基于点云的零部件识别与定位毕业论文
2020-04-13 11:08:38
摘 要
由于如今科学技术的发展,机器生产逐渐取代人工工作。而机器在使用过程由于长期工作和磨损将会出现很多问题。因此机器用品总在不停的更新中,而一些废弃的机械用品中常常有许多仍能使用的机械零部件和贵重金属。因此对废弃机器中仍可继续循环利用的金属或零部件的识别拆卸工作显得尤其重要。但由于零部件的种类不同,同时对于基于基于机器视觉的零部件定位方面的算法研究还不够。因此针对工业自动化拆卸过程中典型零部件的识别问题,研究基于深度图像和点云特征的典型零件识别方法。研究一种采用八邻域栅格深度差(8N-DD)筛选点云数据边缘的算法,该算法首先使用八邻域深度差分算法从滤波点云数据中过滤和提取点云边缘,然后对提取出来的点云边缘分割点云数据,最后,通过随机抽样一致算法对分割提取后的点云数据进行表征判别以识别元件。
论文主要研究了提出的八邻域深度差算法对于典型零部件识别的准确率,该算法对具有规则边角的零部件识别率高达95%以上。
研究结果表明:通过仿真实验验证了该方法能够快速识别典型组件的点云边缘。并且通过随机抽样一致算法和元件自身属性可以确定元件的类别,再通过KNN算法定位操作可以准确判别零部件的位置。
本文的特色:提出了八邻域深度差算法。这种算法可以对点云边缘进行有效提取从而达到对零部件精确识别的效果。
关键词:点云特征;八邻域;边缘提取;RANSAC算法;零部件识别
Abstract
With the development of science and technology, machine production has gradually replaced manual work. There will be many problems when the machine is in use due to long-term work and wear. As a result, machinery supplies are constantly being updated, and some of the abandoned machinery supplies often have many mechanical parts and precious metals that can still be used. Therefore, it is especially important to identify and disassemble metal or parts that can still be recycled in waste machines. However, due to the different types of parts, it is not enough to study the algorithm of parts location based on machine vision. Therefore, a typical part recognition method based on depth image and point cloud feature is studied to identify typical parts in the process of industrial automation disassembly. Studies a kind of eight neighborhood grid depth difference (8 n - DD) filtering algorithm on the edge of point cloud data, the algorithm firstly USES eight neighborhood depth difference algorithm from the filter in the point cloud data filtering and extracting on the edge of the point cloud, and then to extract edge point cloud segmentation of point cloud data, finally, after random sampling consensus algorithm for segmentation of point cloud data characterizing the criterion to identify the components.
This paper mainly studies the accuracy of the proposed oc-neighborhood depth difference algorithm for the recognition of typical parts, and the algorithm has a recognition rate of more than 95% for parts with regular side angles.
The simulation results show that this method can quickly identify the point cloud edge of typical components. Moreover, the category of components can be determined by the random sampling consistency algorithm and the element's own attributes, and the location of components can be accurately determined by KNN algorithm positioning operation.
The characteristic of this paper is to propose an octant depth difference algorithm. This algorithm can effectively extract the edge of point cloud and achieve the effect of accurate identification of parts.
Key Words:Point cloud characteristics; Eight neighborhood; Edge extraction; RANSAC algorithm.;Parts identification;
目录
摘 要 I
Abstract II
目录 I
第1章 绪论 1
1.1 研究的目的及意义 1
1.2机器视觉的研究现状 1
1.3本课题的主要研究内容 3
第二章 数据获取原理及实现 5
2.1开发工具 5
2.1.1 kinect传感器 5
2.1.2 MATLAB软件 7
2.2点云优化与采集 7
2.2.1点云数据 7
2.2.2数据获取 9
2.2.3数据优化 10
2.3本章小结 11
识别与定位算法原理及实现 12
3.1点云边缘提取 12
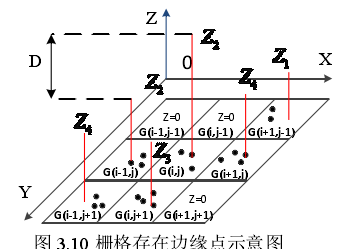
3.1.1八邻域深度差算法 12
3.1.2实验结果 15
3.2点云边缘的分割 16
3.3零部件识别 17
3.3.1 RANSAC算法 17
3.3.2特征识别 18
3.3.3识别步骤 19
3.3.4算法对比 20
3.4零部件定位 20
3.4.1 K-邻近算法 20
3.4.2定位步骤 21
3.5实验结果 22
3.6 测试分析 23
3.7本章小结 24
第四章 总结和展望 25
4.1论文工作总结 25
4.1.1论文总结 25
4.1.2研究工作展望 26
4.2论文意义 27
参考文献 28
致谢 30
第1章 绪论
1.1 研究的目的及意义
我们现在处于工业化和机械化时代,高精度的机器操作逐步取代人类简单的手工操作。在机器不断推陈出新的过程中,人们对机器的制作精度要求也越来越高,且由于设备不断的更新,其可以利用的寿命也十分有限。然而一个精良的机器设备成本不容小觑,因此人们在应对这种问题时,提出了对废旧机械中仍具有较高价值的元件或金属进行回收再利用的方法来减少浪费。自动化识别并拆卸特定零部件成为了一个人们亟待解决的问题。其中机器视觉是实现自动化拆卸的研究内容之一,是实现高价值零部件回收的重要核心技术。
机器视觉是使用机器而不是人眼来进行评估和判断。首先,使用图像传感器将捕获的目标转换成图像信号,然后将其传输到专用图像分析处理系统,并且基于像素大小,亮度范围,颜色范围和其他性质将其转换为数字信号来分析。图像系统对这些信号执行各种操作以提取目标的特征,例如: 种类、长度、个数、位置等; 最后,根据预设的容差和其他条件输出结果,例如: 类别,角度,偏移量,编号,通过/失败,是/否等与一般意义上的图像处理系统相比,机器视觉的特点是机器自动化,非主观性,非接触性和高精确率。机器视觉同时也强调准确性和速度,以及在跨不同工业现场背景中的操作的可行性。 机器视觉非常适合批量生产中的测量,检测和识别。机器视觉和如下3个领域密切相关:
(1)图像处理:从已有图像产生一张新图像。(噪声抑制、去模糊、边缘增强,产生新图像);
(2)模式分类:一组用来表示物体属性的给定数据。识别一个物体,就是将其归为一类。
(3)场景分析:将从图像中获取的简单描述转化成一个更加复杂的描述。
基于图像的机器视觉是目前常用的部分识别方法。 已应用于零件的识别和拆卸。 由于其方便实用的优势,在三维重构、物体跟踪和姿态识别等领域被广泛应用。Kinect系统可以获取视场中物体的深度图像和利用Kinect for Windows SDK 工具包将深度图像转变为点云数据。
1.2机器视觉的研究现状
使用过的机器产品的部件实际上是机器视觉识别的目标对象。 国内外基于机器视觉的零件识别主要是基于特征的图像识别,不同的地方主要采用不同的识
别特征。 例如,有特征部分或轮廓曲线,不变矩和信息熵。结构识别模型的结构不尽相同,采用的识别方式也有差异。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: