喂饭机器人控制系统设计毕业论文
2020-02-13 22:04:58
摘 要
摘要:机械手技术应用于各类工业产业,随着机械手技术的发展和人们物质生活的需要,机械手不再限于工业方面的应用,而是开始深入人们的生活当中。本文主要叙述了应用于生活服务方面的喂饭机器人机械手的控制系统设计过程,介绍了机械手的控制系统的设计方法及理论。
机械手设及多个科学领域,例如机械设计技术、自动控制技术、计算机技术、电子学、传感器等。本设计以AT89S51单片机为核心,超声波传感器进行位形测定并反馈给单片机,单片机相应产生PWM波达到控制R/C伺服电机的启停、方向及角位移,完成喂饭机器人的使用需求和控制需求。
关键词:机械手;AT89S51单片机;PWM技术;机电控制;自动化
Abstract
Abstract: Manipulator technology is applied to various industrial industries. With the development of manipulator technology and the needs of people#39;s material life, robots are no longer limited to industrial applications, but begin to penetrate people#39;s lives. This paper mainly describes the design process of the control system of the feeding robot manipulator applied to the life service, and introduces the design method and theory of the control system of the manipulator.
The robot is designed in a number of scientific fields, such as mechanical design technology, automatic control technology, computer technology, electronics, and sensors. The design takes the AT89S51 single-chip microcomputer as the core, the ultrasonic sensor performs the shape measurement and feeds back to the single-chip microcomputer, and the single-chip microcomputer generates the PWM wave to control the start-stop, direction and angular displacement of the R/C servo motor, and completes the use requirements and control requirements of the feeding robot. .
Keywords: robot; AT89S51 single chip microcomputer; PWM technology; electromechanical control; automation
目 录
第一章 绪论 1
1.1 概述 1
1.2 国内研究外现状 2
1.3 总体设计方案 3
1.3.1 设计要求 3
1.3.2 设计思路 3
第二章 硬件设计 5
2.1 机械手总体结构 5
2.2 cpu 6
2.2.1 cpu选型 6
2.2.2 AT89S51单片机 6
2.3 传动-执行机构 8
2.3.1电机选型 8
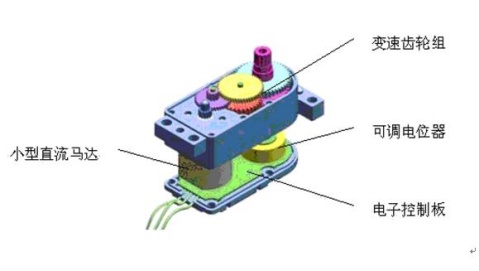
2.3.2 舵机 10
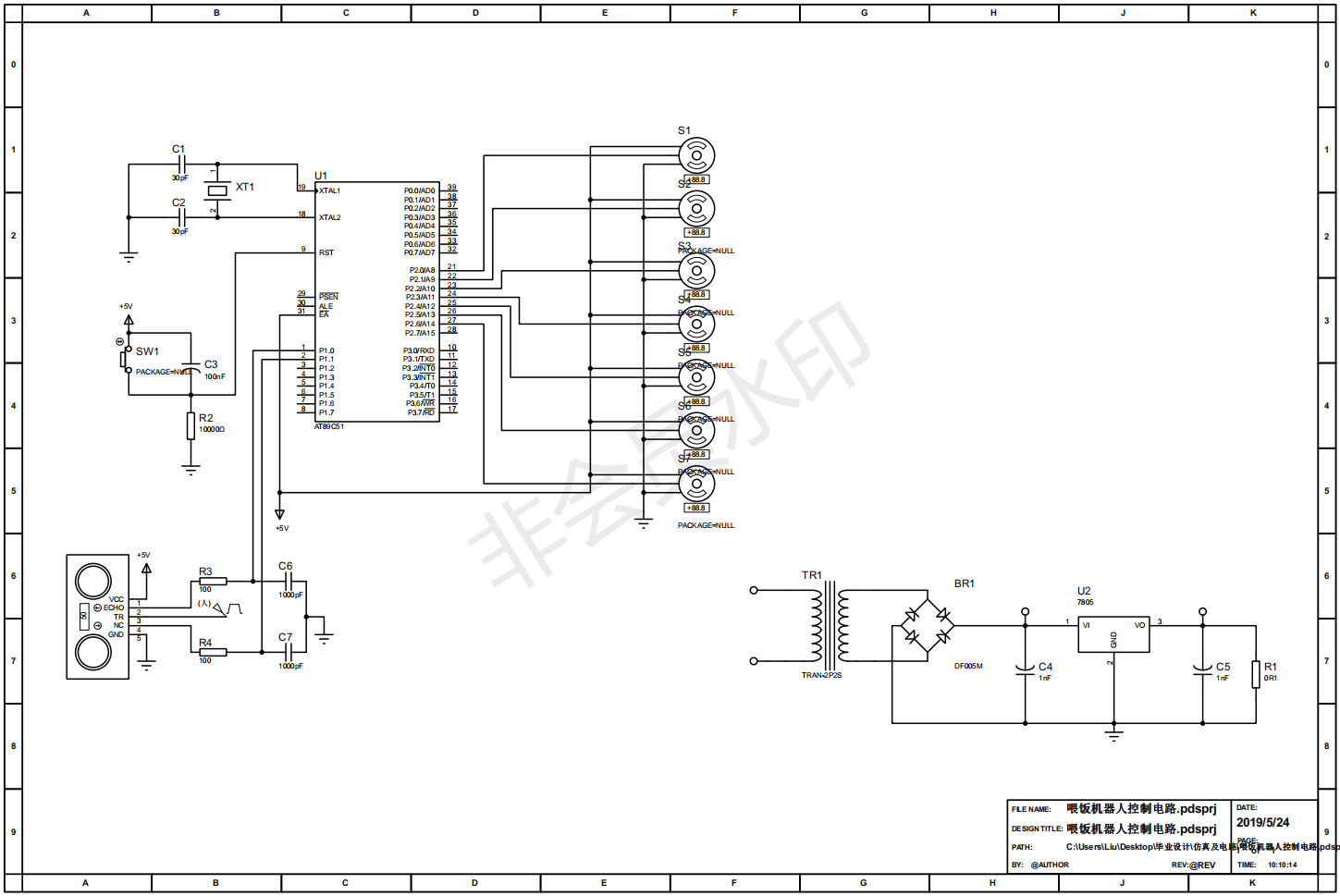
2.4 总体电路 12
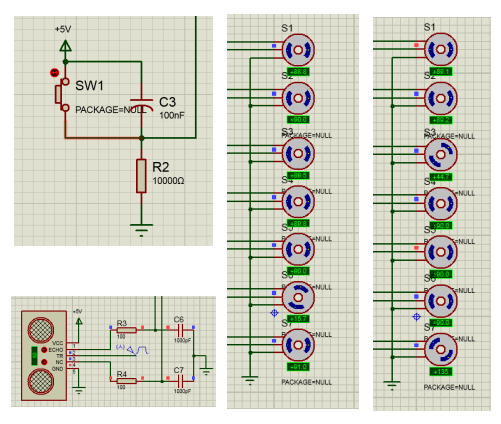
2.5 单片机电路 12
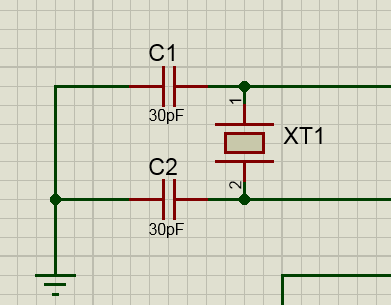
2.5.1 晶振电路 12
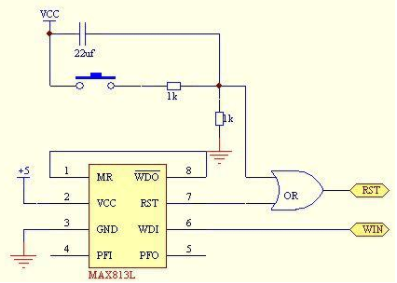
2.5.2 看门狗定时器 13
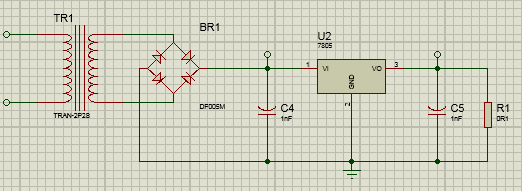
2.6 7805稳压电路 13
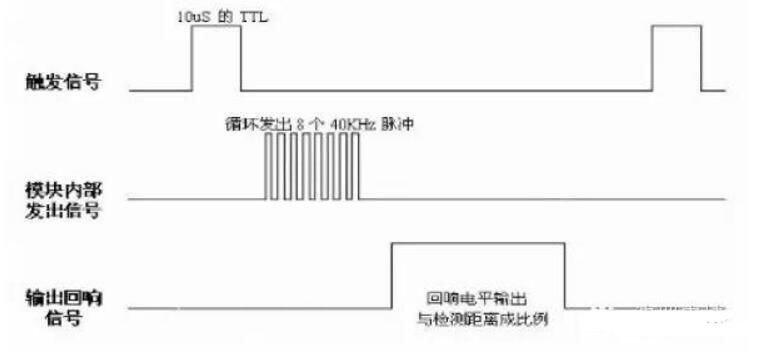
2.7 超声波测距模块 14
2.7.1 选型 14
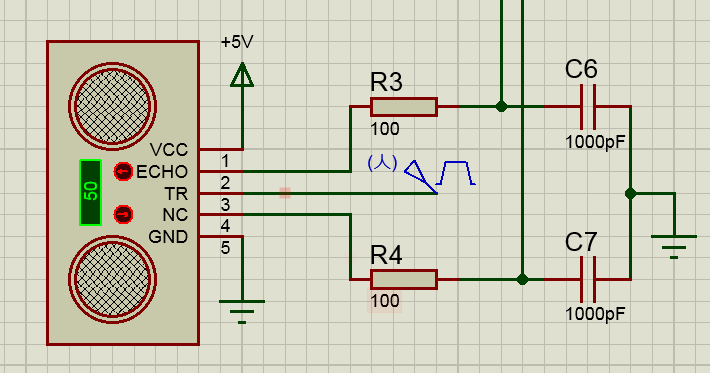
2.7.2 超声波测距模块电路 16
第三章 程序编辑 17
3.1汇编语言 17
3.2 Keil mu;Vision5 17
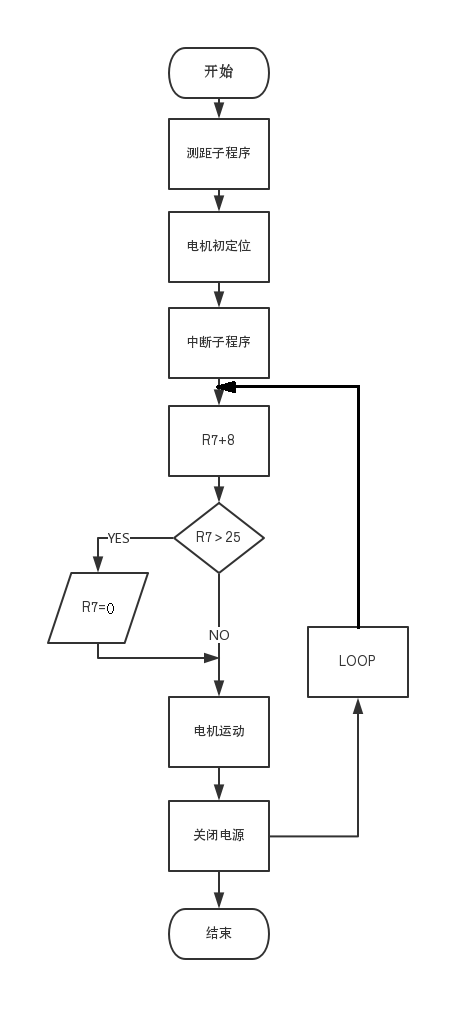
3.3 主程序 17
3.4 子程序 18
3.4.1 延时子程序 18
3.4.2 中断子程序 19
3.4.3测距子程序 19
第四章 仿真模拟 21
4.1 Proteus 21
4.2 仿真过程 21
结论 23
参考文献 24
附录一 单片机程序 25
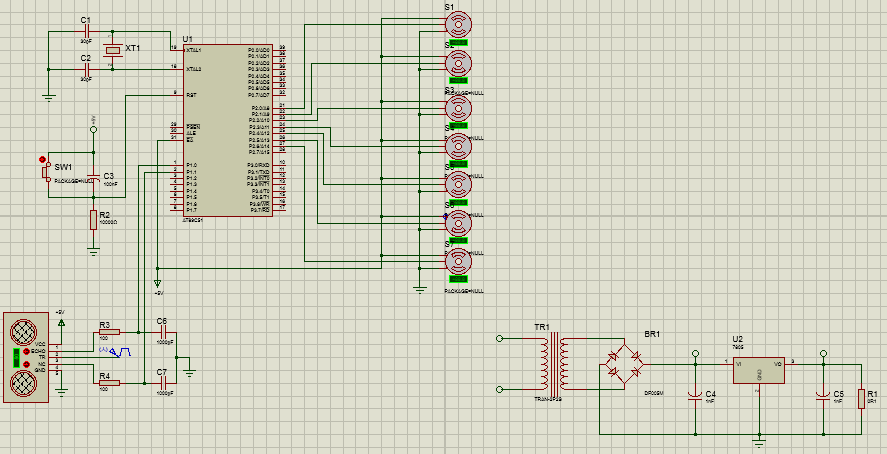
附录二 电路原理图 32
致谢 33
第一章 绪论
-
- 概述
随着时代的发展,工业当中机械手应运着自动化、连续化的需求已经越来越被普及,随着人命的物质需求和技术的革新发展,机械手也一步步在人们生活当中开始出演各类角色。机器人越来越易于被设计生产,已经不在满足于仅仅应用于工厂流水线上,而是开始逐步进入人们的日常生活当中,于是各类家居型服务机器人开始应运而生。中国拥有世界上最多的人口,在其基数下因此也面临着最多的残疾人、老年人、重症患者,他们需要他人花费大量的时间精力来看护他们。而本文所设计的正是针对于现今我国老年人、病重患者、残疾人人口多这一现状,为了减轻人工看护的时间、精力的机械手。机械手虽然通常只拥有单一的简单的抓取、搬取能力,但因为其结构简单、低成本,对单一任务有极强适应性,便成为了看护机器人中的优质选择,但因为现下主流的喂饭机器人成本高昂,对于国内大多数养老院来说过于昂贵,因此市面上急需一款低成本的喂饭机器人,因此本次设计的首要任务便是降低成本。
通常来说,机械手是由控制系统进行信息交互、发出控制信号,传动-执行机构进行信号处理及传动,执行机构执行来完成机械手的工作,如图1-1所示。
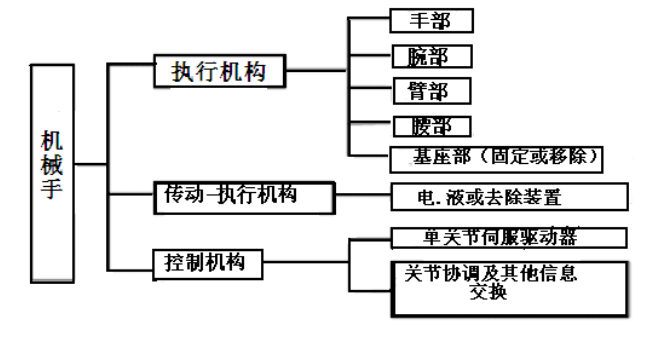 图1-1 机械手结构组成
图1-1 机械手结构组成
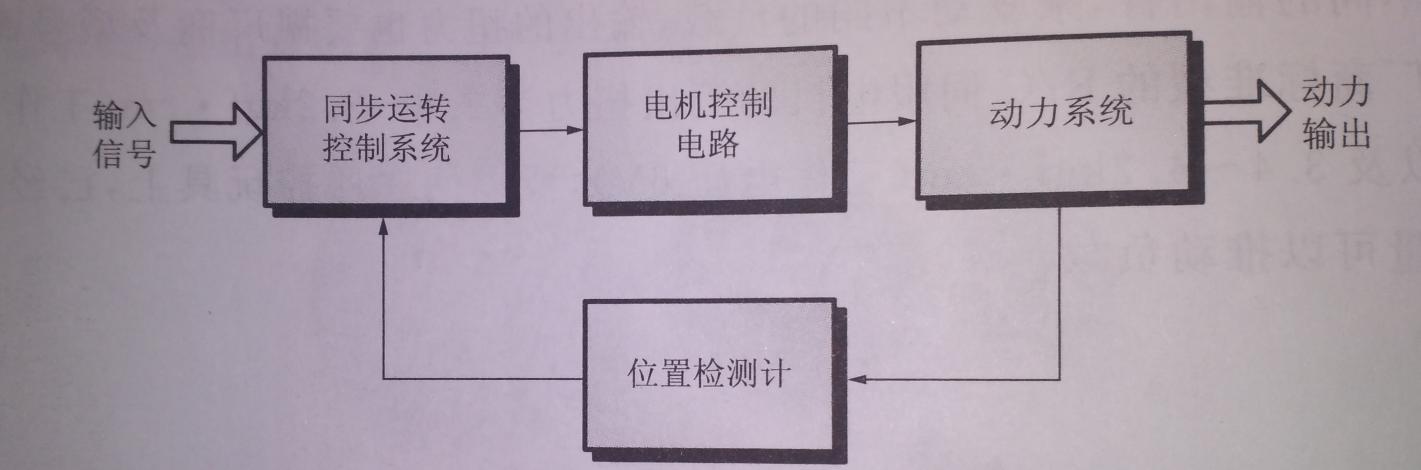
但是由于新技术的出现和人工智能的发展,现今机械手已经拥有了更加智能的控制系统,即以各类传感器比如红外线传感器、压力传感器等为核心的反馈机制,这使得机械手拥有更加独立、智能、自动化的控制系统,各类传感器成为了机械手的“口眼耳鼻”。该反馈机制的关系如下所示:
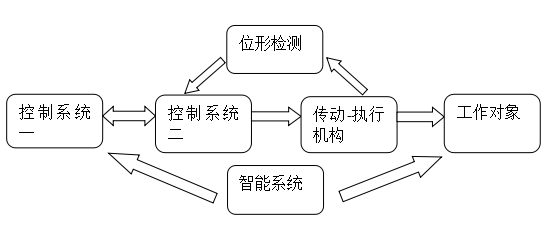
图1-2机械手智能系统
本次设计主要分为三个方面:机械手控制系统、视觉识别系统和机械手结构设计。我所负责的是控制系统设计,主要应用了c51单片机、超声波测距传感器、R/C伺服电机和PWM波技术,即以超声波传感器测距并向单片机反馈,然后单片机产生PWM波控制伺服电机完成机械手传动、控制。
1.2 国内外研究现状
作为拥有机器人王国美称的日本,各种各样的有趣的机器人在此诞生,而喂饭机器人最初也同样在此出生。早在2002年5月,世界上第一台喂饭机器人MY SPOON便在日本的西科姆公司手下被设计、制作出来,当它步入市场时风靡一时,十分受到追捧,同时被众多国家进口使用。而在2015年的“自治体综合展览会”上,喂饭机器人MY SPOON被带来展出,受到参展观众的使试用。其突出的特点是MY SPOON的设计和操作方法据有极高的人性化,使用者的操作仅限于操作一下拉杆,MY SPOON就会自动使用它的勺子从四个小餐盘中挖取食物,然后自动寻找人的嘴巴并将食物送达,让人轻松享受。正是这些体贴人心的便利操作,使得MY SPOON在当年自治体综合展览会上,力压群雄,从众多服务型机器人中脱颖而出,拔得头筹。另一方面,在2016年,有一家美国公司desin,同样推出了一款叫做Obi的喂饭机器人。与MY SPOON相同,它也拥有四个餐盘与一个负责喂饭的机械手臂,但它还与MY SPOON有一些不同之处,它只需要操作蓝绿两个按钮,通过使用蓝色从而改变机械手选取的菜品再点击绿色按钮命令机械手为主人喂饭。而Obi的记忆功能则是它最大的亮点,你只需要在第一次使用时将机械臂定一次位,Obi便会记录下来并反复使用。
由于喂饭机器人的目的是降低人工看管导致的高昂费用,而MY SPOON、Obi却远超好几万或数十万,无法达到降低费用的目的,这使得喂饭机器人未能在大众当中普及开来,也没有展现出其应有的价值;另一方面,从技术层面出发,喂饭机器人不应当仅仅局限于充当一个能自动喂饭的勺子,更应当是一种陪伴使用者,为使用者减轻孤寂感、改善使用者心情的心灵之友。因此设计喂饭机器人不仅要实现它的喂饭功能,还应当具由人性化的智能交互系统和以一定的沟通能力。据统计,2012年全球个人/家用服务机器人销售量约为300万台,与2011年相比同比增长20%,销售额超过12亿美元;2014年全球个人/家用服务机器人销量约为470万台,与2013年相比同比增长17.50%,销售额超过22亿美元,个人/家用服务机器人正在逐年普及开来,使用人数越来越多。就结论而言,人们对喂饭机器人的需求不仅仅是简单的喂饭功能,更应当拥有舒缓使用者心情、与其沟通交流的能力,未来的商业空间和市场前景宽广无比,只要能改善现在成本和技术的情况,相信它前景可期。
1.3 总体设计方案
1.3.1 设计要求
总体设计如下图:
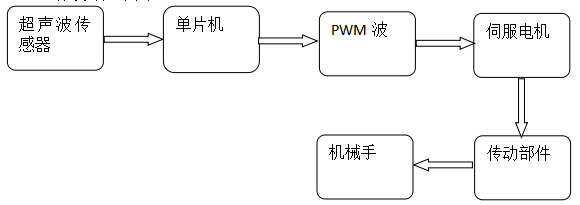 图1-3总体设计框图
图1-3总体设计框图
老人或病人等使用者坐下或躺下后机械手能完成对使用者的定位,自动进行对不同食物的切换以及对使用者的喂食。要求机械手运行路径合理,能够通过传感器装置进行位形定位,整个过程无人操作。
1.3.2 设计思路
CPU
CPU有两种选用方向,一是单片机控制,二是PLC控制。
定位传感器
传感器种类较多,但价格便宜、适用于短程定位的一般为红外线或超声波传感器,选择时应当注意被测对象为人类,被测距离约为10-40cm,控制核心为单片机处理能力有限。
传动-执行机构
传动机构数量多、种类杂,链条传动、齿轮传动十分常见,其他还有丝杆、齿条等传动方式,而执行机构考虑到智能化机电控制,则推荐使用数字舵机或步进电机。[9]由于对该机械手的使用场合考量,传动-执行机构应当有以下特点:
(1)重量轻、体积小、结构紧凑,在大多数场合能够简便放置
(2)回差小、空行程小,能够有较高的控制精度
(3)成本低廉、使用寿命长,便于维护
第二章 硬件设计
2.1 机械手总体结构
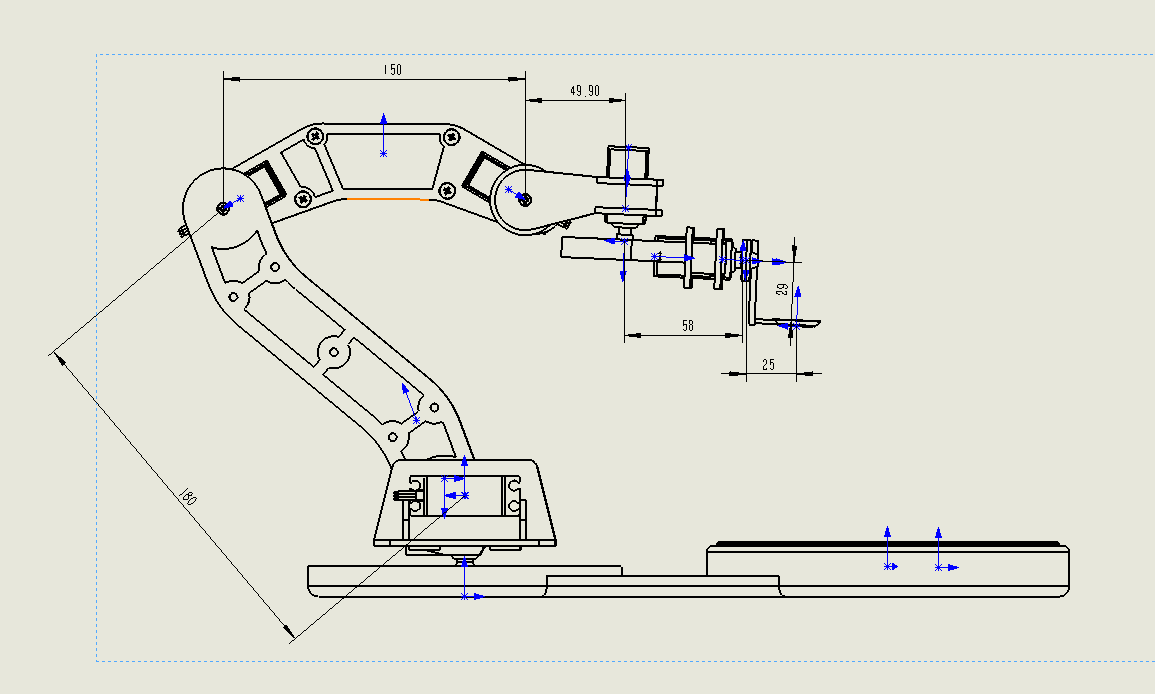 由于本次设计并没有给出明确的外形要求和工作场合,因此喂饭机器人的尺寸也就没有详细的尺寸要求,出于对使用者的方便考量机械手手臂长度依次为大臂180mm、小臂150mm、手腕50mm 50mm,勺子部分长25mm,高25mm。
由于本次设计并没有给出明确的外形要求和工作场合,因此喂饭机器人的尺寸也就没有详细的尺寸要求,出于对使用者的方便考量机械手手臂长度依次为大臂180mm、小臂150mm、手腕50mm 50mm,勺子部分长25mm,高25mm。
图2-1机械手结构尺寸
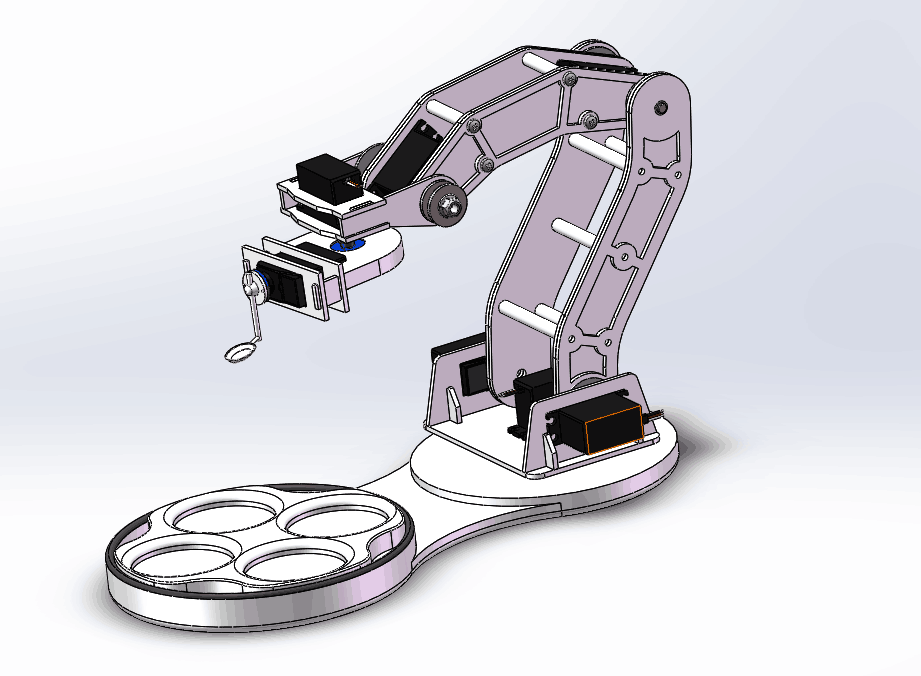
图2-2机械手3D建模
本机械手一共有7个自由度,分别在基座与大臂处两个,大臂与小臂处一个、小臂与手腕处一个、手腕自身一个、勺子一个、餐盘一个。机械手七个自由度全部由R/C伺服电机控制,通过齿轮传动控制各个关节转动。电机S1控制大臂Z轴旋转、S2控制Y轴,电机S3控制小臂Y轴,S4控制机械手手腕Y轴,S5控制Z轴,S6控制勺子,S7控制餐盘。
2.2 cpu
2.2.1 cpu选型
PLC
PLC,Programmable Logic Controller,可编译逻辑控制器,这是专门为工业生产所诞生的电子装置,一种以数字运算操作为核心,拥有可编程的内部储存器,对于定时、计数、算数操作等基础指令有良好的适性。由于能够执行逻辑运算、顺序控制,可以应用数字、模拟式输出、输入以完成对于大多数机械及生产过程的控制,成为了现今工业控制的核心要素之一。[3]随着计算机、信号处理等高精尖技术的发展,PLC系统扩展了运动控制模块和模拟量处理模块,因此在机械系统的运动、过程控制方面也逐渐产生了关键性作用。
PLC的主要结构有中央处理单元(CPU)、储存器、电源、程序输入装置、输入\输出回路,工作时一共有三个阶段,分别是:输入采样阶段,PLC控制器依次扫描并录入所有输入状态和数据,然后存储至相应的I/O映响区单元中;用户程序执行阶段,PLC控制器自上而下、从左往右依次扫描用户程序(梯形图),并由梯形图中的各触点生成控制路线并进行相应的逻辑运算,执行相应指令;输出刷新阶段,所有电路依照I/O映象区存储的数据被CPU进行输出锁存,然后再驱动电路控制的各个元件,完成PLC系统的输出。
单片机
将微电脑结构中的中央处理单元、内存、输入\输出单元等功能集成到一颗芯片中,该芯片便可称为“单片微电脑”(Single Chip Microcomputer),又称为单片机微控制器,简称单片机。由于其大小仅与一般IC大小相同,所以应用广泛,小到手机、遥控器、大到工厂生产线,都可以应用其中。由于单片机将大多数功能集成在一个芯片中所以使得单片机拥有体积小、功能强、外围电路简单、便宜的优点,能够在恶劣的工作环境下采用使用简便的措施,拥有较高的可靠性和抗干扰性。
本次设计出于机械臂大小及传感器的使用方面考量,选用AT89S51单片机作为本次设计的电路核心。MCS-51系列是美国INTEL公司于1980年推出的产品,编号从8031开始一直到89C51,成熟度和稳定性极高,但仍存在IC芯片的烧写清除必须拔出芯片的问题,因此ATMEL公司推出了AT89S系列,可通过ISP(IN-System Program)接口烧写清除程序。AT89S51为一颗低功率、高效能的8位单片机,工作电压4.0-5.5V,工作频率0-33MHz,其内部程序内存为4KByte,结构为CMOS制成的可编程Flash Memory。
2.2.2 AT89S51单片机
AT89S51单片机基本配置如下:一个8位微处理器,与其他单片机相同;程序储存器拥有4KByte内存,可通过扩展存储器扩展至64KBute;128*8bit内部数据存储器,20H-2FH区段可单独独位寻址;一共拥有5个中断源(INT0、INT1、T0、T1及串行口中断);全双工UART串行通道,可进行扩展并行I/O口;一组看门狗定时器;2个16bit的计时/计数器;32只输入/输出脚,共4个Prot。
AT89S51引脚及其功能如下:
- VCC:电源输入引脚,工作电压4.0-5.5V。
- GND:接地端。
- VDD:42PDIP的电源输入引脚。
- PWR VDD:由此输入的电压,专门供给I/O引脚使用(42PDIP)。
- PWR GND:PWR VDD的接地端
- P0.0-0.7:第32-39脚,8位的输入/输出引脚输出的结构为开楼结构,内部没有上拉电阻,作为输出引脚时需在外部加上4.7-10KOmega;的上拉电阻,每个引脚可推动8个TTL逻辑门。
- P1.0-1.7:第1-8脚,8位输入/输出引脚,内部含有上拉电阻,Prot1可直接输出Hi/Lo信号,每个引脚可推动4个TTL逻辑门,其特殊用途如下:
- P1.5:MOSI(Input),串行数据输出脚
- P1.6:MOSI(Output),串行数据输出脚
- P1.7:SCK(Serial Clock),串行数据移位脉冲
- P2.0-2.7:第21-28脚,8位输入/输出引脚,内部含有上拉电阻,每个引脚可推动4个TTL逻辑门。
- P3.0-3.7:第10-17脚,8位输入/输出引脚,内部含有上拉电阻,每个引脚可推动4个TTL逻辑门,其特殊用途如下:
- P3.0:RXD,串行输入脚
- P3.1:TXD,串行输出脚
- P3.2:INT0,外部中断0的输入脚
- P3.3:INT1,外部中断1的输入脚
- P3.4:T0,计数器0的信号输入脚
- P3.5:T1,计数器1的信号输入脚
- P3.6:WR,外部数据储存器“写入”的信号输出脚
- P3.7:RD,外部数据储存器“读出”的信号输出脚
- RST:第9脚,复位输入引脚,给予该引脚“Hi”信号持续两个机械周期以上可是AT89S51复位。
- ALE/PROG:第30脚,地址锁存时能输出引脚/程序写入卖场输入引脚。
- PREN:第29脚,外部程序存储器使能输出脚。
- EA/VPP:第31脚,内部程序存储器存取使能。
- XTAL1:第18脚,脉冲输入脚。
-
 XTAL2:第19脚,脉冲输出脚。
XTAL2:第19脚,脉冲输出脚。
图2-3 AT89S51引脚图
图2-4 AT89S51芯片
2.3 传动-执行机构
2.3.1电机选型
步进电机
步进电机是一种依照电脉冲信号来确自身的角位移或线位移的电机,其控制类型是开环控制,在现代数字程序控制系统中常作为主要执行元件被使用,适用场合极为宽泛。在电机没有超载时,电机受到脉冲信号的频率和次数控制,能够稳定控制转速和停止位置而不受到负载变化的影响,每当一个脉冲信号输入步进驱动器,步进电机便按固定的方向旋转固定的角度(步距角)。由于步进电机转动时按照每收到一个脉冲信号只转动一个步距角,依次逐步转动,因此称为步进电机。控制输入步进电机的脉冲信号的个数便能够精准地将旋转角度定位;同时可以通过提高、降低输入的脉冲频率来提高或降低步进电机转动的速度和加速度,从而达到调速的目的。
步进电机的使用场合大多为有精确定位需求、第转速的工作状况,例如:纺织设备、机器人领域、包装机等,特别适合要求运行平稳、响应快、高输出扭矩的应用场合,由于没有电刷电机寿命长、产生的噪音小。综合来看,步进电机所拥有的惯量低、定位可控稳定、无不会累积误差、控制方式简便等特点,使其成为机电一体化产品中的中流砥柱。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: