基于STM32单片机的光纤线形测量系统的数据融合模块设计毕业论文
2020-02-17 23:24:29
摘 要
近年来,光纤陀螺仪在航空航天及军事领域有了很多成果,而由此衍生出来的光纤惯性线形测量系统则利用光纤陀螺组合惯导取得的成果,对原本用于航空航天、军事导航的技术进行了扩展和整合,服务于国民工业和大型工程领域,例如桥梁、下水管道的形变测量及矿坑的挖掘进度测量等。
本课题基于海南站屋顶形变测量这一研究项目,主要目的为设计数据融合系统,用于整合包括陀螺仪在内的各类传感器的数据。线形系统主要模块为组合惯导模块,此外还包括倾角传感器、位置传感器和里程计等各类传感器。本毕业设计课题将基于STM32单片机,设计数据融合模块,实现各数据的实时采集和各传感器数据融合,完成输出频率各不相同的各传感器数据的实时接收、整合和存储。
关键词:光纤陀螺;STM32;线形系统;数据融合
Abstract
In recent years, fiber optic gyroscopes have made many achievements in the aerospace and military fields, and the resulting fiber inertial linear measurement system utilizes the results obtained by the combination of fiber optic gyroscopes and the original technology used in aerospace and military navigation. It has been expanded and integrated to serve the national industry and large-scale engineering fields, such as deformation measurement of bridges and sewers, and excavation progress measurement of pits.
This project is based on the research project of roof deformation measurement in Hainan Station. The main purpose is to design a data fusion system for integrating data of various sensors including gyroscopes. The main modules of the linear system are combined inertial navigation modules, in addition to various types of sensors such as tilt sensors, position sensors and odometers. This graduation project will be based on STM32 MCU, design data fusion module, real-time data acquisition and data fusion of each sensor, real-time receiving, integration and storage of each sensor data with different output frequencies.
Key Words:Fiber optic gyroscope;STM32;Linear system;Data Fusion
目录
第1章 绪论 1
1.1 课题的背景及意义 1
1.2 国内外发展现状及其分析 1
1.2.1 光纤陀螺及其惯导系统的发展 1
1.2.1 线形监测研究现状和方法比较 3
1.3 本文的主要工作 5
第2章 设备选型 7
2.1传感器选型 7
2.1.1 光纤陀螺 7
2.1.2 MP6050传感器 8
2.1.3 光电传感器 9
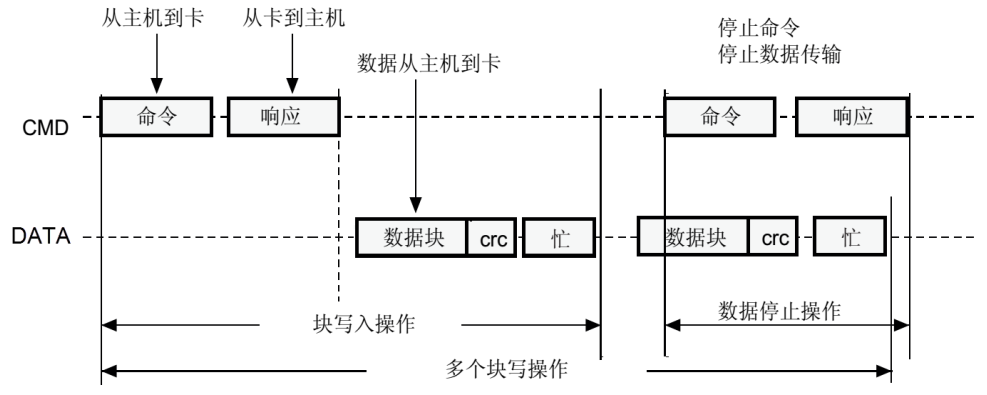
2.2 SD卡简介 9
第3章 软件设计方案的选择 11
3.1 DMA 串口空闲中断 11
3.1.1 DMA简介 11
3.1.2 串口空闲中断 11
3.2 先存储后处理 12
第4章 系统设计 13
4.1 系统硬件设计 13
4.2 系统软件设计 14
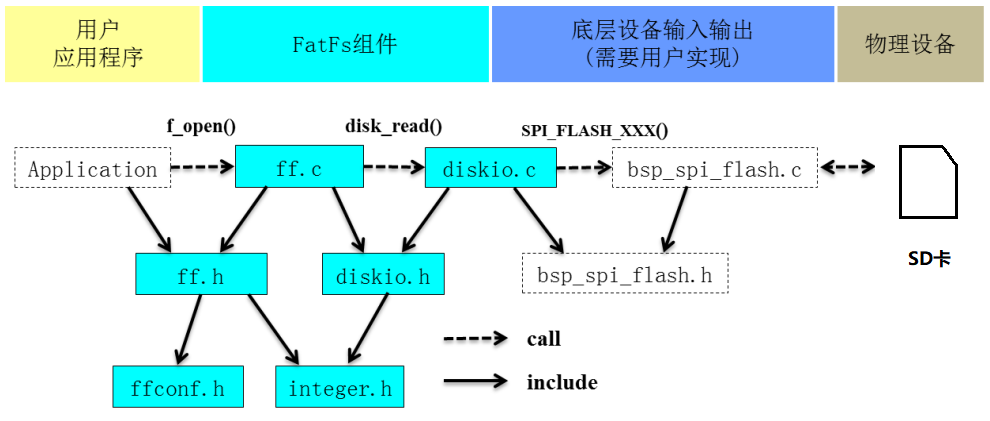
4.2.1 FATFS文件系统 14
4.2.2 软件系统设计 15
第5章 接收陀螺仪数据分析 17
5.1陀螺仪测得竖直放置的数据 17
5.2 陀螺仪测得水平放置的数据 18
总结 19
致谢 20
参考文献 21
第1章 绪论
1.1 课题的背景及意义
惯性导航系统作为一类独立工作无需考虑外部条件的导航系统,可以通过将测得的敏感器件的原始数据,即角速度、位移、加速度、经纬度、高度等进行解算处理来获得运载体的实时状态信息,包括姿态角、位置和速度等。由于机械搭载结构的不同,惯性导航系统可分为两种:平台式,需要实际机械平台;捷联式,不需要机械平台[1]。捷联式惯导系统将测数据所需的传感器直接装载在载体上因而其不需要实际的机械平台,敏感器件的感应轴随载体运动状态改变而改变。捷联惯导系统作为军事、民用两大领域的主要导航设备,具有性能稳定、体积较小及装载简单、维护方便的优点。陀螺仪作为角运动敏感器件,是惯导系统中最重要的组成部分,它输出的角速度信息通过解算可以输出为载体的导航参数信息在数学平台显示,实现导航定位计算所需的基准坐标系[2]。
科技在不断发展,高效稳定的方案需求促进了人们对于技术的不断创新。工程结构形变的测量,例如三峡大坝形变测量、桥梁长时间形变监测、海南站屋顶形变测量、轨道形变检测等,其作为不论是在国民经济建设亦或是军事建设中都是不可或缺的一项检测,存在有许多亟待解决的问题也有许多可以进行改善优化的方面[1]。经纬仪、水准仪及全站仪作为传统的工程形变的测量方法虽然测算出的数据精度高,但是存在测算步骤复杂、不易安装、测量周期长、不易重复多次测量且不易确定基准点的问题,在人力物力时间上的消耗都十分巨大。传统测量方式均为针对某一方向上形变的测量[3]。但屋顶形变测量需监测整个屋顶表面在三维上的形状改变。显而易见,传统的测量方法并不适用。GPS技术虽然测量速度快、效率高,不必耗费过多的人力物力,相对于传统测量方法要便捷许多,但其测量误差比传统测量方式大,测量精度较低,还会由于接收信号的好坏受到天气和遮挡物的影响。组合惯导技术不仅能得到三维的姿态,即通过检测三个方向的角速度和加速度进行解算,也无需选定固定的基准点用于空间校准,只需要确定起始位置作为参考点就能够绘制出惯导的三维运动轨迹[4]。此外,惯性系统并不依赖外部的位置信息、光线、参照物来进行测算,就不会受到此类方面的局限和干扰,测量结果只与惯导的运动姿态有关,与传统测量方法相比具有极大的优势,因而使用惯性导航系统来测量工程形变是一项十分有意义的研究课题。
1.2 国内外发展现状及其分析
1.2.1 光纤陀螺及其惯导系统的发展
1970年,V.Vali和他的助手在实验室中进行了对光纤陀螺的研究,这标志了光纤陀螺研究的起始。在接下来的30年里,研究人员在光纤陀螺的研制应用方面做出了许多杰出成就:从1977年起始及随后的5年里,研究人员通过实验研究出光纤陀螺内部的构成,按照其内部结构分为了开、闭环两种;1980至1990年间,研究人员在光纤陀螺的诸多制作工艺方面的研究上取得了相当大的进步[5]。光纤陀螺仪至此开始受到军方的欢迎,与陀螺仪相关的各类技术都在军队中得到使用,与此同时,光纤陀螺仪的开发成本开始有所降低,体积有所减小而效率有所增加,使这项技术更适合于民用领域。目前,各国研发光纤陀螺仪的公司生产的光纤陀螺仪可以满足各种场合中各种应用的需求[6]。
美国是第一个开始研究光纤陀螺的国家。1980年,美国已经开始对光纤陀螺进行了深入的研究,其中作为代表的公司是美国霍尼韦尔公司。霍尼韦尔公司研制的高精度光纤陀螺仪主要用于空间定位和水下导航,并一直在此领域处于领先地位。霍尼韦尔公司从1980年就已经着手开发各种不同类型的精密光纤陀螺仪,直到今天,霍尼韦尔已经生产了许多专为民用飞机开发的高精度光纤陀螺仪。开环光纤陀螺仪作为其早期产品研发中使用的陀螺仪,由于其光路结构使用SLD类型的光源和压电相位调制器,导致精确度较低,不适合投入实际使用,因而仍处在研究的阶段。之后其公司开始专注于开发较之精密的闭环光纤陀螺仪,用于改进陀螺仪内部的光学电路,使其精确度有所提高。经过十多年的努力,霍尼韦尔公司终于研究制作出了比传统战术陀螺仪精度高数千倍的高精度光纤陀螺仪。2003年,美国军方与波音和Trident 2洲际签约,导弹策略核潜艇导航系统中的敏感设备取代了之前使用的静电陀螺惯性导航系统,并安装了霍尼韦尔的干涉仪光纤陀螺用于解决实际方案中的问题[7]。
美国的Northrop Grumman公司作为现今大多数使用光纤陀螺仪作为主要传感器传输数据的导航设备的研发公司及制作厂商,迄今为止已经制造了七万多种不同类型的光纤陀螺惯导设备用于各种不同领域的测算导航。该公司的导航设备包括用于测速的陀螺仪,感知姿态信息的惯性敏感部件和实时测算更正的导航设备。LN-251作为其公司从1980年后研发的一种基于光纤陀螺仪的惯性导航产品[8],与原先的惯导系统相比最显着的改进是用光纤陀螺实时测量的角速度信息来代替角度变化量,更加精确,反映物体的实时姿态。光纤惯导系统与激光惯导系统相比,虽然都是使用的陀螺仪,但是由于光纤陀螺使用的电源功率小、机械振幅小,使其惯导系统具有较好的稳定性。
法国IXSEA集团是欧洲着名的光纤技术制造商,其前身是Photonics集团的惯性实验室。Photonic Group成立于1979年,并于2000年9月更名为IXSEA。自20世纪90年代初以来,光子公司一直专注于光纤陀螺仪研究。随后,光子学提出了数字解调和相 位斜变调制的全数字化概念[9]。1990年之后,掺饵光源开始应用于光纤陀螺技术中。由于这项技术的不断完善,光纤陀螺在噪声和零偏等干扰误差方面的影响有了显著降低,这也为光纤陀螺的光源复杂结构研究方向提供了新的思路。自1995年以来,IXSEA集团一直专注于使用光纤陀螺仪作为敏感设备的导航设备。2000年,IXSE集团开发了PHINS,这是一种专用于海洋勘探的新型惯性导航系统,利用其在开发高精度光纤陀螺仪方面的技术经验。由于所有内部固定元件的优点,长寿命,优异的绝缘性能和广泛的测量范围,光纤陀螺仪越来越多地用于航空航天应用。 IXSEA集团研发生产的光纤惯性导航系统在1995年左右开始就已经投入了飞机等巡航系统领域。其生产的光纤惯性导航设备“AS T R I X”系列在空间导航这一方面实现了各种需求,成果令人惊叹[10]。
我国相对较晚才着手进行对光纤陀螺仪的研究。虽然与西方发达国家的研究进展有一定差距,但研究人员通过不断地努力在这一领域取得了很大进展,相信在不久的将来我国也能研究出高精度且优于其他各国的陀螺仪用于工程实际。中国如今已经开始使用中低精度的陀螺仪来实现基础的数据接收处理[11],并在这一方面有所建树,也开始慢慢向高精度陀螺仪领域迈进。越来越多的单位公司开始开发光纤导航系统。各大学及研究所均在光纤陀螺研究领域取得了显著的成果,MEMS器件开始进入中国市场,微型加速度传感器也开始走进人们的视野。
1997年,由第13航空航天实验室引入的Y型多通道光纤陀螺改善了陀螺仪的零偏置稳定性。2011年5月18日成功建成玻璃纤维陀螺仪新技术生产线。这是国家玻璃纤维陀螺仪产品发展和改革委员会支持的唯一项目[12]。这证明了我国在光纤陀螺及其惯性导航系统投入军事民用市场的极大潜力,这也促使研发人员投入更大的热情和精力在高精度光纤陀螺仪领域。近年来,我国军事战略上的极大进步离不开高精度陀螺仪的不断研发进展。 1998年,中国海军测试了新开发的Eagle Strike 62巡航导弹,是一种远程导弹,在测试过程中取得了相较于之前的巡航导弹更加优异的成绩。此后Eagle Strike 62远程反舰导弹也参加了国庆阅兵。这表明在中国配备光纤陀螺导航系统的武器在实战中的可行性,这对中国武器的快速发展产生了积极影响[11]。
1.2.1 线形监测研究现状和方法比较
在线形工程监测和测量的长期实施中,许多专家和科学家提出了各种结构形变,线形监测和测量方法。然而,这些方法总会存在一些无法忽视的短板或难以达到的要求。近年来,随着各类传感器测量技术和计算机解算绘制分析技术的飞速发展,许多专家和研究人员提出了新的工程测量和监测方法。相较于传统的测量方法灵敏度大大提高,并且还解决了先前测量方法可能出现的一些问题和一些难以达到的要求的解决。虽然新技术还存在很大的改进优化空间,但也为这一工程领域提供了许多新思路[13]。以下是常用方法的总结:
(1)水准仪法
水准仪法作为一种基础的人力测量方法,在计算机技术还未发展成熟时,是工程形变测量的常用方法,具有结构简单,原理易懂的优点。测量形变数据的时候需要将标尺竖直放置在待测位置,通过水准仪对其进行测量即可。当桥梁存在垂直形变时,仪器显示的刻度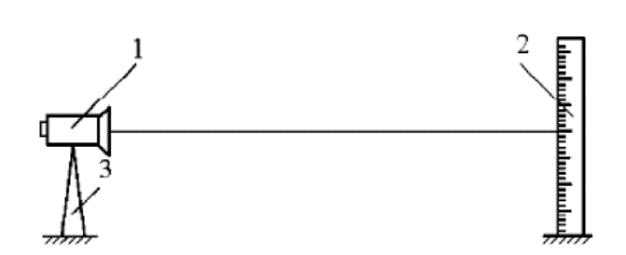 会相应地改变。在这一点上,它可以看作是工程形变的表达。测量原理如下图1.2.1所示。 1为水 准仪,2为标 尺,3为脚 架。
会相应地改变。在这一点上,它可以看作是工程形变的表达。测量原理如下图1.2.1所示。 1为水 准仪,2为标 尺,3为脚 架。
图 1.2.1 水准仪法
这种传统的测量方法虽然简单直观但是存在很多无法忽视避免的缺点。首先是存在安装不便的问题。这种测量面狭窄的精确测量方式对观察点和仪器之间的距离有严格的要求,如果距离不正确,测量精度将会降低甚至出现错误。其次是由于水准仪法测量周期长,导致其无法进行多次重复测量、长时间监测。如果要获得准确、令人满意的测量结果需要进行多次测量,则测量和观察消耗的时间过长长,劳动强度大过大,因而只能用于短期测量。而且使用这种方法监测需要专业的测绘人员安装测量仪器及进行后期测量计算,需要的劳动成本十分高。
(2)GPS监测法
GPS系统是新一代全球卫星导航定位系统,可全 天 候24小时不间断地提供精确定 位和 导 航。近年来,基于GPS的精密定位技术在大翼桥上的应用已成为专家和科学家关注的研究热点。GPS空间定位功能可用于通过监控所监控点的三维运动来连续监控天气状况。 GPS监控还具有以下功能。GPS观测区分从卫星和基站发射的RTK差分信号,使观测相对独立;GPS可实现高定位速度,监控灵活性和实时监控;无人值守数据库存储系统及相关数据接收和数据处理分析软件可以将高级自动化结合起来。当然,GPS方法也有一些缺点。高成本的测量使其通常只适用于监测大型和大型桥梁。而且GPS受气候和遮挡物影响大,在气候比较恶劣、卫星信号丢失的地方,比如大雨大雾或结构上方有遮挡物或卫星信号被不明因素干扰等情况,监测精度会有所降低甚至无法测量。
(3)激光和视频图像法
该方法同样是间接测量方法。该测算方法通过计算两个激光点的中点的相对变化来反映桥的垂直偏转和水平位移。该系统具有低成本测量,高精度和连续在线检查的可能性。系统原理:该方法的光接收器是具有CCD相机的物体,其收集由激光投射到物体的图像。然后计算机将计算图像以获得桥的偏差。
该方法如今广泛用于监测各种类型的中小桥的线形形变,得到了众多专家和研究人员的高度评价,并带来了成功的研究成果。但该方法具有一些不可忽视的缺点,并且在部分条件下不能使用,存在测量的局限性。总的来说存在以下问题,覆盖范围的限制:这种方法一般适用于中小型桥梁;雨天和雾天等能见度较低、大气湍流较大的天气中会影响激光的投射位置,导致测量存在较大的误差。限制:由于目标的物理尺寸有限,激光可以投射到目标之外。这会导致丢失测量数据并影响系统的稳定性和可靠性。由于图 像位移和实 际位移之间不是相同的,需要通过校准得到两者之间的比例关系。该设备的图示如图1.2.2所示。
 图1.2.2 激光和视频图像法
图1.2.2 激光和视频图像法
这种方法广泛适用于中小型的工程结构监测,在这方面的研究也取得了十分丰硕的成果,在专家学者间饱受推崇。但是激光测量法也有许多缺点不可避免。由于这种测量方法对机械环境的搭建有局限性,也不易安装,安装成本与所测大小有关,因而适用于中小型工程结构,但是不适用于大型的桥梁等工程结构,适用的范围局限性很大;在大雨大雾环境下激光会受到湍流影响,使得所测数据偏差过大,得到的测量结果误差超过可承受范围;激光靶标是有大小限制的,如果激光没有投射到相应的靶标上面会导致数据的丢失,也即是量程有限导致的测量数据不准确。使系统的稳定性和可靠性存在一定隐患。
基于光纤惯性导航系统的工程线形测量的先进性主要有以下几点:光纤惯性导航设备具有体积小、精度高、安装方便且量程可变等优点;可以实时监控、多次重复测量,提高了测量速度和效率,减少了人力物力的投入,节省了测量时间和测量周期。可以对工程的静态形变和动态形变进行测量,可存储后对数据进行精密分析也可使用远程控制进行实时监测,应用领域多样、使用方法十分灵活。
1.3 本文的主要工作
本课题主要目的为设计基于STM32单片机的数据融合系统,实现数据采集和各传感器数据融合,完成输出频率各不相同的各传感器数据的实时接收、整合和存储,用以实现海南站屋顶形变监测。整合各类传感器数据本课题的线形系统主要模块为组合惯导模块,此外还包括倾角传感器、里程计等各类传感器。本课题将多种传感器的数据融合,与之前的单传感器或少量传感器相比测量精度更高误差更小,运用混合式信息融合系统,具有较好的适应能力,稳定性强。
第一章主要介绍了以下几个方面:1、光纤陀螺仪及其惯导系统的发展和如今的研究进程以及国内外的研究进展比较;2、线形系统以及大型工程形变测量的发展和现今的研究进展、各种用于线形测量的测量方法的优劣对比,以及光纤惯导系统在这一研究方向的优势。
第二章主要对传感器选型进行阐述,分析了各传感器的工作原理和数据类型以及数据格式和工作方式,为第三章、第五章中数据处理存储方案的选择及数据接收结果的分析提供一定的理论依据和数据分析基础。
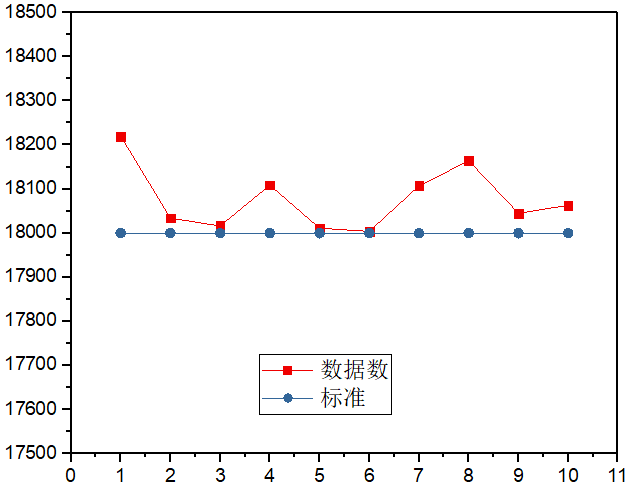
第三章的主要工作是比较分析不同的数据接收方案是否有丢包现象并不断完善方案、确定最终实施方案,为第四章、第五章硬件软件设计和数据分析打下基础。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: