基于FPGA的组合惯导系统的数据采集模块设计毕业论文
2020-02-17 23:24:27
摘 要
光纤陀螺作为组合惯导系统中的核心部件,在线形测量中有着举足轻重的地位,现如今,随着我国光纤陀螺的自主研发技术日益精进,相关生产工业发展迅速,曾经只在军事、国防、航天等领域大规模使用的组合惯导系统,如今也可为国民工业进行服务。近年来,武汉理工大学国家光纤传感器工程实验室成功地将光纤陀螺仪惯性制导技术应用于线性测量。
本课题就将在Xlinx公司生产的AX309型号的FPGA开发板的基础上,利用Verilog HDL编程软件ISE14.7设计出一个基于FPGA的光纤陀螺数据采集模块,实现将光纤陀螺发送的数据进行实时性的接收和存储两大功能。
关键词:光纤陀螺;组合惯导系统;FPGA;Verilog HDL;数据采集模块
Abstract
Fiber optic gyroscope as the core component in integrated inertial navigation system, has a pivotal position in the linear measurement, nowadays, along with our country independent research and development of fiber-optic gyroscope (fog) technology develop, are related to the production industry development is rapid, once only in the field of military, defense, aerospace and other large-scale use a combination of inertial navigation system, now can also service in the national industry.In recent years, the fiber optic sensing national engineering laboratory of wuhan university of technology has successfully applied fiber optic gyro inertial navigation technology to linear measurement.
Based on the Verilog HDL development board of model AX309 produced by Xlinx company, this paper designs a data acquisition module of fog based on FPGA by using ISE14.7 software, and realizes the real-time receiving and storage of the measured data of fog.
Experimental measurement shows that this module can receive the data transmitted by the gyroscope in real time and store it in the SD card.
Key Words:fiber-optic gyroscope;Integrated inertial navigation system;Verilog HDL;data acquisition module;FPGA
目录
第1章 绪论 1
1.1 研究目的及意义 1
1.1.1 捷联惯性导航系统概述 1
1.1.2 捷联惯性导航系统特点介绍 1
1.1.3 组合惯导系统中的传感器介绍 2
1.2 研究现状 3
1.2.1 光纤陀螺研究现状 3
1.2.2 惯导系统研究现状 3
1.3 研究内容 4
第2章 FPGA与Verilog HDL的主要技术概述 5
2.1 FPGA 5
2.1.1 FPGA技术简介及其特点分析 5
2.1.2 FPGA开发流程 6
2.2 Verilog HDL概述及其技术特点 8
第3章 TXD6-A2光纤陀螺介绍 9
3.1 TXD6-A2的通信协议 9
3.2 TXD6-A2主要性能指标 9
第4章 数据采集模块的设计与实现 10
4.1 功能需求分析 10
4.2模块分块化设计 12
4.2.1 50M(HZ)分频程序设计 12
4.2.2 串行数据总线(UART)模块设计 12
4.2.3 字节提取模块 13
4.2.4 数据转码模块 13
4.2.5 SD卡存储模块 13
4.2.6 顶层模块例化 13
4.2.7 UCF文件的设计 13
第5章 数据分析 15
5.1 检测模块采集的数据是否掉帧 15
5.2 检测采集数据是否正确 16
5.3 误差分析 18
第6章 全文总结与未来展望 19
6.1 全文总结 19
6.2 未来展望 19
参考文献 20
致 谢 21
- 绪论
1.1 研究目的及意义
1.1.1 捷联惯性导航系统概述
惯导系统是不借助任何外部信息,只依赖于系统自身来进行导航的一种独立性系统。惯导系统在使用时隐蔽性很好,可以在任何复杂的环境下进行工作。按照组成结构的不同,主要分为平台式惯导系统和捷联式惯导系统两大类。
捷联惯导系统是一种借由三个测量角速率的陀螺仪、三个测量线加速度的传感器和一个微型PC的组合来进行导航的一种系统,没有固定的框架结构。惯性导航系统的基本工作原理是以牛顿运动定律为基础。导航系统会测量出搭载系统的运动载体的加速度,求得加速度对时间的积分,然后将求得的积分通过线性变换导入到导航系统的坐标系中,从而得到运动载体在导航系统的坐标系中的速度、偏转角和所在位置等信息。在捷联惯导系统中,平台的作用和概念这两个方面都会在计算机中得以体现,它们的本质是一个写在计算机中的方向余弦阵。在惯导系统中,有直接安置在运动载体上的能够沿着载体坐标轴的分量测得相对惯性空间的加速度和角速度的器件,通过相应的数学运算,可以将这些分量转换到要求的计算机坐标系内以供使用。当这个矩阵可以描述载体和地理坐标系之间的关系时,由载体坐标系测得的相对惯性空间的加速度和角速度,经过转换后便可得到沿地理坐标系的加速度和角速度分量,导航计算机可以利用方位已知的加速度和角速度分量,根据相应的力学方程求解出要求的导航和姿态参数来。
1.1.2 捷联惯性导航系统特点介绍
与平台惯性导航系统一样,捷联惯性导航系统能够准确地提供姿态、地面速度、纬度和经度等载波导航参数。但由于平台式惯性导航系统通常需要将两套惯性导航装置安装在一个运动载体上,极大地增加了整个系统的购置和维护费用,同时还会对测量的结果造成一定的误差,所以平台式惯性导航系统在时代的发展中逐渐被淘汰。而在捷联惯性导航系统中,由于计算机中自带了一个针对方向余弦的参考系,将平台系统中的通过物理形式实现的参考系淘汰掉,因此,捷联惯导系统有以下独特优点:
(1)拆除掉了平台式惯性导航系统中体积庞大又不实用的机械平台,对系统进行了瘦身,缩小了原有系统庞大的体积和质量,使得新的惯性导航系统结构简单,从而降低了搭建、修理系统时的费用。
(2)没有固定的机械平台,使得整个惯导系统的使用更加灵活,将曾经系统启动时需要漫长等待的过程大大缩减,也使系统测量出来的数据更加精准。
(3)去除掉了锁定的框架系统,使新的惯性导航系统不再局限于某一些方位的测量,而是可以进行全方位的测量。
(4)能够提供更加丰富多样的数据,使得其可以对更多的目标进行测量,功能更加多样。
1.1.3 组合惯导系统中的传感器介绍
本次课题中的组合惯导系统将会运用到各种类型的传感器,如光纤惯性传感仪表FOG、里程计、位置传感器、倾角传感器等,在惯导系统中,每一个传感器都会有相应的任务,它们共同作用来为惯导系统提供完整的数据。
(1)光纤传感线形仪表FOG
光纤线形传感仪表FOG的主要作用是测量角速度,干涉型闭环FOG的内部光学结构主要是由光源、探测器、光纤耦合器、Y波导集成光学器件与光纤线圈等部分构建而成[1]。光纤线性传感仪表FOG的电路部分由放大器,数模/模数转换器,组合逻辑电路等通过正确的电路连通规则组合而成。它的组合逻辑电路由已进行代码编译后的FPGA模块构成。主要是为了实现FOG产生的误差信号的数字解调、积分、产生数字相位阶梯波以及偏置调制信号等,进而获得准确的数字角速度值,该值再经过向下抽样滤波器后转换为低采样率的数字量向外输出[2]。
(2)倾角传感器
倾角传感器的主要作用是为测量角运动参数提供一个辅助参数,基于牛顿提出的运动学定律,在一个系统的内部,速度是无法被测量的,但是其加速度是可以被测量的。当初速度已知时,系统内部的直线位移会经由数学积分被计算出来,所以倾角传感器本质上是一种运用惯性原理的加速度传感器。它的主要参数倾斜角可通过计算重力轴与加速度敏感轴之间的夹角来得出。
(3)位置传感器
位置传感器的主要作用是检测搭载组合惯导系统的载体的位置,位置传感器是一种能感受被测物的位置并转换成可用输出信号的传感器。它能将感受到被测物的位置并转换成可视化数据。
(4)里程计
里程计的作用是记录载体走过的路程和测量载体行驶的速度。
1.2 研究现状
1.2.1 光纤陀螺研究现状
世界上最早的一台陀螺罗经诞生于1908年3月,并在不久后就于航海领域中进行了第一次的使用,迄今为止,陀螺仪已经经过了110年的发展,目前已经有了较为成熟的理论体系,并且已经在多个领域中发会自己的作用。
光纤陀螺是现阶段最新的陀螺仪,其本质就是一个角速度传感器。同他的前身激光陀螺仪相比,构成光纤陀螺仪的部件较少,并且没有可以发生相对运动的元件,故没有磨损发生[3]。由于光纤陀螺具有体积小,质量轻,拥有较高分辨率,工作稳定性更高等众多优点,刚一问世,便受到众多相关领域工作者的喜爱和推崇,将其广泛应用于航空航天、国防军事、国民工程等众多领域。
构成光纤陀螺的三个核心部件分别是调节器、宽带光源以及传感器。光纤陀螺仪目前主要有两种,分别是集成型光纤陀螺仪和全光纤型光纤陀螺仪[4]。其中集成型的光纤陀螺仪会把调节器等主要元器件配置在同一块芯片上,使得它在工作时不会因为元器件的分散而导致系统不稳定,同时由于现在集成芯片的技术已经相当成熟,如此安装方法还可以实现集成型陀螺仪的大规模工业生产,也能将生产价格大大降低。全光纤型光纤陀螺仪基本都是使用的光纤材料,同时在其内会把几乎全部的光学元件都安装到同一条光纤上,这是它与集成型光纤陀螺的最大不同点。现阶段,由于现有技术的有限,即使全光纤型的光纤陀螺技术已经比较完善,它也无法运用到精密的测量研究中,因此全光纤型光纤陀螺仪现在更多的是使用在精度要求不高的部分工业中。
在国家国防以及经济发展的过程中,由于组合惯导系统的大量运用,作为其核心部件的光纤陀螺仪也随之发挥出巨大作用,因此世界各国对光纤陀螺仪的研发都相当重视,但每个国家都各有侧重点。以欧美国家和日本为例,欧美在应用于军事以及航空航天领域的中高精度光纤陀螺仪上取得了较高的水平,而日本研究的中心在于应用在商业上低精度光纤陀螺仪[5]。但是值得欣慰的是,我国光纤陀螺仪技术及应用取得了丰硕的成果:陀螺仪精密度的研究走在了世界前列,达到了精密级,同时还提高了惯导系本身的自适应性,使得系统能够更加稳定地运行;解决了无法自行生产关键工艺设备的问题,实现了相关生产工艺的国产化,为国民的高品质生活提供了更多的便捷,在未来的一段时间内,如何提高光纤陀螺的分辨率和稳定性,将会成为各个国家重点研究的问题。
1.2.2 惯导系统研究现状
惯性导航系统可以根据构建导航坐标系的方法的不同分为两种,一种是捷联式惯性导航系统,另外一种是平台式惯性导航系统[6]。捷联式惯性导航系统主要就是利用加速度计和陀螺仪,将这两者全部安装到相关的运动载体上,这样陀螺就能够对相关的坐标转换系数进行计算。在平台式惯性导航系统中,所有的加速度计全部都会被安装在一个由陀螺仪进行相应控制的稳定平台上,这样整个平台就会具有良好的工作稳定性,能够确保与导航坐标系始终保持一致,以此为基础就能够进行相关的导航。捷联式惯性导航系统主要是利用数学方法来进行坐标系的建立的,这一导航系统并不需要使用相关的物理平台,有着可靠性强、结构简单和体积小的特点,但是这一系统在使用的过程中会涉及到较大的计算量,这时就需要有着高效的微处理器,还有优秀的算法,否则捷联式惯性导航系统是无法使用的[8]。而平台式惯性导航系统有着可靠性差、结构复杂和体积大的缺陷,相对于捷联式惯性导航系统来说,平台式惯性导航系统已经逐渐的被捷联式惯性导航系统所替代,这是因为平台式惯性导航系统的缺陷极为突出,对于导航的准确性会产生不良的影响。
目前世界上惯导系统主要应用于航天、航海、军事、工程等四个方面。惯性导航技术在军队中得到了广泛的应用,它主要使用陀螺积分加速度计结合两个双自由陀螺仪,形成一个简单的惯性导航系统;同时惯性导航系统还可以通过运动载体上的多个导航设备来提供相关的数据对相关的姿态、速度和位置进行求解,可以获得较多的导航信息,这种利用多个惯性导航系统的技术称为组合惯导系统技术;至于惯导系统在工程上的应用则主要是运用在桥梁,房屋等的线形测量中,利用惯导系统中的多个传感器来获取信息并进行数学解算,便可检测出桥梁和房屋等建筑产生的形变量,从而检测它们是否安全。
1.3 研究内容
本毕设是在“海南高铁站屋顶形变检测”的项目背景下,对于该线性测量中的组合惯导系统进行相关学习,同时设计出一个针对该组合惯导系统中的光纤陀螺仪的数据采集模块,用于实时接收光纤陀螺测量出的数据,完成数据的实时接收和采集,主要内容为:
(1)数据的采集:主要实现的功能是将组合惯导系统中测量出的角速度,加速度等数据输出后进行顺序采集以便于后续的储存。
(2)数据的储存:主要实现的功能室将采集到的角速度,加速度等数据通过SDRAM的缓存最终储存到SD卡中以便于后续的数学计算以及最终的分析。
第2章 FPGA与Verilog HDL的主要技术概述
2.1 FPGA
FPGA全称为Field-Programmable Gate Array,中文名称为现场可编程门阵列,它的发展是以GAL(Generic Array Logic,通用阵列逻辑)、PAL(Programmable Array Logic,可编程阵列逻辑)、PLD(Programmable Logic Device,可编程逻辑器件)等可编程器件为基础[7],作为可编程逻辑器件的第四代产品,自从1985年第一款FPGA产品的问世发展至今,给半导体领域带来了一次革命,并且得到了广泛的应用。
2.1.1 FPGA技术简介及其特点分析
关于FPGA,可以将其看成是一种半定制专用集成电路(ASIC),其采用了逻辑单元阵列 LCA(Logic Cell Array)的结构,内部包含了三部分分别是:输入输出模块 IOB(Input Output Block)、可配置逻辑模块 CLB(Configurable Logic Block)、和内部连线(Interconnect)[8]。
FPGA相对于它前代的可编程逻辑器件,具有更加高效的工作效率,更加大量的逻辑单元,同时在使用FPGA进行编程时具有更高的自由度,因此得以在各类电子产品中被广泛应用。FPGA初一问世,就由于它可在现场编程以及拥有庞大数量的逻辑单元的特点,使得电路设计中的大部分繁琐工作可简化为在微机上进行,使得它受到电路和系统设计者的喜爱和推崇,成为当今电路发展中的一种主流电路。FPGA芯片通过借助CAD技术,可以极大地缩短开发所用周期,减小开发投资的风险。由于FPGA芯片中具有相当高密度的逻辑单元,样品的体积和器件的功耗也会因此而大大减小,这样用户在使用时可以直接在实验室开发出大规模专用集成电路。至于FPGA的功能,只要用户不改变FPGA的外部接口,都可以随意地通过自己编写的程序,配置成模块,然后将其烧录到FPGA芯片中来得到实现。也因为这一特性,它非常适用于各种小批量、多品种的军工设备的研制,为国防工程带来了相当大的便利。目前,国内外已经将FPGA普遍运用于产品设计和科研工作中。
FPGA的主要特点有:
(1)使用FPGA芯片设计出来的ASIC电路,用户不需要再额外进行繁琐的芯片生产工作,就能得到适合自己使用的芯片[9];
(2)FPGA内部自带大量的外部通信接口和触发器,可以方便地连接外部设备;
(3)FPGA采用高速CHMOS工艺,功率损耗低,支持与CMOS管、TTL电平兼容;
(4)FPGA具有工作效率高,代码适应性强,开发时间短的优点。
2.1.2 FPGA开发流程
FPGA设计是指利用FPGA器件完成相应设计要求的过程,在进行设计时要准备好各种相关的程序编写,逻辑仿真等工具。主要分为设计开始前的准备、设计前逻辑关系的输入、设计中逻辑功能实现、设计后程序功能的验证和对逻辑器件进行编程这五个部分。每个部分只有功能差异,而没有严格的顺序,可交替或重复进行。基本的开发设计流程如图2.1所示。
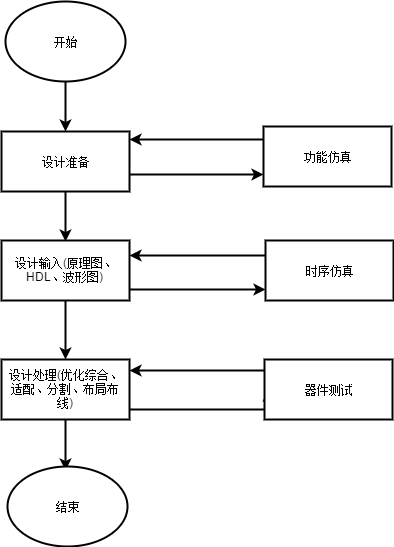
图2.1FPGA的开发设计流程图
(1)设计开始前的准备
在进行FPGA器件的开发设计之前,首先需要构想出几套可行的设计方案,然后逐一进行论证选出最优化的方案,之后根据最终选择的方案选择与之合适的器件。设计人员首先对系统所需的功能和复杂性、工作速度的要求、设备本身的成本以及布线的分布进行分析,权衡其中的利弊,去粗存精,以选择合适的设计方案和相关设备。
(2)设计中逻辑关系的输入
设计输入的目的是为了将预想的逻辑关系输入到计算机中,用计算机来对设计者所设想的某种逻辑关系进行一个验证,观察是否可行。
(3)设计中逻辑功能的处理
第二步中设计输入到计算机的文件验证可行后,就开始进入到设计处理环节中了,这一步是整个FPGA设计过程中最为核心的一步了,它关系到后面程序的编写能否顺利进行,这一步中,会首先对输入的文件进行一个逻辑上面的简化,删掉繁琐重复的逻辑步骤,然后进行综合优化,确定输入的文件达到最简洁。并且会适当地用一片或者多片器件进行自适应配置,最后产生编程用的编程文件[10]。
(4)设计后对程序功能的验证



