气动肌肉无模型自适应控制系统设计开题报告
2020-03-20 23:46:39
1. 研究目的与意义(文献综述)
1.1 研究目的及意义
随着自动化与机械化时代的到来,以气动肌肉(pneumatic artificial muscle,pam)为首的各类气动元件也在不断发展并被人们广泛运用于各类康复机器人之中。气动肌肉结构简单,它内层为橡胶管,外层为纤维编织层,两端有封装和固定装置。在气体压力的作用下,气动肌肉径向膨胀,轴向收缩从而产生收缩力驱动物体运动。然而,由于气动肌肉受到内部摩擦力,橡胶弹力以及端部非理想圆柱特性等的影响,加之气动肌肉部分参数不易获得,种种原因使得气动肌肉的精准模型很难得到建立。另外,由于气动肌肉具有非线性和参数时变性等特性,这也使得传统的控制方法往往不能达到很好的控制效果。因此,寻找更加合适的气动肌肉建模方式以及气动肌肉控制方法成为了亟待解决的问题。
气动肌肉以其重量轻,输出力大,功耗小,柔顺性好和安全性高等特点而备受瞩目。其具有诸多与生物肌肉相似的特点,从而在很多方面可以模仿生物肌肉进行某些动作甚至有可能在某些情况下代替生物肌肉。随着人们的深入研究,气动肌肉必将会有更加广泛的应用,这也为康复医疗和人工智能等领域的进一步发展提供了可能,因此对气动肌肉的控制研究具有很大的理论价值和应用价值。
2. 研究的基本内容与方案
本文以气动肌肉为实验对象,拟设计一个无模型自适应控制系统,对其进行控制。利用matlab对气动肌肉进行建模,并对模型进行无模型自适应控制算法的仿真。设计基于labview的气动肌肉控制系统,采用无模型自适应控制算法对单根气动肌肉进行控制。
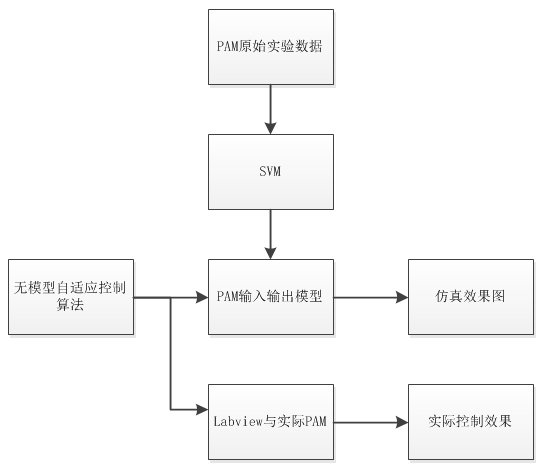
图1 结构框图
3. 研究计划与安排
(1)第1-4周:查阅相关文献资料,明确研究内容,了解研究所需理论基础。确定方案,完成开题报告。
(2)第5-6周:熟悉掌握基本理论,完成英文资料的翻译,熟悉相关工具软件的使用。
(3)第7-9周:实现气动肌肉的建模和控制算法的仿真。
4. 参考文献(12篇以上)
[1] hou z, bu x. model free adaptive control with data dropouts[j]. expert systems with applications, 2011, 38(8):10709-10717.
[2] yan j, hou z. convergence of mfac based feedback-feedforward ilc systems[c]. 2008 27th chinese control conference, 2008:2-6.
[3] 王斌锐, 沈国阳, 金英连,等. 基于干扰观测器的级联气动肌肉肘关节滑模控制[j]. 兵工学报, 2017, 38(4):793-801.



