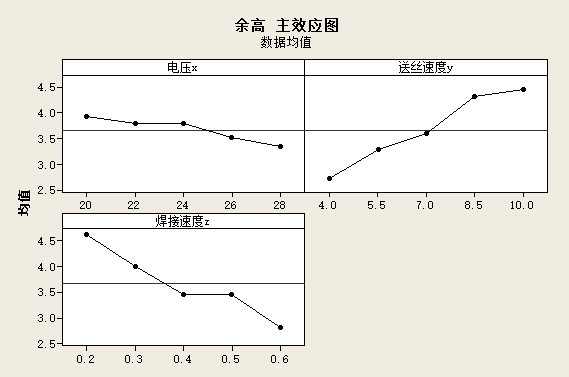
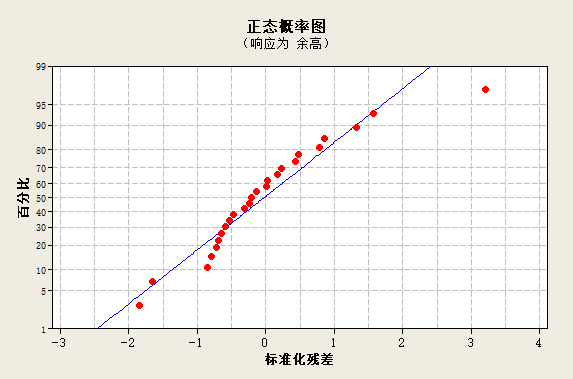
4.2余高与焊接工艺参数的相关性分析 21
4.3熔深与焊接工艺参数的相关性分析 24
第5章 结论和展望 28
5.1结论 28
5.2未来展望 28
参考文献 29
致谢 30
第1章 绪论
1.1研究背景
1.1.1 CO2焊特点及其应用
随着进入21世纪,我国的经济建设进入迅猛发展的时期,焊接技术在我国国民经济的几乎每个领域都得到较为广泛的应用,是不可缺少的先进技术之一。当下主流的焊接方法有熔焊、钎焊、压焊[1]。相对于后两种焊接方式,在对材料进行熔焊时往往需要在工作环境下输入保护气体。结合安全性、成本等多方面考虑,保护气体必须满足高生产效率、低生产成本、易获取等要求,而CO2气体作为常见气体恰好符合这些要求,因此CO2也作为保护气体广泛应用于各类熔焊操作中。在焊接过程中,CO2气体保护焊也存在一定问题,首先会产生较大的飞溅,焊接熔池稳定性受影响,影响生产效率及焊接质量;其次,会对人体健康产生一定影响,这主要是由焊接过程中产生的烟尘造成的。但CO2气体保护焊的优势同样也很明显:在CO2气体的保护下,焊接材料变形小,焊接成品在低温下不易开裂且相同条件下生锈的概率更低,而且CO2气体保护焊能够应用于各种焊接位置[2]。可以看到,尽管CO2气体保护焊的弊端很明显,但其优势也是其他方式无法比拟的。因此,为了帮助CO2气体保护焊能够得到更广泛的应用,使其实现更大的经济效益,各国实验室都加大了研发的力度,更大程度的开发CO2气体保护焊,CO2气体保护焊也因此得到了长足的发展。综合以上现实情况考虑,现如今CO2焊接已经逐渐从人工手工焊接向半自动化焊转变,可以预见,随着科技的进一步发展,全自动焊接机器人技术也将逐渐成熟,最终完全取代半自动化焊。
根据焊丝的成分差异,CO2气体保护焊又可以进一步细分为实芯焊丝CO2焊和药芯焊丝CO2焊两种[3]。相较于药芯焊丝,由于实芯焊丝未能改变电弧气氛的性质,因此实芯焊丝CO2焊产生的飞溅较大,飞溅颗粒也相应较粗难以清除。除此之外,焊缝不够美观也是实芯焊丝的缺点之一,而药芯焊丝因熔池表面覆盖有熔渣,所以焊缝成形类似焊条电弧焊,比用纯CO2时美观。而且由于熔池受到保护气体(CO2)以及熔渣的双重保护,所以药芯焊丝有较强的抗气孔能力。但药芯焊丝也有其相应的缺点,首先药芯焊丝价格高于实芯焊丝,实芯焊丝的价格仅为药芯焊丝的3/5;其次,药芯焊丝需要清渣,相比之下实芯焊丝更适合于打底层焊缝和多层多道焊;第三,相对于实芯焊丝,药芯焊丝的抗裂性能较差。综上所述,实芯焊丝应该得到更加广泛地推广,实芯焊丝CO2焊的用量应占有一定份额[4]。这是因为随着时代的发展,智能焊接必将成为行业主流,但在智能焊接中实芯焊丝的应用更加的广泛——全自动焊接设备(如焊接机器人,焊接机械手)几乎都是使用实芯焊丝,药芯焊丝焊完后焊缝表面会有药皮,清渣工作必不可少,这对自动焊来说是很不方便的,特别是多层多道焊就更麻烦,不清渣就进行下一道焊接可能会产生夹渣等焊接缺陷,而实芯丝则不存在清渣的问题。
1.1.2 智能焊接的发展及现状
当前科研环境下,材料、自动化控制等多学科交叉使得传统的手工焊接工艺逐步转变为现代的科学、智能生产,我们有理由相信随着科学技术不断发展,未来焊接行业必将走向自动化、智能化。在工艺生产智能化的大浪潮之下,当下智能化机器人的研究方向更多的是拟人化,焊接机器人智能化也不例外。目前智能焊接机器人的研究热点是以模拟焊工为主,具体有三个方面的研究:第一模拟焊工在焊接过程中对于焊缝信息采集的能力,即对于传感器的研究,使焊接机器人可以精确掌握焊接过程中的动态信息;第二使其拥有媲美资深焊工的焊接经验,基于收集到的焊接过程中焊接信息能够快速建立焊缝成形相关的对应关系,为保证焊接质量而匹配合适的焊接输入参数;第三实现自动控制焊接输入参数,模仿焊工操作,使机器人自主完成焊接过程且精度堪比专业焊工[5]。藉由智能焊接的研究方向,焊接智能化的发展主要有两个大前提,硬件设备的研制和焊接数据库的优化。硬件设备主要是针对传感器,优化传感器使获得的实时焊接动态信息能更加及时且准确。当然由于焊接过程中受到各种各样的参数影响,融化的焊丝及熔池变化莫测,焊接动态数据又多又复杂,又不断变化[6],因此如何发展传感器以快速准确地获取信息是智能化焊接必须要考虑的问题。焊接数据库的优化即通过提取焊工丰富的经验以建立数学模型,能够在智能焊接时快速推算出合理的焊接输入参数,优化关键的焊接输入参数,以保证最终的焊缝成形质量。
在硬件设备方面,长期以来欧美国家大力推广焊接智能化,研究机器人焊接中使用传感器来控制焊接质量,采用焊缝跟踪技术,通过传感器反馈实时监控焊接过程参数,实现系统的全自动化[7]。我国很多机器人研究公司已经开发出具有接近焊工感知能力的焊接机器人[8]。在焊接数据库的优化方面,欧美国家先于我国开始进行焊接数据库的研究,其中数据库的焊接工艺参数有很多且范围较广,包括常见的焊接方法、焊接电压电流、焊接材料、适用焊接环境等各类型的焊接数据库,应有尽有。现如今主要的数据库包括英国焊接研究所的QMWELD(制造信息管理)和XWELD(焊接工艺管理)、美国焊接研究所的Weldmanger(焊接数据库)等。我国关于焊接数据库的研究起步较晚,但是发展地很快,其中哈工大与哈尔滨锅炉厂共同研发的焊接数据库相对比较完善,包含包括材料力学性能分析、焊接CCT图、焊接工艺评定结果等[9]。在互联网普及的现代,大量企业在生产过程中投入使用国内外的各类型焊接数据库,在实际应用中以Intrant 的Client/Server模式和基于Internet的Beowser/Server模式的数据库为主[10]。即使现在国内外已经有了如此丰富的焊接数据库,但是CO2气体保护焊智能化面临一个问题,在面对不同规格,不同形式的焊接接头时,如何选择焊接参数。无论是人工输入,还是机器人内部数据库,都是采用现有数据库。可无论是大学教材,还是焊接实用手册,所提供的参数选择,都是在很大范围内变动。相同规格的焊丝,选用的焊接工艺参数(电流电压等)波动范围极大。但实际上,范围内的参数并不是都符合实际场合。面对不同的板厚,不同的坡口形式,以及不同焊缝,如何选用准确的参数数据,需要依赖更准确庞大的数据库。所以需要进一步的数据记录,包括焊接后的焊缝余高、熔深,焊缝宽度等数据,并观察焊缝成型与焊接工艺参数之间的相关性。进一步建立精准实用的实芯焊丝CO2气体保护焊参数库,为实芯焊丝CO2智能焊接提供基础性焊接参数支持。
1.2研究工作及目的意义
1.2.1 本文研究的主要工作及目的
本论文针对应用于智能焊接用实芯焊丝CO2焊焊缝成形规律的研究。研究的主要内容包括以下几个方面:运用实验室现有设备进行半自动实芯焊丝CO2保护焊,焊接方式为表面堆焊;进行多次实验,制备足够的焊缝试样,收集焊缝的相关数据信息,研究实芯焊丝CO2保护焊在不同输入参数(电流,电压,焊接速度,送丝速度)情况下的焊缝成形规律,即测量焊缝的熔深、余高以及熔宽并分析它们与各个参数之间的关系,选出在质量达标的状况下输入参数及成形规律;进行数据分析,建立精确的对应关系。
1.2.2 社会、健康、安全、成本以及环境等因素下的研究意义
当前经济背景及技术环境下,许多焊工在实际作业过程中,并不考虑焊接工艺,而是在自身焊接水平的基础之上,追求工资最大化。由于焊接操作的不合规,导致焊机性能受到影响,焊接成品的质量也大打折扣[11]。虽然传统焊接机器人已经很普及,但当今传统的焊接机器人主要是基于流水线作业能够做重复机械的焊接动作,不能像焊工一样根据实时的焊接情况做出改变[12]。在工业4.0这一时代背景下,为保障焊接产品的可靠,同时提高企业生产效率且保证焊接质量,智能焊接必须尽早普及[13]。由于实芯焊丝在智能焊接中有着举足轻重的地位,整合实芯焊丝成形规律的研究,有助于焊接数据库的完善,提供可靠的实验数据,可以进一步推进焊接智能化的进程,使机器人焊接逐渐取代手工焊接,将焊接工人从高强度、极其恶劣的工作环境中解放出来,从而在安全和健康方面保护焊接工人。随着焊接数据库的建立及完善,焊缝的质量进一步提升,焊接过程的烟尘排放也将大大降低,这将大大降低焊接生产中的废品率,降低生产成本的同时,也助于环境的保护。
第2章 智能焊接用实芯焊丝CO2焊焊缝成形规律研究方案设计
2.1研究实验设计
2.1.1实芯焊丝CO2焊的方案设计
为了完成用智能焊接用实芯焊丝CO2焊焊缝成形规律研究,最关键的就是需要得到智能焊接用实芯焊丝CO2焊焊缝,或者模拟智能焊接机器人焊接动作焊接而来的焊缝。因此,需要选择合适的焊接方式以得到适合的焊缝以进行焊缝成形规律的研究。现代工业一般采用智能焊接机器人取代焊工的手工操作以实现智能化焊接,而目前智能化焊接机器人并没有在我国实现真正的普及,我国智能焊接机器人产业大而不强,焊接机器人密度远小于韩国、日本、德国、美国[14],很多高校的实验室内甚至都没有比较传统的焊接机器人。考虑到焊接机器人成本造价问题,在实验室中使用智能焊接机器人完成焊缝试样的制备是不切实际的,因此本研究采用模拟智能焊接机器人焊接动作完成焊缝的制备。
如何能够很好地运用实验室的设备模拟智能焊接机器人的焊接动作呢?首先就必须要对智能焊接机器人有一定的了解。目前我国比较常见焊接机器人是为了生产线操作及制造的而生产研发出来的,主要是做一些重复的人工焊接动作,目的是降低人工操作的不规范性,大幅度提高产品的质量和精度,实现安全的标准化生产。目前,焊接机器人智能化的发展还将融入仿生学的相关知识,在工业 4. 0 时代,要求焊接机器人拥有自主学习能力,能够适应各种各样的焊接焊接参数及焊接环境,能够自主感知和适应周围的环境,像经验丰富的焊工能够自主调节焊枪位置及焊接工艺参数,以实现小批量的焊接工作。总而言之,智能焊接机器人的焊接动作可以使用手工焊接来替代,手工用CO2焊机的焊枪也可以直接用于模拟智能机器人CO2焊的焊枪。但是这次研究中焊接速度是需要分析的焊接工艺参数,即使是经验丰富的焊工,也无法保证焊接时焊接速度保持不变,也无法始终保持匀速直线,如果使用纯手工焊接制备焊缝试样,就会产生较大的实验误差。综合实验室条件以及实验所设立的焊接输入参数的情况,采用半自动化CO2焊的形式模拟智能焊接,焊接方法为在平板上堆焊,以制备所需要的焊缝。其中,实现半自动焊接的方式为将焊枪竖立固定在磁力自走小车(小车通过磁力固定在与焊接工作台垂直的铁壁,可以实现直线匀速运动)上,焊接时,在小车上输入运动速度(单位为mm/min)及使用开关控制运动方向,人工手动按CO2焊枪上的按钮实现焊接过程。通过这种形式可以较好地模拟智能焊接机器人的焊接过程,也可以得到符合条件的焊缝试样,焊接操作过程见图2.1。
 图2.1 半自动CO2 焊焊接装置
图2.1 半自动CO2 焊焊接装置
2.1.2三因素五水平正交实验设计
由于本文需要研究的是智能焊接用实芯焊丝CO2焊焊缝成形规律研究,完成该需要海量的实验数据,在实验过程中焊接规范参数有焊接电压、焊接电流、焊丝干伸长度,保护气体流量和焊接速度。根据预期的研究目标与研究方向,焊接电压、焊接电流、焊接速度为变量,而焊丝干伸长度,保护气体流量为定量。在进行实验过程中,如果只是使用简单的控制变量法,有三个变量参数的情况下需要的进行焊接的次数就非常多,而且试验并未考虑输入的三个因素之间的相关性。在焊接过程中,焊接输入参数之间是息息相关的,因此如果采用简单的控制变量法研究成形规律,必然将产生系统性的错误,很多数据并不具备代表性,所以采用控制变量法是不切实际的,因此引入一种更加科学合理的实验方法——正交实验法。
正交实验法是一种简单高效的研究多因素多水平的设计方法,正交实验的方式为在全面实验中排除掉误差比较大的点,选择具有代表性的点来进行实验。这样避免了实验结果偏差较大缺乏代表性的情况的出现,这样有效减少了实验误差,也减少实验的次数,对于研究而言更加高效快捷,也更加合理,降低时间成本和实验器材的损耗。主要选用代表性点的方式为以正交性挑选出“均匀分散,齐整可比”的一系列点。实验方法是用固定的一套表,设定多因素多水平的参数进行实验研究,并分析统计结果[15]。因此可以设置合适焊接规范参数的设计,即一定范围的电流(送丝速度)、电压、焊接速度,有规律的取值变化,高效地得到这三个因素对于焊缝成型规律的影响。为了更直观地观察焊缝成形参数的变化,本次研究正交实验采用五水平。根据参数范围,本研究采用采用五水平三因素正交实验,一共25组实验,减少实验次数,提升研究效率,节约实验材料,降低时间成本。三因素五水平正交实验表见表2.1。
表2.1 三因素五水平正交实验表
实验序号 | 因素1 | 因素2 | 因素3 |
1 | 1 | 1 | 1 |
2 | 1 | 2 | 2 |
3 | 1 | 3 | 3 |
4 | 1 | 4 | 4 |
5 | 1 | 5 | 5 |
6 | 2 | 1 | 2 |
7 | 2 | 2 | 3 |
8 | 2 | 3 | 4 |
9 | 2 | 4 | 5 |
10 | 2 | 5 | 1 |
11 | 3 | 1 | 3 |
12 | 3 | 2 | 4 |
13 | 3 | 3 | 5 |
14 | 3 | 4 | 1 |
15 | 3 | 5 | 2 |
16 | 4 | 1 | 4 |
17 | 4 | 2 | 5 |
18 | 4 | 3 | 1 |
19 | 4 | 4 | 2 |
20 | 4 | 5 | 3 |
21 | 5 | 1 | 5 |
22 | 5 | 2 | 1 |
23 | 5 | 3 | 2 |
24 | 5 | 4 | 3 |
25 | 5 | 5 | 4 |
2.1.3单因素变量实验方法
初步确定实验方案为五水平三因素正交实验,初步分析实验数据可以得到焊缝成形与电流(送丝速度)、电压、焊接速度这三个因素之间的相关性,但是毕竟采用这种方式实验的次数相对较少,有可能因为各种因素造成的数据误差导致实验结果与理论想违背。为了避免出现这种情况,可以在完成正交试验之后,针对偏差较大的焊接工艺参数做单因素变量实验,可以针对这一变量做追加实验,进一步分析,完善实验数据,使实验更加严谨,同时还避免出现实次数过多的情况出现,能更直观地看出这单一因素对于焊缝成形的影响。
2.2 焊接工艺参数的设计
确定研究的实验方法为五水平三因素正交实验以及追加单因素变量实验,则需要确定实验过程中输入的三因素(焊接工艺参数)的取值范围与歩值,以及实验过程中保持不变的焊接参数。本次研究采用的实验室提供的焊丝,焊丝H08MnSiA,直径为1.2mm。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: