电动方程式赛车控制器开发毕业论文
2020-02-18 10:39:30
摘 要
为了适应中国纯电动车的发展趋势,中国汽车工程学会2015年在上海国际赛车场举办了第一届中国大学生电动方程式汽车大赛(FSEC),作为大学生科技创新比赛中最重要的一个组成部分,它吸引了无数大学生积极参与到比赛当中。整车控制技术作为电动方程式赛车的关键技术之一,它决定了方程式赛车性能的好坏,因此研制出性能优良、抗干扰性能优越的整车控制器具有非常重要的意义。本文依托于“某电动方程式赛车”进行整车控制器开发,使用Altium Designer软件对整车控制器硬件进行设计;对整车控制策略进行分析,采用CodeWarrior IDE软件对整车控制程序进行编写,实现赛车制制动能量回收、牵引力控制、故障检测和处理等功能。经过实车测试,结果表明,所设计的整车控制器具有快速响应性、抗电磁干扰的优良性能,满足赛车的使用要求。
关键词: 电动方程式赛车;控制器设计;牵引力控制
Abstract
In order to adapt to the development trend of pure electric vehicles in China, the China Automotive Engineering Society held the first China University Student Electric Formula Car Competition (FSEC) at the Shanghai International Circuit in 2015, as the most important component of the university students' science and technology innovation competition. Numerous college students have actively participated in the competition. As one of the key technologies of the electric formula racing car, the vehicle control technology determines the performance of the formula car. Therefore, it is very important to develop a vehicle controller with excellent performance and excellent anti-interference performance. This paper relies on "an electric formula racing car" for vehicle controller development, using Altium Designer software to design the vehicle controller hardware; analyzing the vehicle control strategy, using CodeWarrior IDE software to write the vehicle control program to achieve Racing braking energy recovery, traction control, fault detection and processing. After the actual vehicle test, the results show that the designed vehicle controller has excellent performance of fast response and anti-electromagnetic interference, and meets the requirements of the car.
Key words: electric formula racing car, controller design, Traction control
目录
摘 要 I
Abstract II
第 1 章 绪论 1
1.1论文目的及意义 1
1.2 整车控制器的研究现状 2
1.2.1 整车控制器国外研究现状 2
1.2.2 整车控制器国内研究现状 3
1.3 研究内容和技术路线 4
第2章 电动方程式赛车整车控制器硬件设计 5
2.1 主芯片的选型 5
2.2 最小系统模块设计 7
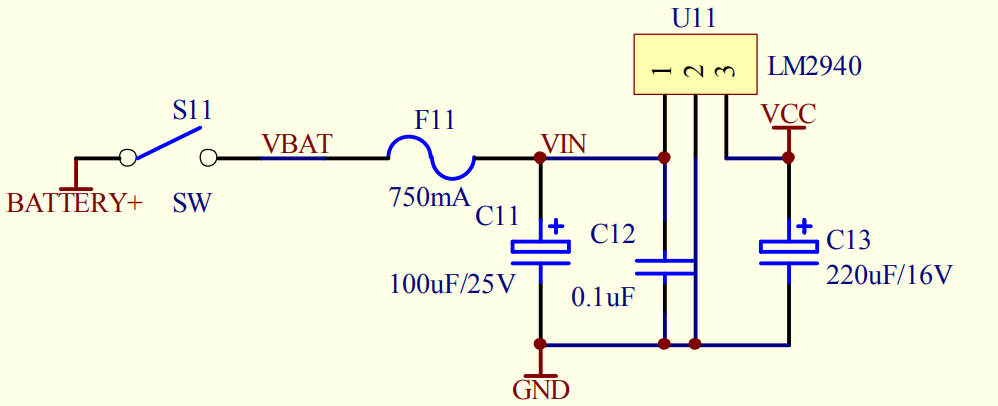
2.2.1 电源模块设计 7
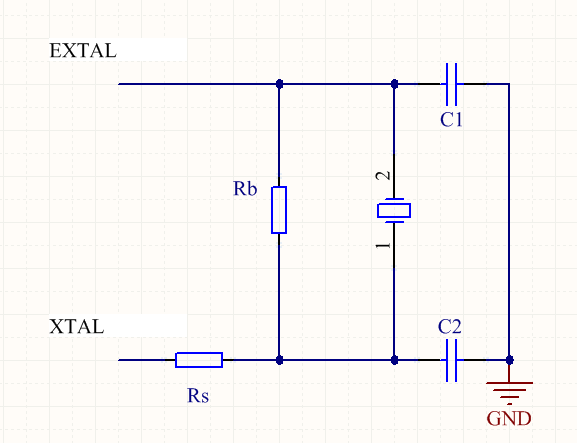
2.2.2时钟电路设计 8
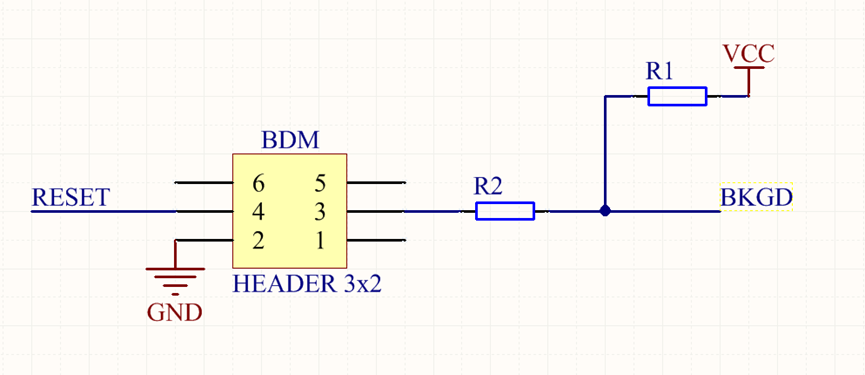
2.2.3 BDM烧写电路 9
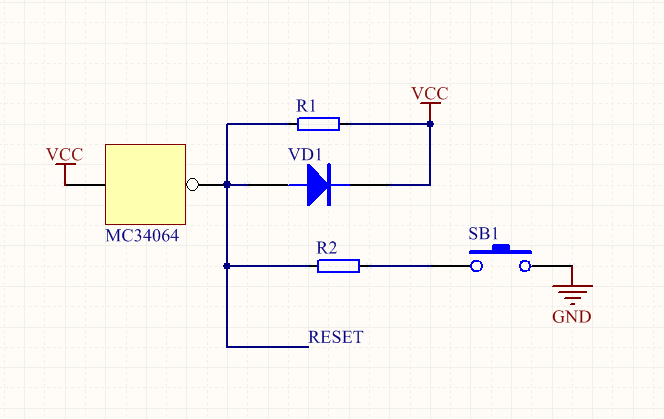
2.2.4 复位电路设计 9
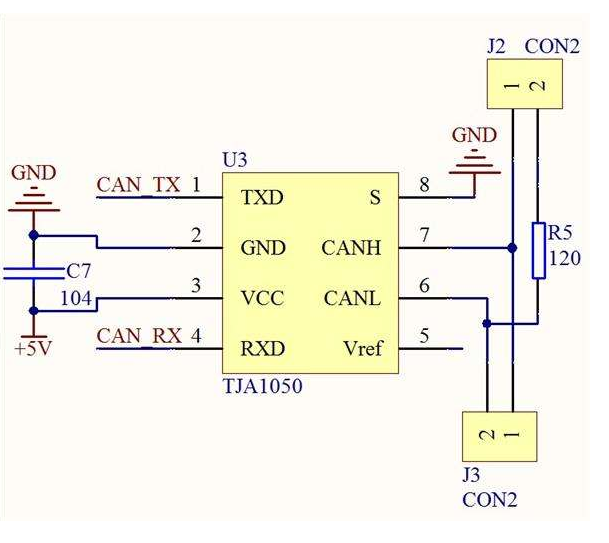
2.3 CAN 通信模块设计 10
2.4 输入信号模块电路 11
2.5 输出信号模块电路 12
2.6 硬件测试 12
2.7 本章小结 14
第3章 整车控制器的软件设计 16
3.1 软件设计总体介绍 16
3.2 整车上下电逻辑设计 16
3.2.1上电控制策略 16
3.2.2放电控制策略 18
3.3传感器信号处理 19
3.4输出转矩控制策略 20
3.5 整车代码编写 23
3.6 本章小结 24
第4章 故障诊断 25
4.1故障检测 25
4.2故障处理机制 25
4.3本章小结 27
第5章 总结与展望 28
5.1总结 28
5.2展望 28
参考文献 29
致谢 30
附录A 31
第 1 章 绪论
1.1论文目的及意义
中国大学生方程式汽车大赛的规则是由大高校学生自主设计并制造出一辆方程式赛车去参加比赛。2015年11月在上海国际赛车场举办了第一届中国大学生电动方程式汽车大赛(FSEC),一共有28支队伍参加了此次比赛,在中国引起了极大的轰动,到2019年,这一数量已经增加到57。中国大学生电动方程式汽车大赛的总成绩分为静态赛成绩和动态赛成绩两个部分,其各项目成绩分数如表1.1所示:
表1.1 赛事项目
项目分类 | 项目名称 | 分数 |
静态项目 | 营销报告 | 75 |
静态项目 | 赛车设计 | 150 |
静态项目 | 成本与制造分析 | 100 |
动态项目 | 直线加速测试 | 75 |
动态项目 | 8 字绕环测试 | 50 |
动态项目 | 高速避障测试 | 150 |
动态项目 | 耐久测试 | 300 |
动态项目 | 效率测试 | 100 |
从2015年赛事举办开始,赛事的竞争激烈程度不断升高,如今已经不像第一届比赛那样单单跑完耐久赛就能拿到一个好名次,各高校为了取得较好的成绩,必须不断提升技术水平,在各个项目中都拿到优异的成绩,才有机会端起大赛的奖杯。作为电动方程式赛车的关键技术之一的“整车控制技术”,它决定了方程式赛车性能的好坏。对电动方程式汽车大赛而言,整车控制器开发有三大优点:
自主设计整车控制器可以体现出亮点,在赛车设计答辩中可以获得较好的成绩
自主设计整车控制器,大大减少了采购的成本,在成本与制造分析中可以取得好成绩
通过对整车控制器的代码编写,使赛车在8 字绕环测试、高速避障测试、直线加速测试中处于最优动力模式;而在耐久测试中,赛车处于最佳经济性模式。使赛车在不同的动态项目中发挥出优异的性能。
基于此,本文提出了研究目标:首先对电动方程式赛车功能需求进行研究,然后对整车控制器的硬件与软件进行设计,最后进行整车控制程序编写。设计出适用于纯电动方程式赛车的控制器,使赛车在不同的工况下始终保持较好操纵性能和动力性能。
1.2 整车控制器的研究现状
整车控制器(VCU)作为纯电动方程式赛车最重要的组成部分,它主要负责赛车的工作状态的监测和控制,包括电机的转矩控制、整车工作状态实时监测、电池能量管理、制动能量回收,故障诊断及安全保护。整车控制器的性能对赛车能量控制、牵引力控制、稳定性有重要的影响。
关于整车控制器的设计,国内外学者进行过大量研究。
1.2.1 整车控制器国外研究现状
在自动代码生成技术方面,Peng Geng[1]对代码生成技术进行进一步的优化,其开发一个自定义驱动程序块集,支持高性能32位MPC5644A微控制器上的I/O设备。相对于传统Matlab / Simulink软件所生成的“半”自动代码,自定义驱动程序块集只需按一下按钮即可完成建模,代码生成,编译和下载。该方法在纯电动车整车控制器的开发中得到应用和测试,相对于传统开发方法来说,大大节省了时间和金钱。
Balaji Balasubramanian[2]针对商用车使用MATLAB软件对车辆控制策略进行建模和模拟,并且在测试平台环境中使用嵌入式控制器在环路中验证特定测试用例的环境和结果,并自主开发了一套电气的控制和诊断功能,实现了动力输出控制、传动系统能量流控制,制动能量再生和车辆模式控制
Jeong Soo Eo, Youn Kwang Jung[3]等人针对混合动力电动汽车(HEV)开发了组合控制单元,把电机控制器单元、整车控制器单元和电池管理系统单元集成在一个PCB电路板板上,经过车辆测试和测功机测试结果显示,与非组合(单个控制器)相同的混合动力车辆相比,组合控制单元实现了大约45%的成本和47%的重量减轻。
在电动方程式赛车方面,以德国斯图加特大学(KIT)以及荷兰Delft理工大学为代表,它们普遍采用四轮毂电机进行整车驱动,四轮毂电机[4]不但质量轻,而且具备较宽的转速范围,使用了四轮毂电机以及单体壳结构KIT车队赛车的整车质量仅仅只有167公斤,较低的整车质量可以把空气动力学原理发挥到极致,使得赛车在过弯时不会出现侧滑与漂移等现象,大大减少过弯时间,这是国内车队目前无法达到的。他们设计的整车控制器,不只是单纯对电机进行位置、转速、转矩开环控制,还要做到牵引力控制、电子差速以及制动能量回收控制,对赛车控制器有较高的要求。它们几乎都选用“V”模式开发流程,自动生成代码,维护时间短。
1.2.2 整车控制器国内研究现状
对于纯电动客车控制器研发方面,游运望[6]针对于厦门金龙旅行车有限公司的纯电动客车进行控制器开发,采用模块化的设计方法,选用TMS320F28335芯片作为整车控制器主芯片,该芯片在性价比、使用功耗 、运算速度 、存储大小、CAN网络通讯方面等均有很好的表现 ,完全可以满足纯电动客车的功能需要,实现了控制器可靠性与经济性的目标。
在纯电动汽车控制器方面,李川[7]设计了一款通用型的纯电动汽车整车控制器,它在纯电动汽车整车控制器上初次采用了双核微控制器,它能够将中断处理程序独自分配给一个内核,另外一个内核专门处理繁杂的算法而不受中断影响,克服了传统的单核微控制器由于大量中断请求命令而导致系统运行效率降低的弊端,提升了整个系统的稳定性和快速响应性。田韶鹏,阙同亮[8]在此基础上,使用Simulink软件模块对纯电动车整车控制器控制策略进行实现,首先对纯电动车的功能需求进行分析,设计整车控制策略,搭建整车控制模型,然后利用Simulink软件测试模型,最后输出可直接烧写的C语言代码,相对于传统手写代码而言,其开发周期短,调试难度较低。
在电动方程式赛车方面,罗俊林,邓涛[9]选用MC9S12XS128MAL作为控制器的主芯片,对整车控制器进行设计,制定赛车的上下电策略,驱动扭矩计算策略,台架实验和实车测试,最终实现了赛车驱动力矩控制,仪表盘液晶显示控制,故障检测和解决等功能,满足赛车的使用要求。
对于整车控制器电磁兼容较差、采集信号易受到干扰的问题,姜朋昌[10]使用分区隔离的办法对硬件进行了改良设计。改良后的整车控制器所采集的踏板传感器模拟电压信号较为稳定,控制器可以正确处理驾驶员意图信号,还能稳定实现故障诊断。
对于整车控制器安全性能方面,随着纯电动汽车电子的集成度变得越来越高,整车控制器安全性也愈发成为人们所关注的重点,王炜[11]对湖南大学电动方程式赛车整车控制器进行设计,根据ISO26262国际安全规范,设计了一款安全的整车控制器,提升了整车控制器的可靠性、安全性。
乔海术[12]主要针对纯电动汽车的控制策略进行制定,所搭建的控制策略模型分为整车控制模型、制动能量回收模型、踏板控制模型。整车控制模型主要是对高压上电到车辆行驶过程的控制。踏板模型是对油门踏板信号的采集,从而知道车手的意图,通过所制定的算法,得出电机的需求输出转矩。设计制动能量回收模型的目的是为了降低燃油消耗率、提高汽车续航里程。朱晓琪[13]在其基础上设计了较为完整的故障诊断及保护措施,通过对整车的常见电气故障进行等级划分,对不同等级故障设计诊断和故障解决方法。
总的来说,国内针对整车控制器的研究相对较晚,整车控制器研究还存在着很多不足。在硬件设计方面,虽然可以做到自主研发,我们仍然需要看到,我国芯片的研发水平比较低,国内芯片厂家只能生产出一些中低端芯片,达不到汽车级芯片的要求,因此国内整车控制器的芯片大都需要进口[14] 。并且控制器开发也采用传统串行开发方法,耗费时间长,维护困难。
1.3 研究内容和技术路线
本论文对 “某款纯电动方程式赛车”进行整车控制器设计,主要完成了下列工作:
1)第一章首先对中国电动方程式汽车大赛进行总体介绍,然后对电动方程式赛车控制器开发的目的及意义进行介绍,最后对整车控制器的研究现状进行总体分析。
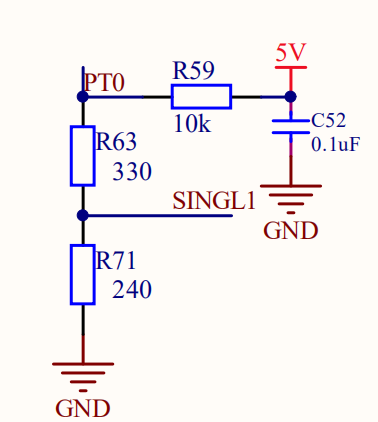
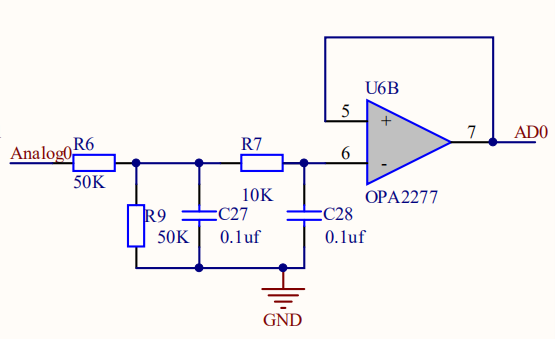
2)第二章使用串行开发方法对整车控制器进行开发,首先对电动方程式赛车功能需求进行分析,然后对整车控制器的硬件进行设计,主要包括主芯片的选型、最小系统模块设计、CAN网络通信模块设计、输入模块设计、继电器模块设计,最后对整车控制器进行硬件测试,通过示波器实时显示测试信息。
3)第三章对电动方程式赛车控制器软件控制策略进行设计,软件设计包括上下电逻辑控制、闭环转矩控制,最后基于所设计的整车控制器进行控制程序设计。
4)第四章对整车进行电气故障检测与处理,对所检测的故障进行分级,选取最高等级,然后对不同的电气故障等级执行不同的控制策略。
具体的控制技术路线如图1.1所示:
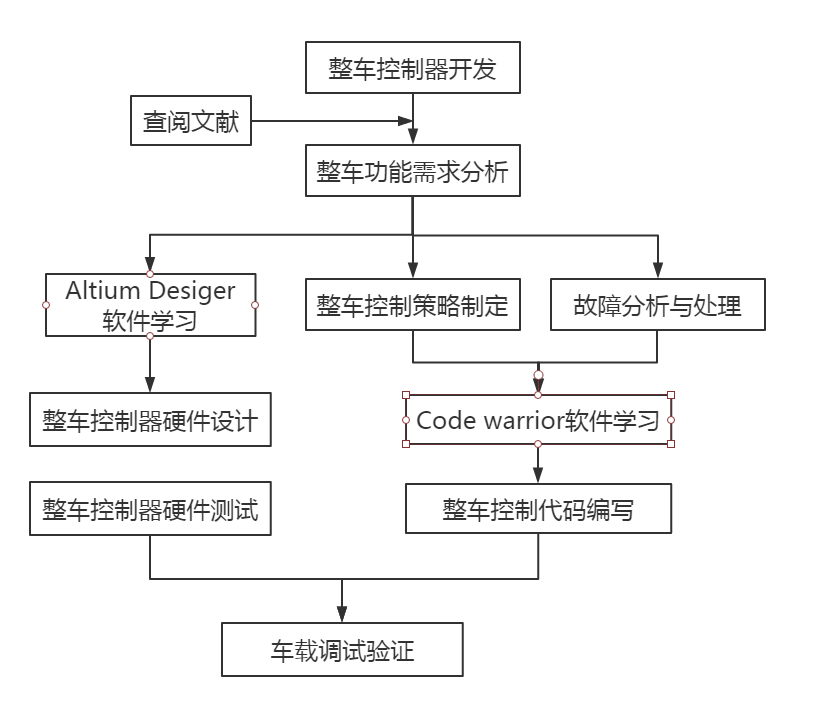
图1.1 技术路线图
第2章 电动方程式赛车整车控制器硬件设计
电动方程式赛车整车控制器开发的本质为整车控制器嵌入式开发,良好的硬件设计对整车控制器的经济性、稳定性至关重要,本章针对整车控制器的硬件进行设计与测试,主要包括主芯片选型、最小系统电路设计、CAN网络通信电路设计、信号输入电路及驱动电路设计等,最后对硬件进行测试。所设计的整车控制器硬件构成如图2.1所示。
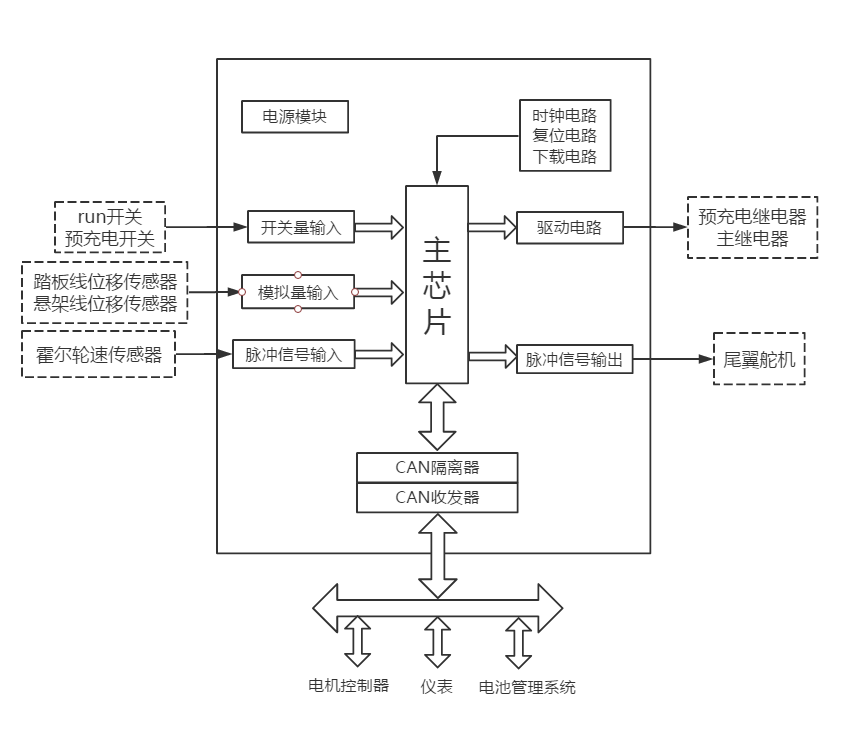
图2.1整车控制器硬件设计框架
2.1 主芯片的选型
整车控制器对传感器信号进行采集,根据所制定的控制算法对信号进行分析,结合赛车手意图,得到最终的整车控制信息,通过两路CAN总线分别向电机控制器以及电池管理系统发送信号,实现对电机与电池的实时控制,使赛车能稳定运行。对于整车控制器的硬件设计,主芯片最好包含较多的外设接口,满足赛车的使用要求。所选用的主芯片性能尽可能要高,最好还要有丰富的管脚。芯片选择要求如下:
1、较高的处理速度。电动方程式赛车在运行工况下,外部工况在持续的变化,整车控制器对传感器信号进行采集,采集的信号需要被迅速分析和处理,根据所制定的整车控制流程,对赛车电机驱动系统的进行快速控制,实现赛车在不同控制模式的快速转换。
2、较好的稳定性。整车控制器一般工作在-40~80℃范围内,工作环境较差、电磁干扰问题严重,因而对整车控制器具有较高的稳定性要求。
3、主芯片要有I/O接口、BDM调试接口、ATD模数转换接口、SCI串行通信接口以及CAN网络通信接口。
根据电动方程式赛车的功能需求,本文整车控制器采用Freescale公司的MC9S12XDP512MAL作为整车控制器主芯片,该芯片拥有丰富的外设资源:
5路CAN通讯接口、22路SCI接口、91路I/O口
MC9S12XDP512MAL是汽车级芯片, “M”代表芯片的工作温度在-40~125℃范围内,“AL”代表112管脚,满足控制器稳定性需求。
内部时钟频率高达40MHz,锁相环时钟频率可达80MHz。其总线频率满足整车控制器快速响应性的要求。
MC9S12XDP512MAL的外围引脚如图 2-2 所示
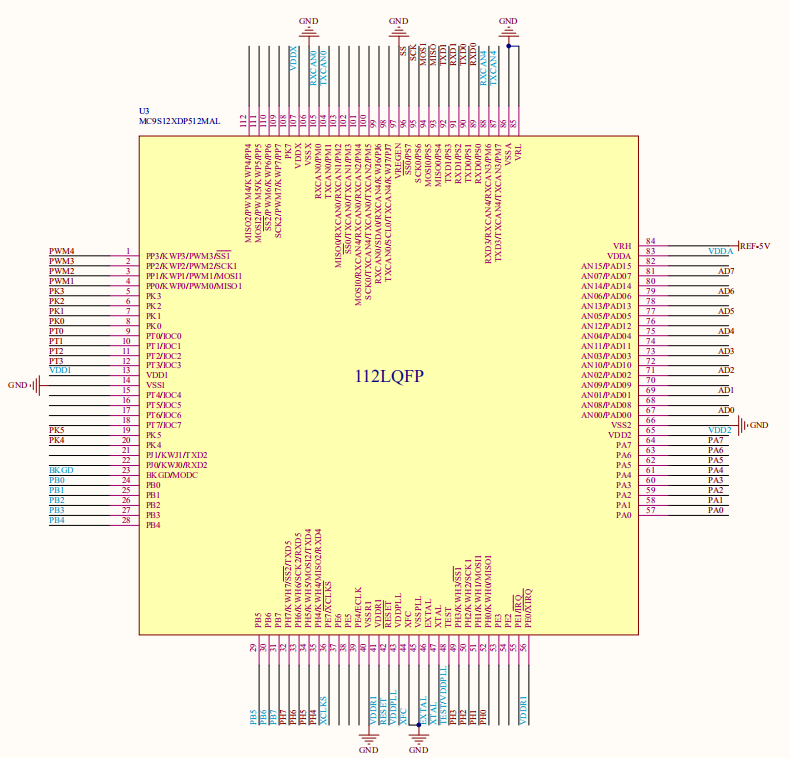
图2.2 MC9S12XDP512MAL引脚图
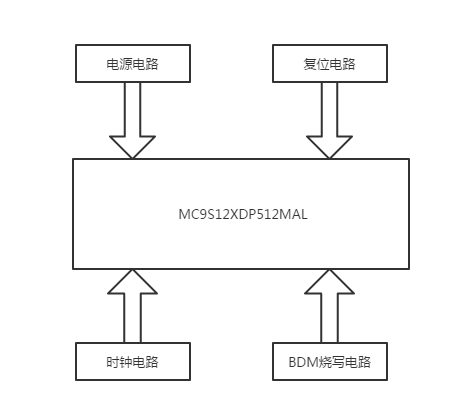
2.2 最小系统模块设计
整车控制器最小系统是由主芯片外部接上电源电路、时钟电路、BDM烧写电路和复位电路构成的一个基本应用系统,它是整车控制器硬件设计的铺垫。
最小系统如图2.3所示:
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: