基于GPS轨迹提取城市路网的方法研究毕业论文
2020-02-19 18:14:49
摘 要
借助于滴滴盖亚数据开放计划发布的GPS轨迹数据作为数据源进行基于GPS轨迹点提取城市路网的方法研究,然后使用java高级编程语言对GPS轨迹数据进行轨迹预处理,在轨迹预处理的过程中,使用ArcGIS地理数据分析软件对数据处理结果进行展示,查看处理效果。GPS数据预处理分为三部分:(1)将GPS点数据进行栅格化,即图像化同时作为第一轮数据清洗;(2)将第一轮清洗后得到的结果集采用DBSCAN算法进行轨迹点聚类,同时作为第二轮数据清洗;(3)将第二轮清洗并聚类得到的结果集再次进行栅格化,然后进行二值图像的空洞填充。由此得到的轨迹数据已可以通过ArcGIS通过点数据图像化得到城市路网。而在点数据稀疏的情况或者比例尺较大的情况下,则需要将栅格化后的二值图像进行细化,本论文采用数学形态学细化算法进行操作,将得到的细化结果提取道路交叉点,最后使用B样条曲线拟合坐标点提取路网。结果显示无论是ArcGIS拟合的路网还是使用样条曲线拟合的路网均与现实路网高度匹配。
关键词:数据预处理;栅格化;聚类;数学形态学;提取路网
ABSTRACT
Use the GPS trajectory data released by DiDi GAIA Open Dataset Plan as data source to explore extraction method of urban road network based on GPS trajectory point . Then use the Java high-level programming language to track GPS trajectory data pretreatment, the trajectory in the process of pretreatment, using ArcGIS geographic data analysis software for data processing result show, view the treatment effect. GPS data preprocessing is divided into three parts :(1) rasterize GPS point data, that is, image data as the first round of data cleaning; (2) DBSCAN algorithm was used for trajectory point clustering of the result set obtained after the first round of cleaning, and it was used as the second round of data cleaning; (3) rasterize the result set obtained after the second round of cleaning and clustering, and then fill the holes in the binary image. The trajectory data obtained from this method can be used to obtain the urban road network through point data visualization through ArcGIS and MATLAB. In the case of sparse point data or large scale, the rasterized binary image needs to be refined. In this paper, the mathematical morphological refinement algorithm is adopted to carry out the operation. The obtained thinning results are used to extract the road intersection points, and finally, the B spline curve fitting coordinate points are used to extract the road network. The results show that both ArcGIS road network and spline curve road network are highly matched with the actual road network.
KEY WORDS:Data preprocessing; Rasterize; clustering; Mathematical morphology; Extraction of road network
目 录
摘 要 I
ABSTRACT II
目 录 III
第1章 绪论 1
1.1 研究背景和意义 1
1.2 基于GPS轨迹提取城市路网的研究现状 1
1.3 本文的研究目标和内容 1
1.4 论文结构 2
1.5 本章小结 2
第2章 GPS轨迹点数据预处理 3
2.1 轨迹数据介绍 3
2. 1. 1 轨迹数据来源 3
2. 1. 2 轨迹点数据结构 3
2.2 噪声滤波方法 4
2.3 轨迹点栅格化 5
2.3.1 轨迹点栅格过程 5
2.3.1 轨迹点栅格效果 5
2.4 数学形态学滤波 6
2.5 本章小结 7
第3章 轨迹数据聚类 9
3.1 基于DBSCAN算法的点数据聚类 9
3.1.1 DBSCAN算法介绍 9
3.1.2 DBSCAN算法的噪声滤波 9
3.1.3 DBSCAN算法实现 10
3.3 DBSCAN聚类的结果分析和处理 11
3.4 本章小结 11
第4章 数字图像细化 13
4.1 数学形态学腐蚀运算和击中击不中变换 13
4.2 数学形态学细化 14
4.3 道路交叉口提取 15
4.4 本章小结 16
第5章 道路中心线拟合 17
5.1 ArcGIS自动生成道路中心线 17
5.2 B样条曲线拟合道路中心线 17
5.3 本章小结 18
第6章 结束语 19
6.1 论文工作总结 19
6.2 问题和展望 19
致 谢 20
参考文献 21
第1章 绪论
1.1 研究背景和意义
道路网是人们日常生活的重要基石,现有的数字道路信息,包括城市路网一般是通过测绘和卫星遥感图像进行提取,测绘是历史悠久效率低下的方法,而利用数字图像处理方法对卫星遥感图像进行处理从而获得狮子道路信息又是成本非常高昂而且具有时滞性的方式。随着智能时代的到来,大数据作为智能时代的引擎,是推动各行各业迎接时代变更的强力驱动。就智能交通系统而言,各种富含地理信息的数据源都值得我们探究,而GPS轨迹数据更是蕴含了丰富的地理信息,城市路网也蕴含其中。在新的时代背景下,人们对于城市道路的认知程度有了更加及时,精准,快速的需求,为满足这些更高层次的需求以及控制生产过程中的投入,对于GPS轨迹数据提取城市路网的探究则是我们在时代更迭期间的必经之路。
1.2 基于GPS轨迹提取城市路网的研究现状
在智能时代,有效数据的重要性不言而喻,GPS轨迹数据中蕴含的丰富信息越发吸引学者一探究竟,对城市路网的提取方法探究也从未停止。
路网信息的提取最初是通过实地测绘来获取,虽然该方法的精确性无可挑剔,但它却有高成本,周期长,时滞性等缺点,而这些缺点在智能时代是不可接受的。随着卫星遥感影像的发展,运用数字图像处理方法从遥感影像中提取地理信息数据成为现在提取地理信息的主流方法,但遥感图像的质量无法得到保证,其相对时滞性和高成本的缺点也是存在的[2];除此之外,遥感影像结合点云数据对道路提取的研究也是层出不穷,但点云数据的获取同样存在成本高以及时滞性的问题[7]。这样的现状使学者们将目光投向了GPS轨迹数据。GPS轨迹数据的获取成本是最低廉而且及时的,但却蕴含着丰富的道路信息,并且伴随着Uber,滴滴等国内外出行软件的迅猛发展,数据的规模化和优质程度已完全满足学者们对路网提取的探究条件。针对GPS轨迹数据,有针对数字图像的道路提取方法,也有基于多边形的形态分析的道路提取方法,还有符合认知规律的路网生成方法以及通过对轨迹点聚类,分割提取城市路网的方法[2] [5] [7] [11]。各种方法均可以提取城市路网,却都也不尽完善。
1.3 本文的研究目标和内容
本文将通过对滴滴数据开放计划发布的轨迹数据进行分析研究,通过java高级编程语言用均值滤波,基于启发式滤波和数学形态学滤波等方法对源轨迹数据做预处理工作,然后再使用合适的聚类算法和数学形态学细化算法对轨迹数据进行进一步的数据处理工作,在处理的过程中,可以通过对数据的统计结果或可视化结果查看处理的效果,最后拟合的路网也会进行可视化,使用ArcGIS地理信息分析软件进行可视化;除了使用ArcGIS,还会使用MATLAB对经过处理的数据进行路网的拟合和可视化显示。
1.4 论文结构
本论文针对GPS轨迹数据提取城市路网进行分析研究,通过对滴滴盖亚数据开放计划发布的GPS数据进行分析处理,使用java,ArcGIS和MATLAB进行数据的处理和可视化最终得到城市路网。
本论文将分成六章来论述,每章的具体内容安排如下:
- 绪论主要介绍基于GPS轨迹数据提取城市路网的背景,意义和国内外的研究现状。
- 对轨迹数据预处理,包括对源数据的分析,对现有噪声滤波方法的简要介绍,由坐标点数据栅格化为数字图像以及对数据进行初步的噪声处理。
- 使用DBSCAN聚类算法对预处理后的轨迹点数据进行聚类和噪声滤波,从而提取出在路网结构上的轨迹点,并进一步删除噪声点,填补道路的孔洞并进行断路连接,为下一步数学形态学细化做准备。
- 使用数学形态学细化道路网。
- 拟合道路网并可视化结果。
- 结束语,对本论文的工作做归纳和总结,指出存在的问题和后续研究方向。
1.5 本章小结
本章主要介绍了基于GPS轨迹提取城市路网研究背景,意义和研究现状,提出了论文的研究目标和内容,最后阐述了论文的整体结构。
第2章 GPS轨迹点数据预处理
2.1 轨迹数据介绍
轨迹数据源的选取对本次课题研究起到基础性,决定性的作用,海量、优质、真实的轨迹数据是为现实应用场景提供解决方案的最理想数据。轨迹数据的结构和精度影响着我们课题研究的广度与深度以及决定着源数据所适应的解决方案,下面对轨迹数据进行介绍。
2.1.1 轨迹数据来源
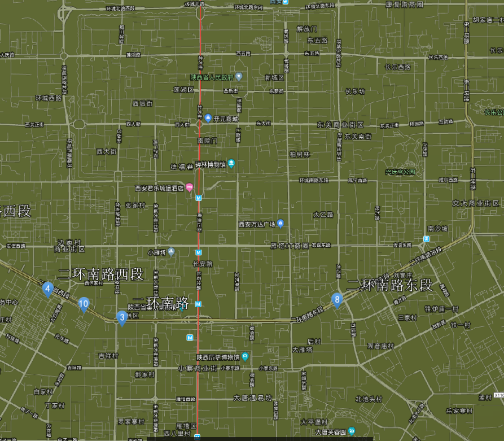
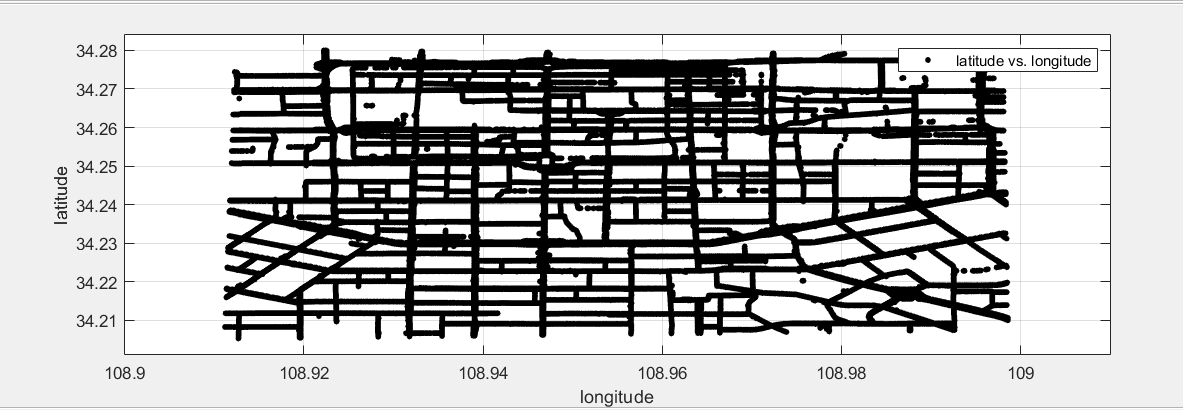
本数据为滴滴快专车平台在西安市的二环区域订单司机行车的轨迹数据,每2-4秒进行一次轨迹点采集。对2016年10月1日-10月31日进行收集,每日的数据量在2.6G左右,约为2900万条数据,总共有31个文件数据,为无后缀名的文本文件,可任意改变为合适的文件格式,由于实验环境的限制,本次数据处理的过程中只能将轨迹点保存为“.csv”格式的数据,其他格式均无法加载如此大的数据量,通常只能加载500M左右。
数据范围是: [108.92309,34.279936], [109.008833,34.278608];
[109.009348,34.207309],[108.921859,34.204946];
2.1.2 轨迹点数据结构
表2.1 点数据结构
字段 | 类型 | 示例 | 备注 |
司机订单 | String | glox.jrrlltBMvCh8nxqktdr2dtopmlH | 已经脱敏处理 |
订单ID | String | jkkt8kxniovIFuns9qrrlvst@iqnpkwz | 已经脱敏处理 |
时间戳 | String | 1501584540 | unix时间戳,单位为秒 |
经度 | String | 104.04392 | GCJ-02坐标系 |
纬度 | String | 34.20846 | GCJ-02坐标系 |
由表2.1可以看出,某辆车完成某一订单所形成的轨迹段可以用:
(2.1)
表示,表示中的一个轨迹点,在更为复杂全面的研究中,可以为每个轨迹点增加某些语义字段,比如,将点k表示为:
(2.2)
表示该轨迹点在下的轨迹瞬时方向,表示该轨迹点在下的轨迹瞬时速度。在一条订单轨迹下,轨迹点具有相同的属性值,即,且它们依据时间戳顺序排列:,然而在本文中使用的数据重心仅为轨迹点的经纬度信息,从经纬度值的精度可以计算出每个相邻点的距离为1.8米,这对实验中各种阈值的选择起着决定性作用。坐标系的选择也必须准确,否则会出现位置偏移。
2.2 噪声滤波方法
滴滴数据平台所接收的GPS点是由滴滴司机的移动端发送的,由于设备精度和一些其他原因,比如行驶在“都会峡谷”中,司机个人行为的不可预测因素等都会导致GPS点变成整体数据集的噪声点,空间定位坐标是没有绝对的精确性的,因此任何针对GPS轨迹点数据的研究,都需要对整体数据集中的噪声点进行处理。以下为轨迹噪声点滤波的常用方法介绍。
均值滤波:考虑每一个收集到的GPS点的坐标值均是测量值,真实值未知,当点数据身处一条轨迹中时,可以给出GPS点真实值的估计值,定义如下:
(2.3)
其中,点属于点时间维度上的个前驱点集,但由于本论文针对的点集不考虑时间维度的点属性,无法得知测量点的前驱,所以可以将此方法转换为对测量点某半径圆形区域范围内点集的均值计算,求值公式同上,只是所选点集不同。求得估计值后与测量值进行比较,当两者的误差超过预先设定的阈值,则判断测量点为噪声点并从集合中删除该点数据。但是此方法经过试验后不太适用本论文场景,因为其中阈值的确定较为困难,阈值选择错误会造成大量正常点变为异常点[3]。
启发式滤波:对于一个轨迹点来说,要想判断该点是否合理,根据时间和二维坐标计算点的速度属性,根据道路的限速值和前驱轨迹点的速度值可以限定轨迹点瞬时速度的阈值,当超过此阈值则被判断为异常点,作为噪声点处理。当不考虑速度属性时,基于启发式的轨迹点滤波还可以用概率值进行检测。统计的半径米圆形范围之内的所有轨迹点,统计这些轨迹的个数number。当number的值小于所设定的统计阈值,则判断该点为异常点,该点则被作为噪声点处理[3]。
数学形态学滤波:当点数据被栅格化为数字图像之后,有选择地排除图像的某种结构,当选择的结构为噪声时,就完成了基于数学形态学的噪声滤波。使用形态学的腐蚀运算可以收缩图像,消除物体边界点,把小于结构元素的物体,如毛刺、小突起去除,通过选取不同大小的结构元素,就可以在源图像中去掉不同大小的物体。膨胀运算具有扩大图像的作用,通过膨胀运算可以让图像中的裂缝等得到填补,如轨迹点发生断裂处可以通过膨胀运算进行连接。开运算可以使图像的轮廓变得光滑,断开狭窄的间断并且消除相对细小的突出物。闭运算也可以平滑图像的轮廓,但和开运算不同的是,它会填补轮廓线中的裂痕,消除小的孔洞并且消除狭窄的间断和细长的鸿沟。
2.3 轨迹点栅格化
2.3.1 轨迹点栅格过程
轨迹点栅格化不依赖于任何点本身的属性或点的从属,只依赖于其本身的位置值。栅格化也是数学形态学的处理方法之一。轨迹点栅格化定义如下:定义一个二维函数,轨迹点的经度值和纬度值作为输入参数,函数值为该空间离散点的灰度或覆盖指数,因为二维输入参数和函数值都是确定的有限的离散值,则依据此定义,轨迹点可以被栅格化为数字图像,GPS点的经度和纬度相应的被转化为数字图像的二维坐标,经纬度转化为二维坐标定义如下:
(2.4)
(2.5)
其中,,各自表示轨迹点覆盖区域的经纬度基值;,各自表示经纬度图像化后的空白域,删去空白域防止浪费内存;则决定数字图像的像元大小,即此变量值决定了栅格化后结数字图像的分辨率。数字图像在计算机中将用二维数组的形式表示,虽说二维数组的存储方式是以左上角为坐标原点,而空间轨迹点是以左下角为坐标原点,但此处不需要进行物理存储结构上坐标原点的转换,只需逻辑结构对应即可。
以上转化确定了输入变量,函数值在本论文中则可以被定义为单个像元的打击次数,即是其数字图像的单像元灰度。此处不能单纯的只栅格化为二值图像,否则部分噪声点也将落入二值图像的像元。在此处可以使用基于启发式的噪声滤波方法进行初步噪声滤波,将单像元灰度定义为统计值则可以进行初步消除噪声点,我们为单像元灰度设定一个阈值,当单像元灰度小于阈值时,该像元则被设为空白值,由此,部分噪声点可以被消除,该阈值的选择需由数据量决定,该阈值如果设置过大,在当天部分偏僻街道车辆行驶较少的情况下,正常的轨迹点也会被当作噪声点处理掉,当以两天甚至更多天数的数据量合并实验时,几乎每个行驶道路都会被重复击打多次,此时阈值的选择趋于定值。本论文在实验中经过测试后,得出较合适的阈值为3。
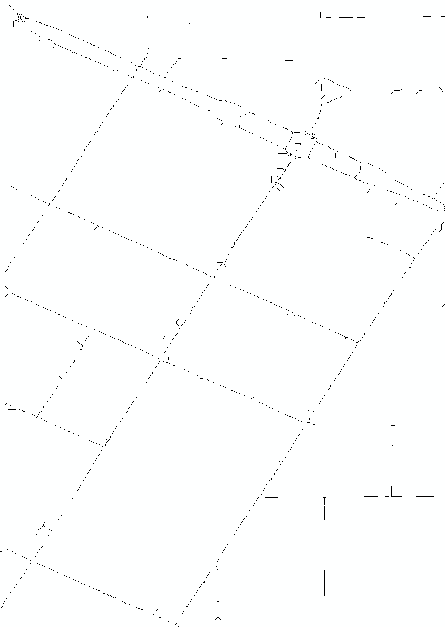
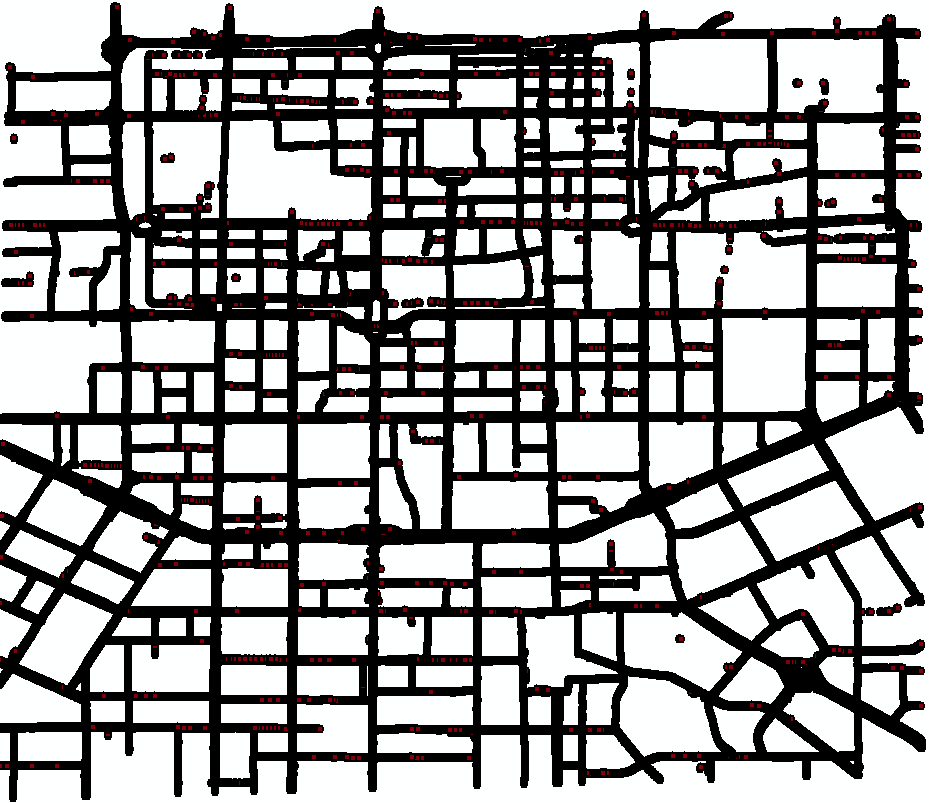
2.3.1 轨迹点栅格效果
将轨迹数据栅格化之后所得的数字图像已经大幅度降低了数据存储所消耗的内存和数据处理所花费的时间,特别是在时间上轨迹栅格化的结果对轨迹点数据的优化效果是无与伦比的,很明显的可以看出,将一整天共28334617条数据栅格化为数字图像后最终需要处理的数据量只有622316条,足足将轨迹数据量缩小到了1/45,是对冗余数据的最大层次的优化。图像化之后的点数据不仅减少了处理的数据量,在基于启发式滤波的算法中还具有自身的距离计算优势,相邻的GPS数据点可以直接通过二维坐标获取而不需要点对点的计算整个数据集的欧式距离。
2.4 数学形态学滤波
数学形态学分为二值形态学和灰度形态学,灰度形态学是二值形态学的拓展,通过2.3节对灰度图像经过初次滤波后,现在只需将灰度图像转化为二值图像,针对二值形态学进行变换即可.本次滤波运用经变化的数学形态学的腐蚀操作。
因为在本实验的初步阶段,实验对象并不一定是完全连通的数字图像,所以在对噪声点的处理过程中是针对某一特定的数字结构对待处理数字图像进行完全的强匹配腐蚀,即通过遍历,当数字图像中的某一像元域匹配了输入的结构元素,则对数字图像中匹配结构元素的像元域的中心像元赋值为0,这是消除结构元素的过程,而不是消除数字图像所有边界点的过程。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: