基于Creo平台的MQ4035门机运行机构设计毕业论文
2020-04-09 15:20:11
摘 要
近年来随着我国经济水平的不断提高和国际贸易的日益繁荣,在港口、码头等物流集聚地,门座起重机是最常见的装卸机械之一,多用在港口集装箱、木材以及散货的装卸、搬运和堆码作业。港口的工作效率已越来越引起人们的重视,提高港口效率其中就需要提高门机的作业效率,设计一款适合港口使用的,高效率的门座起重机,对于港口装卸的速度乃至运输业的发展都是非常有意义的。
本文以MQ4035港口门座起重机为例,作出了门座起重机的总体设计计算,与此同时对其运行机构进行简要参数设计计算,再在creo软件中作出运行机构设计的三维设计模型,完成虚拟装配及导出重要零件工程图,最后对门座起重机的各项参数进行校验,保证满足起重机相应要求。
关键词:港口门座起重机;运行机构;Creo
Abstract
In recent years, with the continuous improvement of China's economic level and the increasing prosperity of international trade, the portal crane is one of the most common handling machinery in port and wharf. It is used in port container, wood and bulk cargo handling, handling and stacking operations. The efficiency of the port has attracted more and more attention. To improve the efficiency of the port, it is necessary to improve the efficiency of the machine. The design of a high efficiency portal crane suitable for port use is very intentional for the speed of port handling and the development of the transportation industry.
In this paper, Taking the MQ4035 port gantry crane as an example, the overall design calculation of the portal crane is made. At the same time, the brief parameter design and calculation of its operating mechanism are carried out, and then the 3D design model of the operating mechanism is made in the Creo software. The virtual assembly and the export of the heavy part engineering drawing are completed. The parameters are checked to ensure that all requirements are met.
Key Words:Port gantry crane; traveling mechanism; Creo
目 录
第1章 绪论 1
1.1 课题的研究目的和发展现状 1
1.2 课题研究的内容 2
第2章 港口MQ4035门座起重机总体设计 3
2.1 性能参数 3
2.2 刚性四连杆组合臂架的设计 4
2.3 货物水平位移高度差和未平衡力矩最大值 5

2.4 杠杆活对重式臂架自重平衡系统设计 6
第3章 运行机构设计及计算 8
3.1 概述 8
3.2 运行机构总体方案 8
3.3 运行支承装置的设计 8
3.3.1 均衡装置 8
3.3.2 车轮 8
3.3.3 轨道选型 10
3.4 运行驱动装置的设计 10
3.4.1 计算稳态运行阻力 10
3.4.2 电动机选型 11
3.4.3 减速器选型 15
3.4.4 制动器选型 17
3.4.5 打滑验算 19
第4章 运行机构的三维建模 21
4.1 Creo软件简介 21
4.2 运行机构建模 21
4.3 导出工程图 23
第5章 均衡梁的强度检验 24
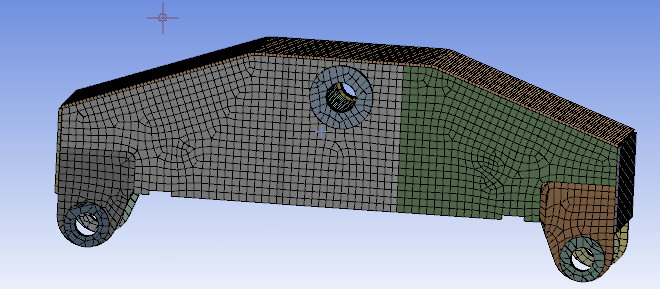
5.1 模型导入过程 24
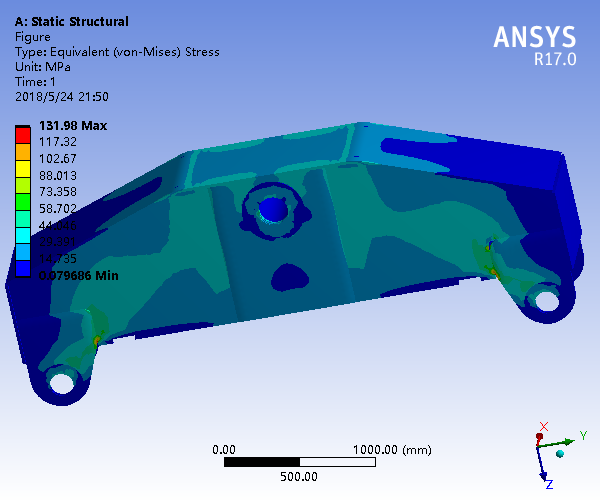
5.2 受力分析过程 24
第6章 环境影响及经济性分析 29
6.1 环境影响分析 29
6.2 经济性分析 29
第7章 全文总结 30
参考文献 31
致 谢 33
第1章 绪论
1.1 课题的研究目的和发展现状
随着我国交通水运事业及对外贸易的发展,国内各类起重机的需求量也随之有了极大的提升。其中门座式起重机在现代化建设中随处可见它的身影,是必不可少的,有着不可代替的作用。起重机广泛应用于港口煤矿、集装箱和各种散货的装卸,是港口必备的机械,由此可见起重机在国内外工业生产中的举足轻重的地位。而门座起重机在诸多种类的起重机中依仗其作业效率高、机动性强作业范围大的优点,故而得到广泛的应用。门座起重机承担了港口很大一部分的货物从货船到堆场的装卸,提高门座起重机的作业效率,对于整个港口物流的发展极为重要。
到目前为止,获得我国国家质量监督检验检疫总局颁发的起重机制造许可证的单位已经有两千多家,如上海振华重工等,整体来看,具有非常强的起重机制造生产的能力,尤其是在小型吨位的起重机的生产和制造方面,我国目前已经处于世界领先的地位。但是在大型吨位起重机设计、制造方面,我们国家跟欧美、日本等发达国家之间还存在一定的差距,大型吨位起重机核心技术掌握在西方国家手里,他们的技术更加成熟,机构更加稳定安全,更重要的是他们生产的门座式起重机为整个行业制订了标准,具有极强的代表性。所以我国还需抓紧这方面的研究来跟进西方国家的大吨位起重机生产的先进技术步伐[1]。
港口门座起重机是港口物流中转中重要的装卸机械设备,其安全运行直接影响到港口企业的生产效率和港口工作人员的安全保障,要保证起重机设备能正常使用和安全运行,需要对起重机各部分进行详细的设计分析。现代工程实际要求起重机在各个实际工况之下(即不同的载荷组合下)都具有较高的工作效率及安全性。为保证起重机使用安全性及生产成本低、外形协调实用的目标,现在我们对门座起重机总体设计提出了更高要求。门座起重机四大机构为起升机构、运行机构、变幅机构和回转机构,门座起重机运行机构又称大车运行机构,作为门座式起重机的四大机构之一,其设计内容尤其重要。
在起重机运行机构的研究方面,早在1997年黄建生在门式起重机运行机构破坏分析与对策一文中对运行机构耳板焊缝易断裂、减速器和车轮组中支承轴承破坏现象提出解决方案,由刚性连接改为柔性连接即可改进运行机构[2]。2004年俞歌在全变频调速的大车运行机构啃轨原因分析一文中,对运行机构啃轨原因及措施进行了详细的分析介绍,指出应该机械、电气联动解决啃轨[3]。2005年艾英君在环行多功能起重机大车运行机构的计算一文中指出要使驱动装置的启动、制动时间同步可采取电器联锁装置使电机运转完全同步[4]。2006年朱德金,王桂梅在门座起重机大车运行机构平衡梁加工工艺的改进一文中指出在以往大车运行机构中大平衡梁往往设计为一整体这一背景下,提出改进的大平衡梁设计方案,简化了设备,为企业生产提供便利[5]。2017年张波在基于SolidWorks的门座起重机大车平衡梁三维参数化设计研究一文中,提出了三维分级参数化思想,实现了三维参数化设计在钢结构设计上的应用,但是由于平衡梁的结构具有特殊性,故仍需探索针对钢结构参数化设计更多的实现方案[6]。
此次有幸对门座起重机的运行机构进行结构设计,通过本次学习设计,可以积累宝贵的设计经验,对本人以后的学习和工作都会有极大的帮助。
1.2 课题研究的内容
本设计以MQ4035门座起重机为设计对象,对MQ4035门座起重机的总体和运行机构进行设计计算。
主要内容包括:
根据题目所给基本性能参数,确定MQ4035门座起重机总体设计方案,包括刚性四连杆组合臂架的设计及其校验和杠杆-活对重平衡设计;
设计计算MQ4035门机的行走机构,包括车轮、轨道、电机、减速器及制动器等选型和校验,最后进行打滑校验;
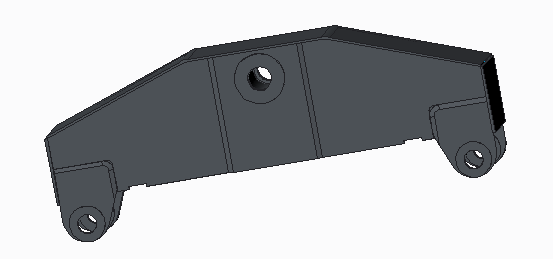
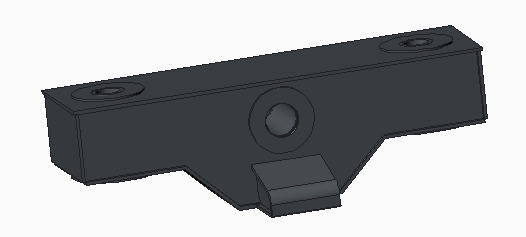
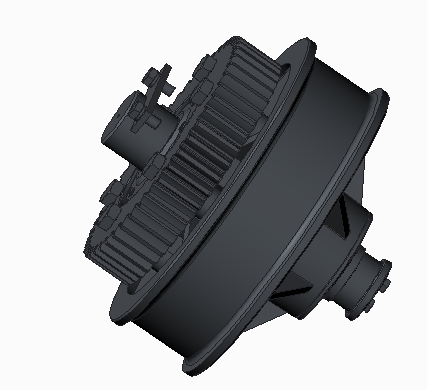
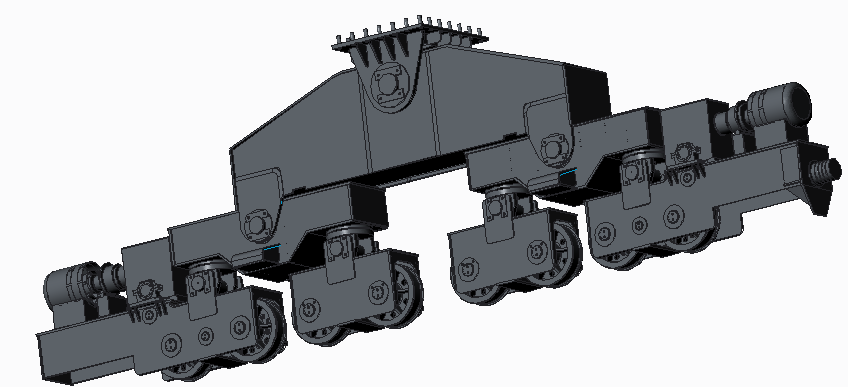
在creo中构建行走机构中主要零部件,包括电机、减速器、制动器和车轮组、均衡梁、车轮等的三维设计模型,然后在creo中完成上述零部件的虚拟装配,接着导出行走机构总图和车轮组、均衡梁等主要零部件工程图,并进行标注和修改。
把模型导入workbench中进行均衡梁的强度校验,作出应力图和位移图,分析均衡梁的强度。
第2章 港口MQ4035门座起重机总体设计
2.1 性能参数
性能参数见表2.1。
表2.1 主要性能参数表
项目名称 | 性能参数 |
起重量 | 40t(吊钩) |
工作幅度 | 最大幅度35m |
最小幅度9.5m | |
起升高度 | 轨上30m |
轨下18m | |
机构工作速度 | 起升机构:30m/min |
变幅机构:45m/min | |
回转机构:1.5r/min | |
运行机构:26m/min | |
机构工作级别 | 起升机构:M8 |
变幅机构:M7 | |
回转机构:M7 | |
运行机构:M4 | |
整机:A8 | |
基距/轨距 | 10.5m/10.5m |
工作状态最大风速 | 20m/s |
非工作状态最大风速 | 55m/s |
工作时最大轮压 | 250kN |
轨道型号 | QU80 |
电源 | 380V 50Hz |
2.2 刚性四连杆组合臂架的设计
我们知道,起重机变幅过程中,如果保证货物在变幅的过程中能过沿着水平线或是近似水平线的方向运行,使得货物的重力势能在变幅的过程中几乎保持不变,可以减小能源消耗,降低成本,提高操作性能。即实现货物水平位移,其方法有绳索补偿和组合臂架补偿,其中本次设计采用的为组合臂架补偿里面的刚性四连杆组合臂架补偿方案[7]。
该设计分为图解法和解析法,这里采用图解法。通过参考郭燕主编的《港口起重机械》一书的刚性四连杆组合臂架设计部分,设计要求起重机最大幅度Rmax=35m,最小幅度Rmin=9.5m,如图 2.1所示,O点距离回转中心线的距离经验取0.5~3m,这里取最大值3m可在满足最大幅度下获得小的臂架长度。滑轮组倍率取mq=1,经验取值 =40°~50°, =155°~170°, =75°~82°, =95°~102°。




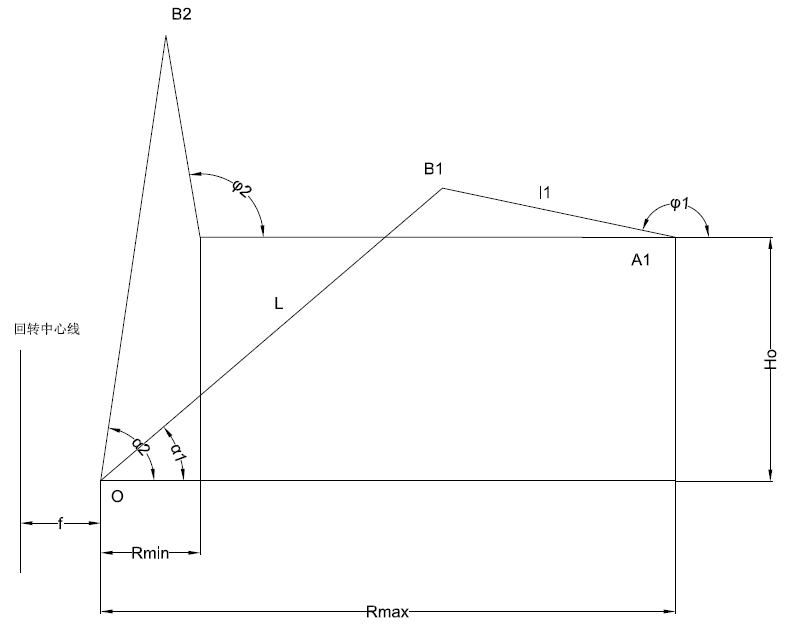
图 2.1
然后反复进行作图,通过取合适的值大致满足条件后,得到如图 2.2的数据,满足总体布置要求。
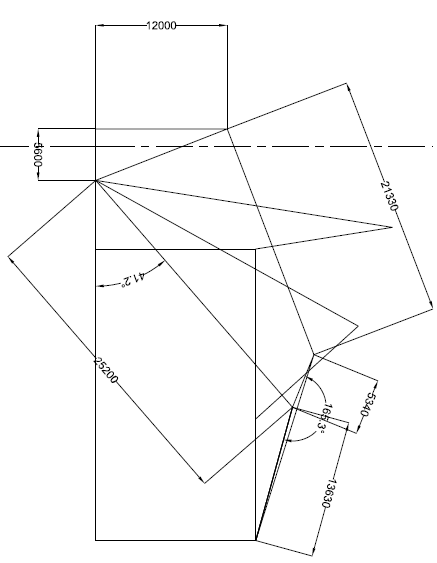
图 2.2
2.3 货物水平位移高度差和未平衡力矩最大值
上一节初步确定了四连杆的尺寸,接下来进行货物水平位移高度差和货物未平衡力矩的校验,作出象鼻梁前端点的实际轨迹曲线,找出其中的最大高度差值,最大高度偏差值应该满足:

(2.1)

接下来进行货物未平衡力矩的校验,作出一系列位置上货物未平衡力矩 变化曲线。

应该满足:
(2.2)

如果不满足上述两个要求,则四连杆尺寸不合格,需要进行修改直到满足要求。
以上是传统的校验方法,计算工作量比较大,可能出现的误差也比较大,而且也很难找到最优的方案,所以本次校验采用的是指导老师郭老师提供的四连杆变幅系统尺寸优化小程序,可以进行多目标优化,在matlab里运行该程序,输入前面设计的四连杆长度的一系列数据,可以自动生成货物水平位移最大高度差和未平衡力矩最大值曲线,如下图 2.3,可看出,货物水平位移最大高度差为0.295m,货物未平衡力矩最大值为150吨·米,均满足要求,经过好几次的修改,上述高度差和未平衡力矩最大值最小,故上述四连杆尺寸满足要求。
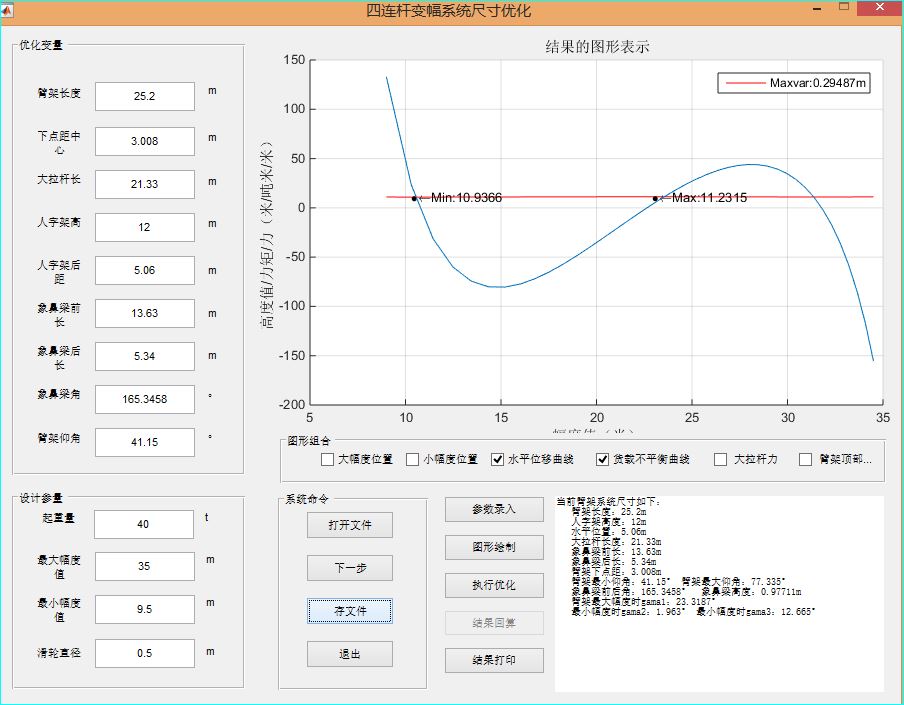
图 2.3
2.4 杠杆活对重式臂架自重平衡系统设计
我们知道,在整个变幅过程,臂架系统的重心会随着变幅的不同幅度而发生变化,这样会增大功耗。我们在设计变幅机构臂架时,需要使臂架系统的合成重心尽量不发生高度变化,那么我们可以通过在臂架后部加一个活对重,使变幅过程中活对重变化的重力势能来抵消臂架系统重力势能的变化,以达到减少功耗的目的。利用杠杆比的合理设计,可以使误差减小到很小程度,来满足实际要求。此次设计采用的是杠杆—活对重平衡法[7]。
按照活对重重力势能的升高(降低)等于臂架自重重心降低(升高)引起的重力势能变化,可计算出活对重的质量约为27吨,接下来根据之前得的平衡系统的杠杆尺寸和活对重重量,对其平衡系统进行检验验算,如果不能满足其平衡性的要求再根据杠杆的尺寸进行调整,知道获得较为合适的对重重量为止。臂架系统各部分重量见下表:
表 2.2 臂架系统各部分重量
臂架(kN) | 象鼻梁(kN) | 大拉杆(kN) | 对重(kN) |
 |  |  |  |
243 | 114.19 | 38.3 | 270 |
计算公式为
(2.3)

式中,
、、 分别表示臂架、象鼻梁、对重的重量;



Rl 、rl 表示由大拉杆重力的一般引起的臂架顶部的作用力和其力臂;
rb,rx,ri,rd,a,b分表示作用力的力臂。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: