V波段毫米波板上收发系统的功能开发毕业论文
2021-12-08 21:54:34
论文总字数:23986字
摘 要
V波段毫米波是60-80 GHz的微波,正广泛应用于智能汽车等应用的传感器开发,应用价值高,前景好。本文研究利用V波段毫米波板的收发系统开发测距,测速,测角的功能。
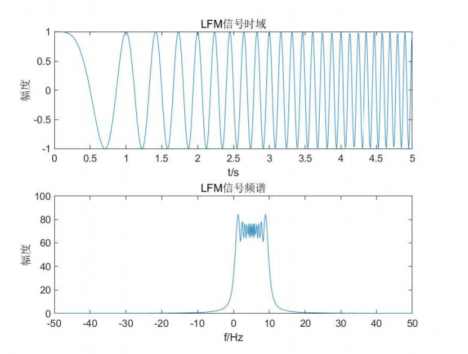
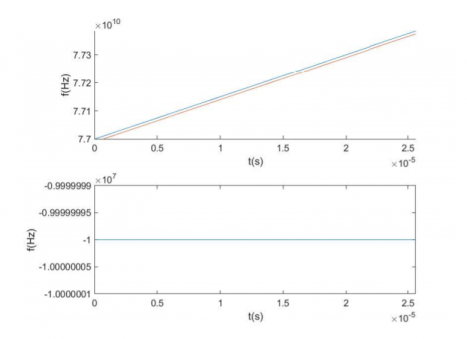
本文对线性调频信号的特性和线性调频连续波测距,测速,测角的原理进行了研究,对线性调频信号和中频信号的公式进行了推导。线性调频信号的频率随时间线性变化,它的发送与接收之间会有一个延时,发送信号和接收信号混频得到中频信号,其频率与这个延时时间线性相关,通过分析中频信号的频谱就可以得到物体的距离、速度、方位角。
本文研究了AWR1443的原理、结构和可开发功能,使用其收发参数用Matlab模拟了具有不同距离、速度、方位角的目标物体,模拟出了这些目标物体产生的中频信号,以及对信号进行了处理。对模拟的中频信号进行了一维距离FFT,二维多普勒FFT和三维角度FFT从而能够分辨出具有不同距离,不同速度或不同角度的目标物体,并求出对应目标物体的位置信息。
对于Matlab仿真得到的距离——速度谱进行了分析,提取出了峰值的信息,通过计算得到了目标物体的中频频率、多普勒频率、距离和速度,与目标物体通过公式计算得到的中频频率和多普勒频率,以及真实的距离和速度进行了对比,结果证实此方法能够以较高的精度检测目标物体的位置信息。
本文的特色:对于调频连续波雷达测量目标位置信息的原理进行了详细地推导,详细的介绍了AWR1443毫米波雷达开发板的功能,进行了基于Matlab的调频连续波雷达仿真。
关键词:V波段毫米波;调频连续波雷达;3D FFT;AWR1443。
Abstract
V-band millimeter wave is a microwave around 70 GHz that has high application value and good prospects, which is widely used in the development of sensors for smart cars and other applications. This paper intends to do a research on using the V-band millimeter wave board to develop the functions of measuring range, speed, and azimuths.
This paper has studied the principles of measuring range, velocity, and azimuths using chirps, and has derived the formulas of chirps and IF signals. The chirp is a signal whose frequency changes linearly with time. There will be a delay between sending the chirp and receiving the echo. The transmitted signal and the received signal are mixed to obtain an IF signal. The frequency of IF signal is linearly related to the delay. By analyzing the spectrum of the IF signal, I can get the distance, speed, and azimuth of the objects.
This paper has studied the principle, structure, and developable functions of AWR1443, and uses Matlab to simulate the objects with different distances, speeds, and azimuths using its sending and receiving parameters, which would generate IF signals that would finally be received by the digital frond end. Preforming 1-dimensional distance FFT, 2-dimensional Doppler FFT, and 3-dimensional angular FFT on the simulated IF signals make it possible to distinguish objects with different distances, different speeds, and different azimuths.
This paper has analyzed the distance-velocity spectrum obtained by Matlab simulation, and extracted the peak information. The intermediate frequency, doppler frequency, range and speed of the targets are calculated. By comparing targets’ real intermediate frequency, doppler frequency, range and speed, the reliability of this measurement is proved.
Features: This paper derives principles of FMCW, introduces the function of AWR1443 millimeter wave radar development board, and does some simulations of FMCW radar in Matlab.
Key Words:V-band millimeter wave;FMCW radar;AWR1443;3D FFT.
目 录
摘 要 ..................................................................... I
Abstract ...................................................................Ⅱ
第1章 绪论 1
1.1 研究背景及意义 1
1.2 国内外研究现状 1
1.2.1 微波生命体征检测 1
1.2.2 微波目标探测 2
1.2.3 微波高级汽车辅助驾驶系统 3
1.2.4 使用微波到V波段的迁移 3
1.2.5 V波段收发系统和AWR1443 4
1.3 本文的主要工作 4
第2章 雷达基础理论研究 5
2.1 雷达发射机与雷达接收机 5
2.1.1 雷达发射机 5
2.1.2 雷达接收机 6
2.2 自由空间的雷达传播方程 6
2.2.1 简单几何形状的雷达截面积 6
2.2.2 自由空间的雷达方程 7
2.3 FMCW雷达原理 8
2.3.1 线性调频信号 8
2.3.2 中频信号 10
2.3.3 中频信号的处理 11
2.4 本章小结 13
第3章 AWR1443板上开发系统与毫米波雷达开发套件 14
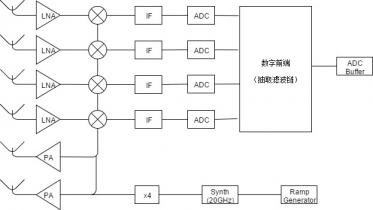
3.1 雷达前端 14
3.2 控制系统 16
3.3 数据路径处理链 17
3.4 数据处理单元 18
3.4.1 距离运算 18
3.4.2 多普勒运算 19
3.4.3 恒虚预警 19
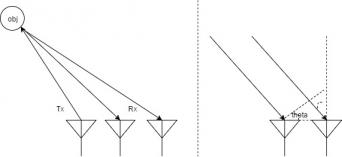
3.4.4 角度估计 20
3.5 本章小结 20
第4章 雷达信号处理仿真 21
4.1 3维FFT变换 21
4.2 FMCW雷达仿真 21
4.2.1 中频信号的产生 22
4.2.2 信号处理 23
4.3 本章小结 24
第5章 总结与展望 25
5.1 本文进行的主要工作 25
5.2 未来的展望 25
参考文献 ................................................................. 26
致 谢 .................................................................. 28
第1章 绪论
本章主要通过查阅文献和资料介绍了国内外对毫米波雷达技术的研究,并介绍了本文具体章节的内容。
1.1 研究背景及意义
随着现代社会汽车的普及,事故发生的频率增高,人们关于汽车驾驶的安全意识逐渐提高。又因为人们的生活水平逐渐提高,人们开始追求驾驶的舒适和方便。基于这些原因,人们对于高级驾驶辅助系统(Advanced Driver Assistance System-ADAS)的需求正在快速增长[1]。感应系统在ADAS中占据很重要的地位,而关于感应的方法,通常使用的是雷达传感器,因为雷达穿过非金属物质时不容易被环境影响。
AWR1443毫米波传感器能够产生线性调频连续波,利用调频连续波雷达的原理进行测距和测速的工作,再利用MIMO雷达技术对接收到的信号进行调制,就可以估计目标的方位角。AWR1443能够满足ADAS要求的高分辨率高精度的要求,实现测距,测速,测角的功能。
1.2 国内外研究现状
雷达技术已经存在了近一个世纪,应用范围很广,从军事到执法再到商业。在过去的十年里,人们对雷达的使用兴趣激增。
1.2.1 微波生命体征检测
生命体征监测主要运用了多普勒雷达技术,多普勒雷达技术是基于中频信号对于微小运动非常敏感这一事实发展出来的,可以测量出人体由于呼吸,心跳等产生的微小的位移,从而测量心跳和呼吸频率来达到监控生命体征的目的。这个技术可以被借鉴到调频连续波雷达,通过二维的多普勒变换得到多普勒频率来估算目标的移动速度。
2016年,Marco Mercuri 等人提出了一种生物医学无线雷达传感器网络[2]。通过无线雷达网络可以克服单个雷达的限制(多普勒限制、信号因家具存在而受阻)该网络由四个雷达传感器节点和一个基站组成,每个节点由一个微波雷达、一个无线个域网模块和一个微控制器组成,雷达模块以5.8 GHz的频率产生并向受试者发送一个连续波,并接收其反射的回波,其中包含由受试者的速度和心肺运动引起的多普勒频移,能够同时进行跌倒检测和生命体征监测。
Giovanni Diraco 等人提出了隐蔽的毫米波雷达监测系统[3]。这个系统使用了超宽带脉冲雷达,实现了高分辨率、高穿透和低功耗,适用于环境辅助生活。
2018年,Gianluca Gennarelli 等人提出用于穿墙生命活动识别的雷达系统[4]。该系统以多普勒雷达技术为基础,通过算法能够实时监测和识别建筑墙体后方的人类的活动状态,他们让雷达工作在S波段,使雷达信号能够穿过墙体。
1.2.2 微波目标探测
2016年,Nor Fatin Muhd Ariffin 等人提出了用于慢速运动目标检测的调频连续波雷达多普勒系统[5]。雷达遥感器工作在工业、科学、医学频段,中心频率2.4 GHz,发射功率约为11.3dBm,发射信号带宽为52MHz,该雷达还采用线性调频波形、双基地天线系统和多普勒模式操作,该雷达被设计用来同时测量慢速移动目标的速度和距离。
JEONG WOO CHOI 等人提出了一种基于脉冲无线电超宽带雷达系统的多目标检测算法[6]。该算法通过重复执行聚类和检测来实现多目标检测,更具体地说,系统检测到第一个由相邻的峰组成的单簇有效峰,然后重复该过程,直到连续检测到由多人引起的簇的有效峰。
请支付后下载全文,论文总字数:23986字
相关图片展示: